齿轮篇 |
您所在的位置:网站首页 › 视觉三维测量方法有哪些 › 齿轮篇 |
齿轮篇
|
齿轮是机械设备中重要零部件之一,由于齿轮负载能力大,传动精度高,功率恒定等特点,在汽车工业,造船工业,航空航天,矿山设备等现代化大型设备中得到大量应用,其精度直接影响整个机械产品系统的寿命和性能。 除了精度不合格之外,齿轮产品还会出现齿顶圆柱面划痕、碰伤和崩角等常见的外观缺陷,这也是齿轮产品检测的重点。目前,大部分企业采用的是人工目视的方式,这种方式易受检测人员的情绪、外部环境等影响。人工检测速度慢、精度低、检验结果因人而异。为了解决传统人工检测方式存在的问题,实现工业产品自动化和智能化生产、产品生产全生命周期质量实时监控,目前机器视觉检测技术越来越受人们重视,被广泛应用于工业产品生产和质量检测。通常,商业化的缺陷检测方法多采用图像处理,基本步骤为预处理、分割、提取特征和归类。 然而,缺陷种类较多,传统机器视觉提取缺陷特征的能力有限,检测结果的准确率仍无法满足检测要求。近年来,深度学习在目标识别、边缘检测、特征提取和图像分割等视觉领域取得重大突破,成果显著。因此可以将传统的机器视觉与深度学习结合,优势互补,这也是目前机器视觉检测领域发展的主要趋势之一。 01齿轮外观缺陷机器视觉检测概述机器视觉检测系统主要由图像获取模块、图像处理模块、图像分析模块和图像结果存储模块四个模块组成。机器视觉的外观缺陷检测主要分为二维视觉外观缺陷检测技术和三维视觉外观缺陷检测技术。 二维视觉外观缺陷检测技术采用传统机器视觉或者深度学习配合工业相机,实现特征提取融合与检测结果分类,对外观瑕疵迅速比对和分类。 三维视觉外观缺陷检测技术利用成熟的三维视觉扫描仪提取被测物体表面的点云数据, 采用点云配准的方式来计算被测模型与标准模型之间的误差。人工设置的阈值,系统自动判断被测产品是否存在缺陷。 目前识别齿轮的表面缺陷大多采用二维视觉外观缺陷检测技术,该检测技术在机械制造、 食品工业、 集成电路和包装印刷等领域的应用研究大致可以分为两类:(1) 基于传统机器视觉的外观缺陷检测方法。传统机器视觉算法利用先验知识处理图像,采用直方图统计特征、灰度共生矩阵法和小波特征法等方式提取缺陷特征,最后通过分析特征的特点实现缺陷别。缺点是人工设计特征费时费力且不够全面, 识别速度慢, 准确率较低。(2) 基于深度学习的外观缺陷检测方法。该方法通过卷积神经网络训练图像样本数据,完成一系列特征提取,分析决策等工作。缺点是样本数据需求量大,可控性稍差,但神经网络特征信息提取比人工设计提取方式更加全面。 02基于深度学习的齿轮外观缺陷检测在对加工过程和运输过程中产生的齿轮齿顶圆柱面缺陷进行视觉检测中,目前主要有三种齿轮外观缺陷:  机器视觉的图像采集装置如图所示,主要由五个部分组成:① 计算机②工业相机③镜头④光源⑤实验载物平台,可以在载物台安装4组相机和镜头, 放置被测工件。  图像采集时,将待检测的齿轮放置在待检区域,经过合理计算布置,四台相机可以对齿轮齿顶圆柱面进行 360° 的完整图像采集,相机通过 USB 连接至计算机。 (1)工业相机和镜头选型机器视觉检测平台的关键部件是工业相机和镜头,合理的选型对采集到的图像质量、分辨率以及系统的运行模式具有重要意义。与普通的相机相比,工业相机具有更高的稳定性、 抗干扰能力和传输能力。工业相机按照感光芯片类型可分为 CCD(ChargeCoupled Device)和 CMO(Complementary Metal Oxide Semiconductor)两种类型。 CCD工业相机由于集成度低、无滞后、低电压、价格便宜的特点在视觉行业被广泛应用,而CMOS 工业相机具有良好的集成性、低功耗、宽动态范围、高传输速度和读取速度等特点,近年来开始快速占领高分辨率和高速场合的市场。相机的镜头需要参考相机的靶面尺寸、相机镜头的接口进行选型,其性能关系到工业相机的成像质量和成像范围。由于本次在较近的工作距离内采集齿轮的图像,因此选择短焦距的镜头,其选型的焦距计算公式为: 式中:f — 镜头的焦距;d — 工作距离, 即被测物体到镜头的距离;h — 相机靶面的高度;H — 目标视场的高度;(2)光源和照明方式选择 光源和照明方式在机器视觉检测系统中的主要功能是增强其对比度,使被测物体的成像更加清晰,有助于提高齿轮外观缺陷检测的准确率。常见的光源有卤素灯、 荧光灯和 LED 等。 在成本、稳定性、发热程度、耐用性等方面,LED 光源相比其他光源有较强的优势,因此本文选取 LED 为机器视觉检测系统提供光源。目前, 在视觉检测系统中,直接照明、暗场照明、背光照明和同轴照明是四种常用的照明方式,各种照明方式的示意图如图所示。 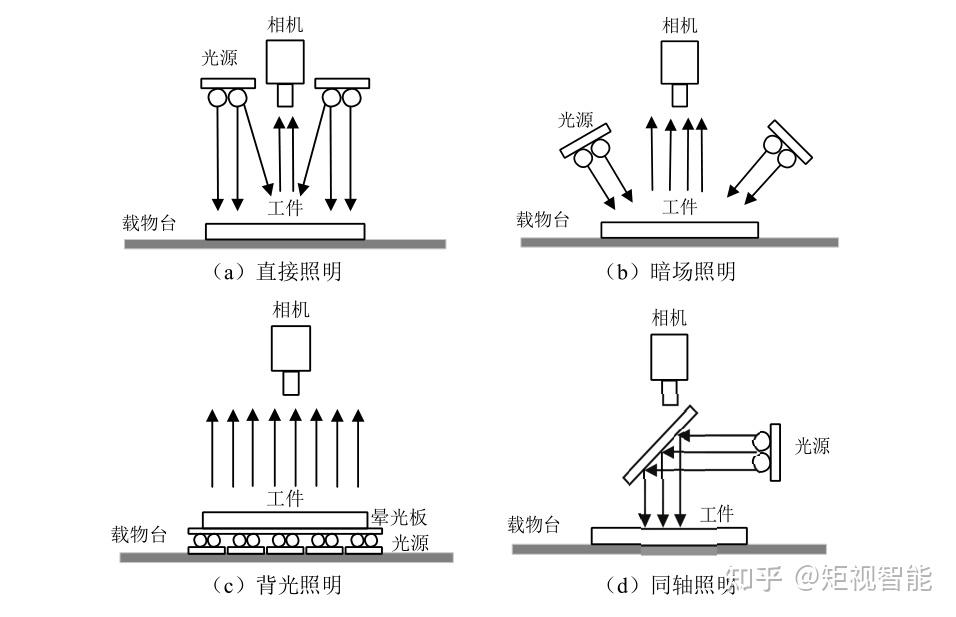 本次选择暗场照明的方式,原因是: ① 特征丢失问题直接照明方式可以增强图像的对比度,然而容易在光滑的反光表面是产生反射现象, 故不适合本次的金属制零件。背光照明可以在物体尺寸测量等方面, 但是表面特征会丢失; ② 成本问题同轴照明可以有效抑制物体表面的反射现象,可以检测具有高反射表面的物体,但是价格昂贵、成本较高。暗场照明是通过对物体表面进行低角度的照明方式, 适用于表面纹理和凹凸部分的检测, 有效抑制金属表面的反射现象。 03齿轮外观缺陷视觉检测基本流程齿轮外观缺陷视觉检测流程如图所示: 神经网络训练阶段,人工对齿轮缺陷图像数据集进行标注, 数据集中包含缺陷目标区域定位信息和缺陷的类型。基础卷积神经网络经过训练后, 提取齿轮图像 ROI 中缺陷的特征;利用提取的特征,输入至 RPN 网络自动生成一定数量与之相关的候选区域;将 features 输入到 ROI pooling 后转成固定长度并输出。通过分类和回归输出候选区域所属的类,对 anchors 微调得到候选区域在图像中的精确位置。  04 产品外观缺陷视觉检测技术发展趋势 近十年来,产品外观缺陷视觉检测技术迅速发展,除了使用传统的机器视觉技术外,以卷积神经网络为代表的深度学习技术开始慢慢地渗透至各种产品的检测领域,如钢轨、芯片、齿轮、织物等, 推动产品外观缺陷视觉检测的智能化和自动化的发展。 但是针对具体的检测对象,检测技术仍有很大的研究空间。目前产品外观缺陷视觉检测技术的研究有以下发展趋势: (1) 图像采集与预处理目标缺陷的特征会随着光照条件、拍摄角度与拍摄距离等不同而引起较大的不同。图像中噪声干扰、目标被遮挡也会对缺陷检测结果产生很大的影响。因此,如何搭建合理的检测环境和进行相应的图像处理是需要解决的问题。 (2)产品外观缺陷的在线视觉检测目前,有关产品外观缺陷在线视觉检测的研究较少,外观缺陷在线视觉检测的特点是数据量大、特征提取维度较高,缺陷类型多、冗余信息较多,如何从海量数据实时提取有效的缺陷,补充缺陷的训练样本方面存在较大难度。 (3)模型的普适性深度学习模型的本质是数据驱动的,需要大量原始图像数据,而可使用的图像数据集却很少。产品种类多,同一产品的不同缺陷类型多种多样,同一缺陷的表现形式各有不同且产生的原因未知。现有的深度学习网络模型各有优缺点并且只能针对某个具体产品的问题提取特征。研制自动化、可靠性高、易维护和多用途的机器视觉检测系统是未来的研究热点。 (4)模型检测准确性一个优秀的模型对检测准确率和召回率要求也很高,虽然目前有很多的优秀算法,但是离实际检测需求还有很长的一段路要走。因此,如何改进模型的结构、设计新的优化方法、降低模型训练难度和制定新的评价标准,这些都是亟需解决的问题。 矩视智能机器视觉低代码平台是一个面向机器视觉应用的云端协同开发平台,始终秉承0成本、0代码、0门槛、0硬件的产品理念。 平台以人工智能技术为核心,在机器视觉应用开发环节,为开发者提供图像采集、图像标注、算法开发、算法封装和应用集成的一站式完整工具链。覆盖字符识别、缺陷检测、目标定位、尺寸测量、3D测量、视频开发等上百项通用功能,致力于成为全球用户量最多,落地场景最广泛的机器视觉低代码平台。 欢迎长按识别下方链接免费使用 申请后我们会有工作人员第一时间与您联系,请耐心等待! 更多功能正在开发中,最新信息会第一时间在官方公众号“矩视智能”进行公布,欢迎大家关注 |
【本文地址】
今日新闻 |
推荐新闻 |