两点边值问题求解 |
您所在的位置:网站首页 › 解二阶微分方程matlab › 两点边值问题求解 |
两点边值问题求解
|
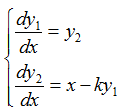
我第一次接触bvp4c函数是在《最优控制》课程上。例2是课程上布置的利用bvp4c函数求解最优控制的问题。本篇文章是我参考文末的材料加上自己的理解编写而成。 bvp4c函数用于数值求解两点边值问题,作为Matlab中对ode系列函数的补充。ode系列函数只能数值求解具有初值的常微分方程。 1、调用格式 sol = bvp4c(odefun,bcfun,solinit,options,p1,p2,…) 其中, 1) odefun 函数为微分方程的函数句柄。 function dydx=odefun(x,y,p1,p2,…) 其中,x为标量,y为列向量,p1,p2是在主函数中给出的参数向量。odefun(x,y)必须返回列向量dydx,表示 f(x,y)。 2) bcfun 函数为微分方程的边界条件句柄。 function res=bcfun(ya,yb,p1,p2,…) 其中,ya和yb是与y(a)和y(b)对应的列向量,ya表示初值,yb表示终值。输出res是列向量。若ya(i)的值为a,则程序里应表示为ya(i)-a。 3)solinit为包含初始估计解的结构体,应使用bvpinit函数创建,solinit=bvpinit(x,y),x向量为初始网格的排序节点,应满足边界条件a= solinit.x(1)且b =solinit.x(end)。向量y为初始估计解,使得solinit.y(:,i)为在solinit.x(i)节点处的初始估计解。以常值作为初始猜测值。有时候,随便给初值即可。如果随便给初值算不出来,可以用continuaion方法给初值,详见参考4。应注意,向量x和y的长度互不相关。 4)options为可选积分参数。使用bvpset函数创建的结构体。一般情况可用[]代替。 5)输出sol为一结构体,为特定数量点对应的解,其所包含的字段如下表所示。为使曲线变得更光滑,需要在中间插入一些点,使用deval函数,sxint=deval(sol,xint), 其中,xint为点向量,函数deval根据这些点向量求解。sol为函数bvp4c的输出。 sol.x Bvp4c 选择的网格 sol.y sol.x 网格点处y(x)的近似值 sol.yp sol.x 网格点处y’(x)的近似值 sol.parameters bvp4c 针对未知参数返回的值(如果有) sol.solver ‘bvp4c’ sol.stats 计算成本统计信息(当设置stats选项和bvpset时,会显示此信息) 2、示例 例1求解常微分方程
边界条件y(0)=0,y(1)=0 首先,将微分方程换为标准格式
边界条件为
.m文件中程序编写如下:
运行结果为:
例2(求解最优控制问题-有约束的停车能耗最优控制) 初始时刻车辆位置为x1(0)=-2,速度为x2(0)=1,状态方程
容许控制为|u| |




【本文地址】
今日新闻 |
推荐新闻 |