计算机视觉教程(第三版)期末复习笔记 第五章 目标分割(图搜索、主动轮廓模型、基本阈值技术的原理和分类) |
您所在的位置:网站首页 › 计算机视觉教程第三版课后答案第一章 › 计算机视觉教程(第三版)期末复习笔记 第五章 目标分割(图搜索、主动轮廓模型、基本阈值技术的原理和分类) |
计算机视觉教程(第三版)期末复习笔记 第五章 目标分割(图搜索、主动轮廓模型、基本阈值技术的原理和分类)
|
用书:
计算机视觉教程(微课版 第3版)
作者: 章毓晋 出版社: 人民邮电出版社 不一定全,只针对我们期末画的范围,只有一到六章。目录 第五章 目标分割 如果看完了对图这部分还不是很理解的话,可以私信我。我之后可以单独录一个视频说一下这章画图题的解法。 一、图搜索 1. 图搜索的概念 2. ⭐代价函数⭐ 3. 图 4. 图搜索示例 5. 搜索图 (1)搜索图的概念 (2)⭐画出搜索图的方法步骤⭐ 二、主动轮廓模型 三、基本阈值技术的原理和分类(理解) 1. 原理 2. 分类 第五章 目标分割 如果看完了对图这部分还不是很理解的话,可以私信我。我之后可以单独录一个视频说一下这章画图题的解法。 一、图搜索⭐这部分的内容比较抽象,而且考试很大概率会考画图题,下面我会尽量多花点笔墨用通俗易懂的方式来解释⭐ 这里请先记住一个最基本的概念,图搜索的本质是轮廓搜索。也就是说图搜索的目的是为了找轮廓,从而起到目标分割的作用。(目标分割和轮廓搜索的概念在课本第五章开头就有,我这里就不多引述了) 1. 图搜索的概念将边界点的和编辑段用图(结构)来表示,通过在图中搜索对应最小代价的通道来获得目标的闭合边界,这就是图搜索方法。 2. ⭐代价函数⭐(记住它,这是个贯穿整个图搜索的重点)
代价 = 图像中的最大灰度值 - [ 像素p的灰度值 - 像素q的灰度值 ] (下划线部分可以理解为是两个像素的灰度差的绝对值) 3. 图图一般长这样:
课本上对图的概念介绍的很抽象,这里我用简单的说法帮大家理解: 黑色圆点:代表一个像素两个圆点之间的直线(弧):一个像素到另一个像素之间的通路并且,每条通路都有一个自身的代价,相当于你走这条路要花费多少,自然情况下从起点到终点肯定是花费的代价越少越好。代价使用上面的代价函数进行计算。 这里有一个问题,实际上,我们看到的图片中的像素应该是这样的:
然后,如果要表示像素与像素之间的轮廓,应该是这样:
❓所以对于5.1.1的图,我们要怎么去表示它用图搜索得到的目标轮廓呢❓ 4. 图搜索示例⭐记住一件事,我们的目的是要得到目标轮廓,我们的目的不是找通路,而是找轮廓。⭐ 所以对于上面提出的问题,实际上方法是一样的。
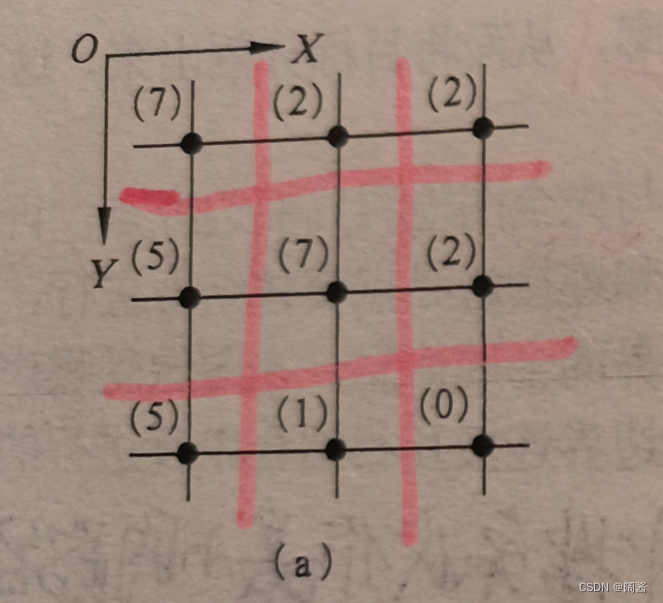
对于图5.1.1,这里每个黑色圆点(以下就简称为像素了)旁边加入了括号以及括号内的数字。括号内的数字代表的是这个像素的灰度值。 那么代价的计算,自然也是基于灰度值来计算的。(为什么是灰度值,因为所有的图像检测与分割都是基于像素之间的灰度值差来进行的,灰度值差小→代价大,灰度值差大→代价小。每条通路的代价与通路对应的两个像素之间的梯度值成反比)
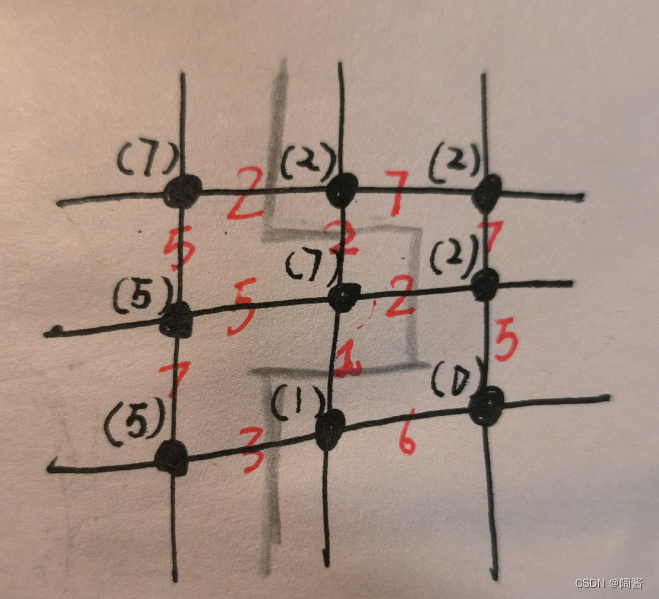
对于每一个图,我们都要对每两个互为4邻域(也就是上下左右,不能走邪角)的像素进行代价的计算,也就是算出每一条通路的代价。 算出了代价,才能决定目标轮廓是应该横着取还是竖着取。 我这里已经算好了:(考试不要这么画哈这个为了是方便理解画的)
相当于:
和书上的是同一个道理,只不过我上面用了更直观的方法而已: (这样的才是正确的画法)
通过图搜索得到目标轮廓以后,我们可以画出它的搜索图。它相当于一个动态过程的描述,记录了你上面是怎么一步步得到目标轮廓的。 每个结点(图中用长方框表示)对应一个边缘元素。 每个长方框中的两对数分别代表边缘元素两边的像素坐标。有阴影的长方框代表目标结点。如果两个边缘元素是前后连接的,则所对应的前后两个结点之间用箭头连接。每个边缘元素的代价数值都由代价函数公式计算,并标在图中指向该元素的箭头上。这个数值代表了如果用这个边缘元素作为边界的一部分所需要的代价。每条从起始结点到目标结点的通路都是一个可能的边界。图中粗线箭头连起来表示最小代价通路。
一般来说,起点是坐标为(0,0)的像素。每个方框代表一段通路(毕竟里面有两个像素的坐标,两个两素对应的就是一段弧,也就是通路嘛)每个不同的分支路口,我们都选代价更小的路一直往下走。 【注】上图有几个不知道是不是错误的地方,按理来说代价函数应该是最大灰度值减去两个像素的灰度值差,这两个像素的灰度值差应该是取绝对值得,如果不取绝对值的话两个像素如果相减顺序不一样就会算出不一样的值,按照代价函数的定义来说这是不合理的。 图上大于7的代价应该拿14去减去这个数,算出来的才是原来正常取绝对值算得的代价。分支行进的结果和原来也是一样的。
当然我这里只是我个人的推测,因为我研读了课本的定义半天也不知道为啥搜索图这里的代价可以不加绝对值算。。。我们老师说这个灰度值差应该是取绝对值的,有知道为什么的朋友请在私信或者评论告诉我。 (2)⭐画出搜索图的方法步骤⭐ 画出所有可能的路线计算每条通路的代价选择代价更小的路一直往下走 二、主动轮廓模型 主动轮廓模型是一种基于边缘信息的目标分割方法。它先初步构建一个围绕图像中目标的初始封闭轮廓曲线,再通过进一步改变封闭曲线的形状以逐渐逼近目标的真是轮廓。这个过程是一个串行的过程。在对目标轮廓的逼近过程中,封闭曲线像蛇一样爬行不断改变形状,因此主动轮廓模型也成为蛇模型。 三、基本阈值技术的原理和分类(理解) 1. 原理如果图像中有多个灰度值不同的区域,那么可以选择一系列的阈值以便将每个像素分到合适的类别中去。 如果只用一个阈值分割称为单阈值技术,如果用多个阈值分割称为多阈值技术。 2. 分类 阈值分割方法的关键问题是选取合适的阈值。
|







【本文地址】
今日新闻 |
推荐新闻 |