Proe行星齿轮机构运动仿真 |
您所在的位置:网站首页 › 行星齿轮的定义 › Proe行星齿轮机构运动仿真 |
Proe行星齿轮机构运动仿真
|
3.添加曲柄,连接类型选择【销钉】,销钉约束是需要一个轴对齐和面对齐进行定义,从而保证零件只能旋转不能沿着轴向运动。如下图所示,选择太阳轮的中心内孔面和曲柄的内孔面定义轴对齐,再选择下面的两个面进行对齐。
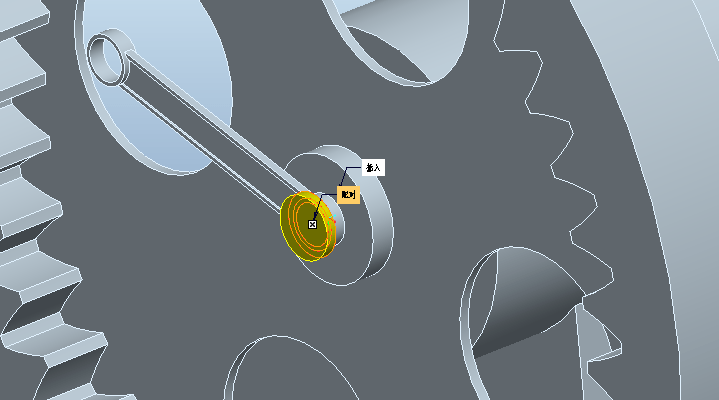
4.添加销钉,使用用户定义的约束即可,即只要定义轴对齐和一个面对齐即可。
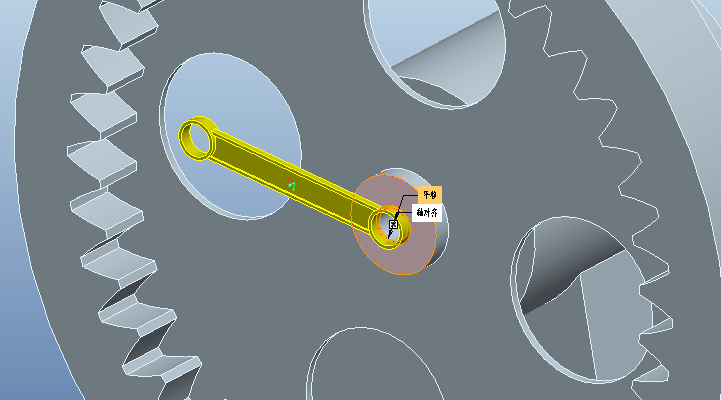
5.添加行星轮,行星轮围着太阳轮进行旋转,约束类型选择销钉,选择曲柄的内孔面和行星轮的内孔面定义轴对齐,选择如下的两个面定义面对齐。
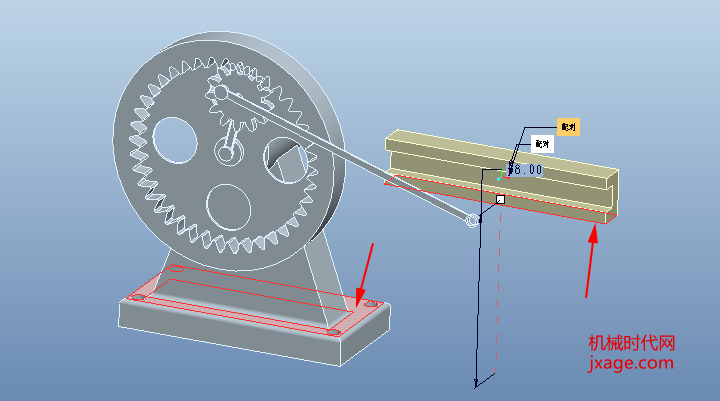
6.添加连杆,连杆与行星轮采用销钉约束。
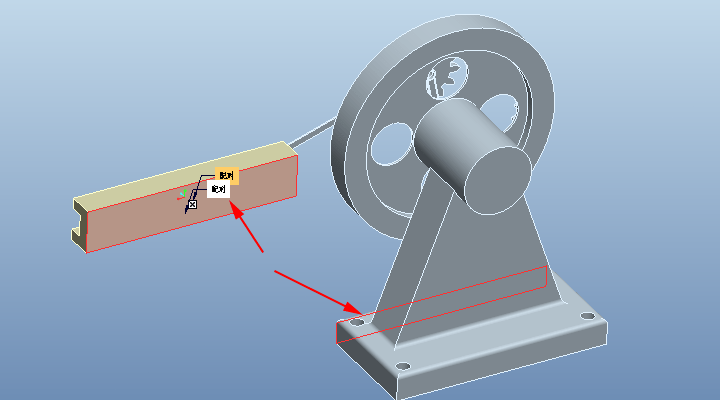
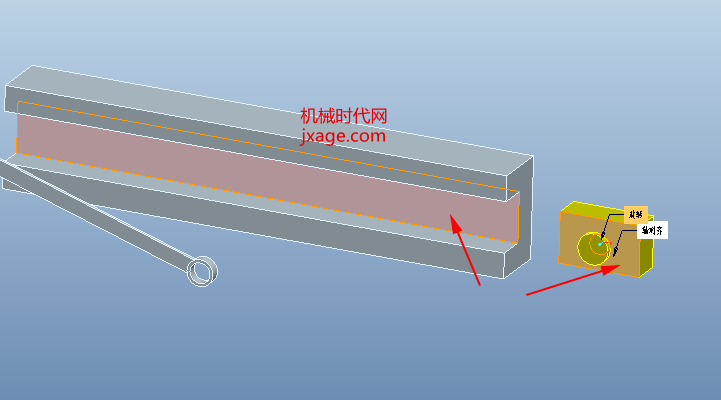
7.添加导轨,导轨的定位方式采用三个面进行定位,如下图所示。
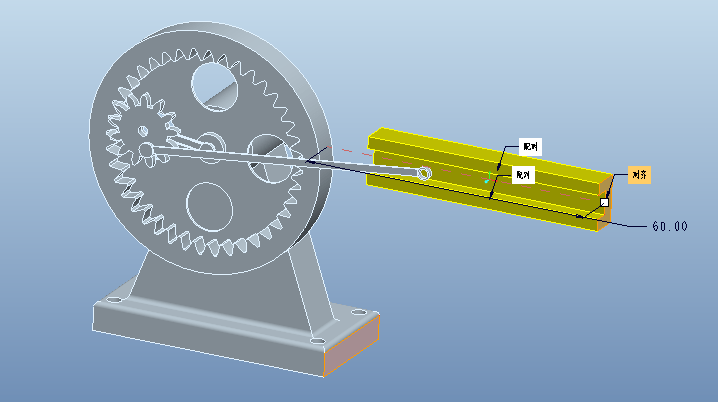
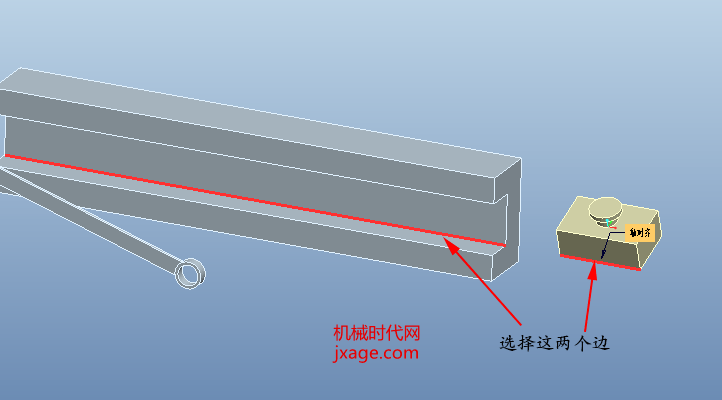
8.添加滑块,约束类型选择【滑动杆】,选择下图所示的两个边,再选择下图所示的两个面进行定义。滑动杆约束是指零件沿着某条固定的方向运动,但不能发生旋转,类似我们常见的导轨机构。
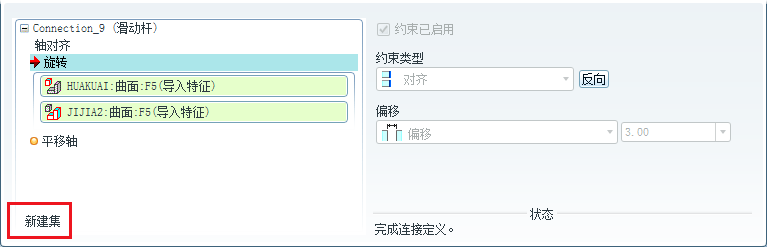
对于新手,可能会在这里产生疑问。滑块和导轨之间已经创建了约束,那么滑块和连杆如何设置约束啊? 我们可以点击【放置】,我们可以看到新建集,此时会自动生成一个滑动杆约束,这不是我们所需要的,将约束设置为圆柱约束。 有的人可能会问为啥是圆柱约束而不是销钉约束呢?因为假如将约束类型设置为销钉约束会出现过约束的问题。 选择连杆的内孔面和滑块的圆柱外表面即可定义圆柱约束。
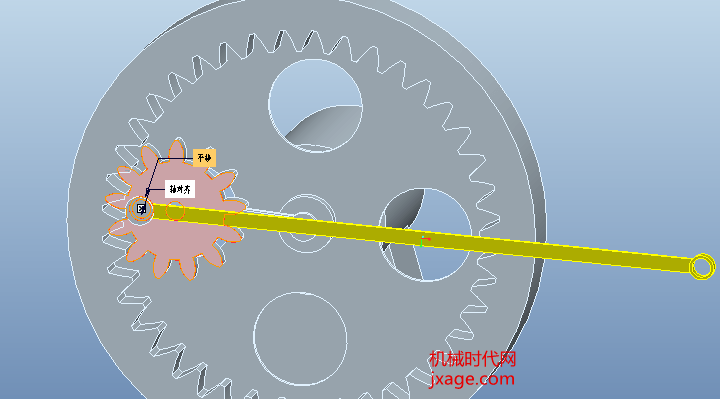
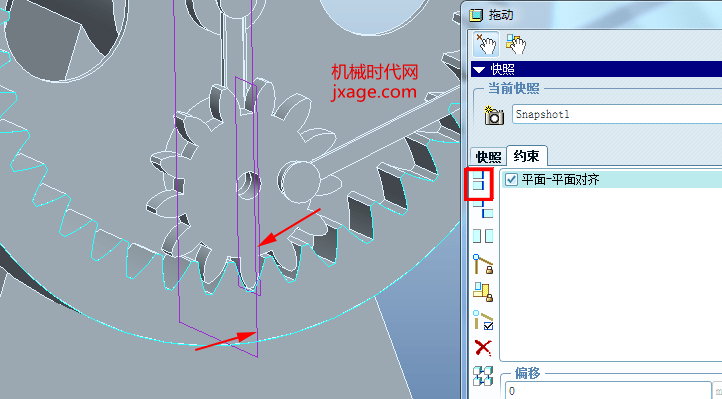
9.细心的同学会发现, 两个齿轮并没有很好的啮合,出现了干涉的情况,如何解决这个问题呢?我们可以点击【拖动元件】,点击【约束】,选择左侧的“平面-平面对齐”,再选择下图两个紫色的基准平面进行对齐,完成齿轮的准确啮合。
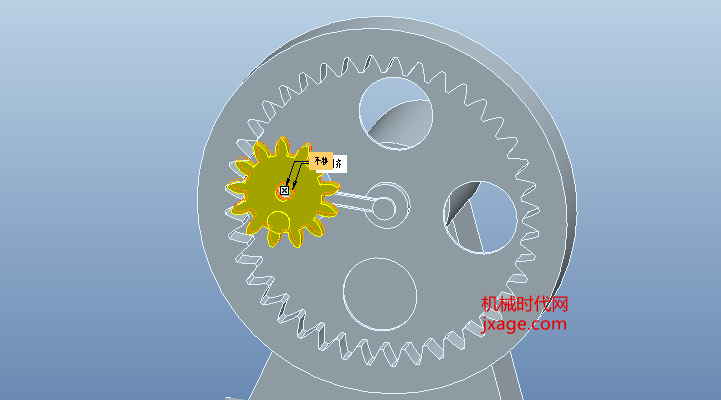
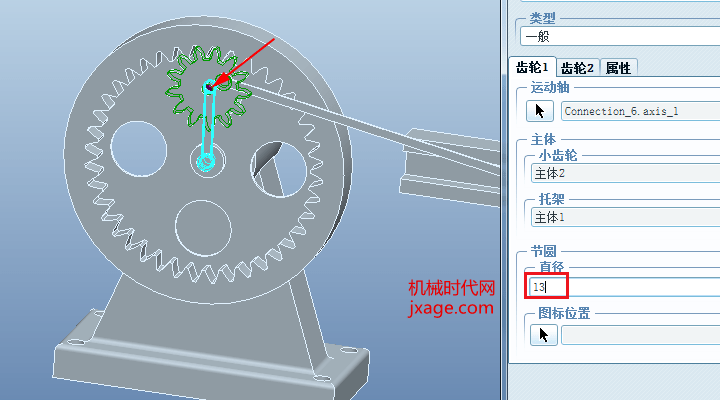
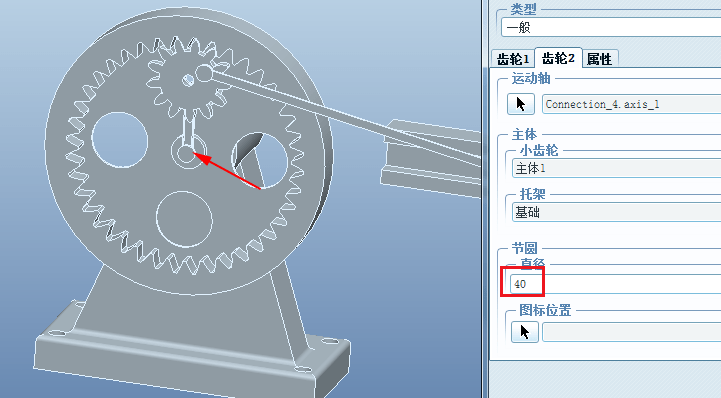
10.点击【应用程序】-【机构】,进入机构环境,点击右侧的【齿轮】,定义一个齿轮副。齿轮1选择行星轮的旋转副作为运动轴。直径输入13,其实这里输入的是齿数。 因为齿轮副的传动比是齿轮的分度圆直径之比,这个比值也等于齿轮的齿数之比。
齿轮2选择太阳轮的旋转副作为运动轴,直径输入40。
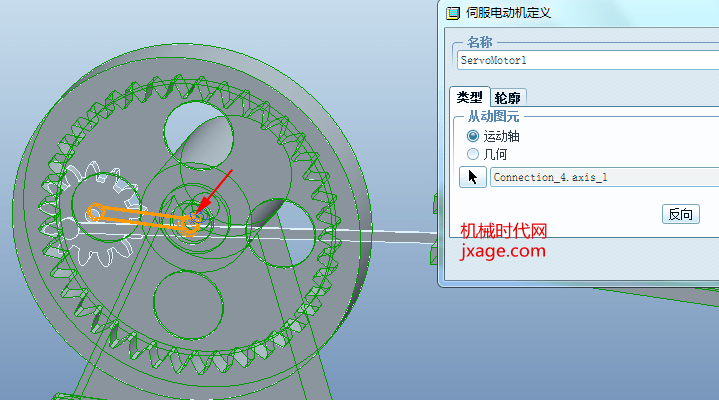
11.点击右侧的伺服电机,选择曲柄的旋转副作为运动轴。
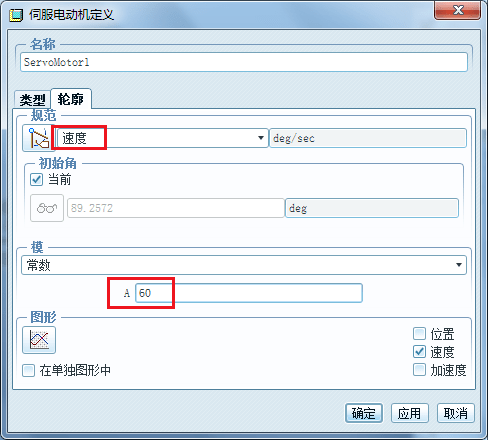
点击【轮廓】,按照下图设置伺服电机的参数。
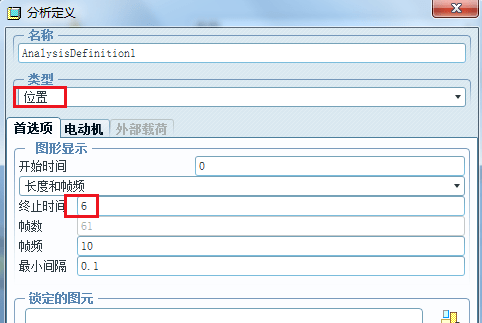
12.所有的设置全部结束了。点击正式进行运动仿真。点击【机构分析】,弹出下面的窗口,按照下图进行设置。
点击下面的运行,整个机构就运动起来了。
|
 返回搜狐,查看更多
返回搜狐,查看更多【本文地址】
今日新闻 |
推荐新闻 |