2 |
您所在的位置:网站首页 › 设备树视频教程 › 2 |
2
|
资料下载
coding无法使用浏览器打开,必须用git工具下载: git clone https://e.coding.net/weidongshan/linux/doc_and_source_for_drivers.git 视频观看百问网驱动大全 16.2 GPIO子系统重要概念 16.2.1 引入要操作GPIO引脚,先把所用引脚配置为GPIO功能,这通过Pinctrl子系统来实现。 然后就可以根据设置引脚方向(输入还是输出)、读值──获得电平状态,写值──输出高低电平。 以前我们通过寄存器来操作GPIO引脚,即使LED驱动程序,对于不同的板子它的代码也完全不同。 当BSP工程师实现了GPIO子系统后,我们就可以: a. 在设备树里指定GPIO引脚 b. 在驱动代码中: 使用GPIO子系统的标准函数获得GPIO、设置GPIO方向、读取/设置GPIO值。 这样的驱动代码,将是单板无关的。 16.2.2 在设备树中指定引脚在几乎所有ARM芯片中,GPIO都分为几组,每组中有若干个引脚。所以在使用GPIO子系统之前,就要先确定:它是哪组的?组里的哪一个? 在设备树中,“GPIO组”就是一个GPIO Controller,这通常都由芯片厂家设置好。我们要做的是找到它名字,比如“gpio1”,然后指定要用它里面的哪个引脚,比如。 有代码更直观,下图是一些芯片的GPIO控制器节点,它们一般都是厂家定义好,在xxx.dtsi文件中: “gpio-controller”表示这个节点是一个GPIO Controller,它下面有很多引脚。 “#gpio-cells = ”表示这个控制器下每一个引脚要用2个32位的数(cell)来描述。 为什么要用2个数?其实使用多个cell来描述一个引脚,这是GPIO Controller自己决定的。比如可以用其中一个cell来表示那是哪一个引脚,用另一个cell来表示它是高电平有效还是低电平有效,甚至还可以用更多的cell来示其他特性。 普遍的用法是,用第1个cell来表示哪一个引脚,用第2个cell来表示有效电平: GPIO_ACTIVE_HIGH : 高电平有效 GPIO_ACTIVE_LOW : 低电平有效定义GPIO Controller是芯片厂家的事,我们怎么引用某个引脚呢?在自己的设备节点中使用属性"[-]gpios",示例如下: 在设备树中指定了GPIO引脚,在驱动代码中如何使用? 也就是GPIO子系统的接口函数是什么? GPIO子系统有两套接口:基于描述符的(descriptor-based)、老的(legacy)。前者的函数都有前缀“gpiod_”,它使用gpio_desc结构体来表示一个引脚;后者的函数都有前缀“gpio_”,它使用一个整数来表示一个引脚。 要操作一个引脚,首先要get引脚,然后设置方向,读值、写值。 驱动程序中要包含头文件, #include // descriptor-based或 #include // legacy下表列出常用的函数: descriptor-basedlegacy说明获得GPIOgpiod_getgpio_requestgpiod_get_indexgpiod_get_arraygpio_request_arraydevm_gpiod_getdevm_gpiod_get_indexdevm_gpiod_get_array设置方向gpiod_direction_inputgpio_direction_inputgpiod_direction_outputgpio_direction_output读值、写值gpiod_get_valuegpio_get_valuegpiod_set_valuegpio_set_value释放GPIOgpio_freegpio_freegpiod_putgpio_free_arraygpiod_put_arraydevm_gpiod_putdevm_gpiod_put_array有前缀“devm_”的含义是“设备资源管理”(Managed Device Resource),这是一种自动释放资源的机制。它的思想是“资源是属于设备的,设备不存在时资源就可以自动释放”。 比如在Linux开发过程中,先申请了GPIO,再申请内存;如果内存申请失败,那么在返回之前就需要先释放GPIO资源。如果使用devm的相关函数,在内存申请失败时可以直接返回:设备的销毁函数会自动地释放已经申请了的GPIO资源。 建议使用“devm_”版本的相关函数。 举例,假设备在设备树中有如下节点: foo_device { compatible = "acme,foo"; ... led-gpios = , /* red */ , /* green */ ; /* blue */ power-gpios = ; };那么可以使用下面的函数获得引脚: struct gpio_desc *red, *green, *blue, *power; red = gpiod_get_index(dev, "led", 0, GPIOD_OUT_HIGH); green = gpiod_get_index(dev, "led", 1, GPIOD_OUT_HIGH); blue = gpiod_get_index(dev, "led", 2, GPIOD_OUT_HIGH); power = gpiod_get(dev, "power", GPIOD_OUT_HIGH);要注意的是,gpiod_set_value设置的值是“逻辑值”,不一定等于物理值。 什么意思? 旧的“gpio_”函数没办法根据设备树信息获得引脚,它需要先知道引脚号。 引脚号怎么确定? 在GPIO子系统中,每注册一个GPIO Controller时会确定它的“base number”,那么这个控制器里的第n号引脚的号码就是:base number + n。 但是如果硬件有变化、设备树有变化,这个base number并不能保证是固定的,应该查看sysfs来确定base number。 16.2.4 sysfs中的访问方法_IMX6ULL在sysfs中访问GPIO,实际上用的就是引脚号,老的方法。 a. 先确定某个GPIO Controller的基准引脚号(base number),再计算出某个引脚的号码。 方法如下: ① 先在开发板的/sys/class/gpio目录下,找到各个gpiochipXXX目录: b. 基于sysfs操作引脚: 以100ask_imx6ull为例,它有一个按键,原理图如下: 注意:如果驱动程序已经使用了该引脚,那么将会export失败,会提示下面的错误: 在sysfs中访问GPIO,实际上用的就是引脚号,老的方法。 a. 先确定某个GPIO Controller的基准引脚号(base number),再计算出某个引脚的号码。 方法如下: ① 先在开发板的/sys/class/gpio目录下,找到各个gpiochipXXX目录: b. 基于sysfs操作引脚: 以100ask_stm32mp157为例,它有一个按键,原理图如下: 注意:如果驱动程序已经使用了该引脚,那么将会export失败,会提示下面的错误: |
 我们暂时只需要关心里面的这2个属性:
我们暂时只需要关心里面的这2个属性: 上图中,可以使用gpios属性,也可以使用name-gpios属性。
上图中,可以使用gpios属性,也可以使用name-gpios属性。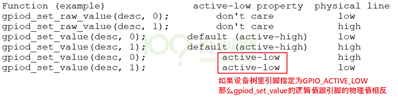
 ② 然后进入某个gpiochip目录,查看文件label的内容 ③ 根据label的内容对比设备树 label内容来自设备树,比如它的寄存器基地址。用来跟设备树(dtsi文件)比较,就可以知道这对应哪一个GPIO Controller。 下图是在100asK_imx6ull上运行的结果,通过对比设备树可知gpiochip96对应gpio4:
② 然后进入某个gpiochip目录,查看文件label的内容 ③ 根据label的内容对比设备树 label内容来自设备树,比如它的寄存器基地址。用来跟设备树(dtsi文件)比较,就可以知道这对应哪一个GPIO Controller。 下图是在100asK_imx6ull上运行的结果,通过对比设备树可知gpiochip96对应gpio4: 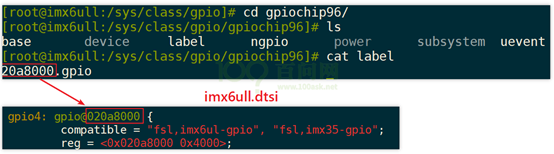 所以gpio4这组引脚的基准引脚号就是96,这也可以“cat base”来再次确认。
所以gpio4这组引脚的基准引脚号就是96,这也可以“cat base”来再次确认。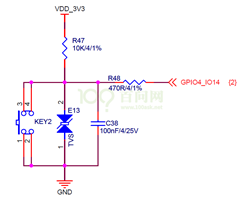 那么GPIO4_14的号码是96+14=110,可以如下操作读取按键值:
那么GPIO4_14的号码是96+14=110,可以如下操作读取按键值: 对于输出引脚,假设引脚号为N,可以用下面的方法设置它的值为1:
对于输出引脚,假设引脚号为N,可以用下面的方法设置它的值为1: ② 然后进入某个gpiochip目录,查看文件label的内容 ③ 根据label的内容就知道它是哪组引脚 下图是在100ask_stm32mp157上运行的结果,可知gpiochip96对应GPIOG:
② 然后进入某个gpiochip目录,查看文件label的内容 ③ 根据label的内容就知道它是哪组引脚 下图是在100ask_stm32mp157上运行的结果,可知gpiochip96对应GPIOG:  所以GPIOG这组引脚的基准引脚号就是96,这也可以“cat base”来再次确认。
所以GPIOG这组引脚的基准引脚号就是96,这也可以“cat base”来再次确认。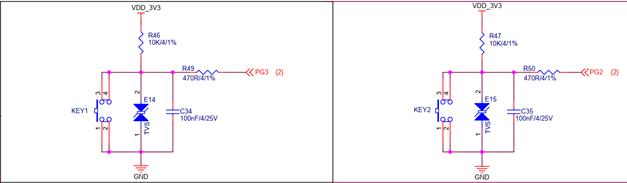 那么PG2的号码是96+2=98,可以如下操作读取按键值:
那么PG2的号码是96+2=98,可以如下操作读取按键值: 对于输出引脚,假设引脚号为N,可以用下面的方法设置它的值为1:
对于输出引脚,假设引脚号为N,可以用下面的方法设置它的值为1:【本文地址】