路径规划中常用的抽稀(simplification)算法 |
您所在的位置:网站首页 › 船舶中垂的特征 › 路径规划中常用的抽稀(simplification)算法 |
路径规划中常用的抽稀(simplification)算法
|
简介
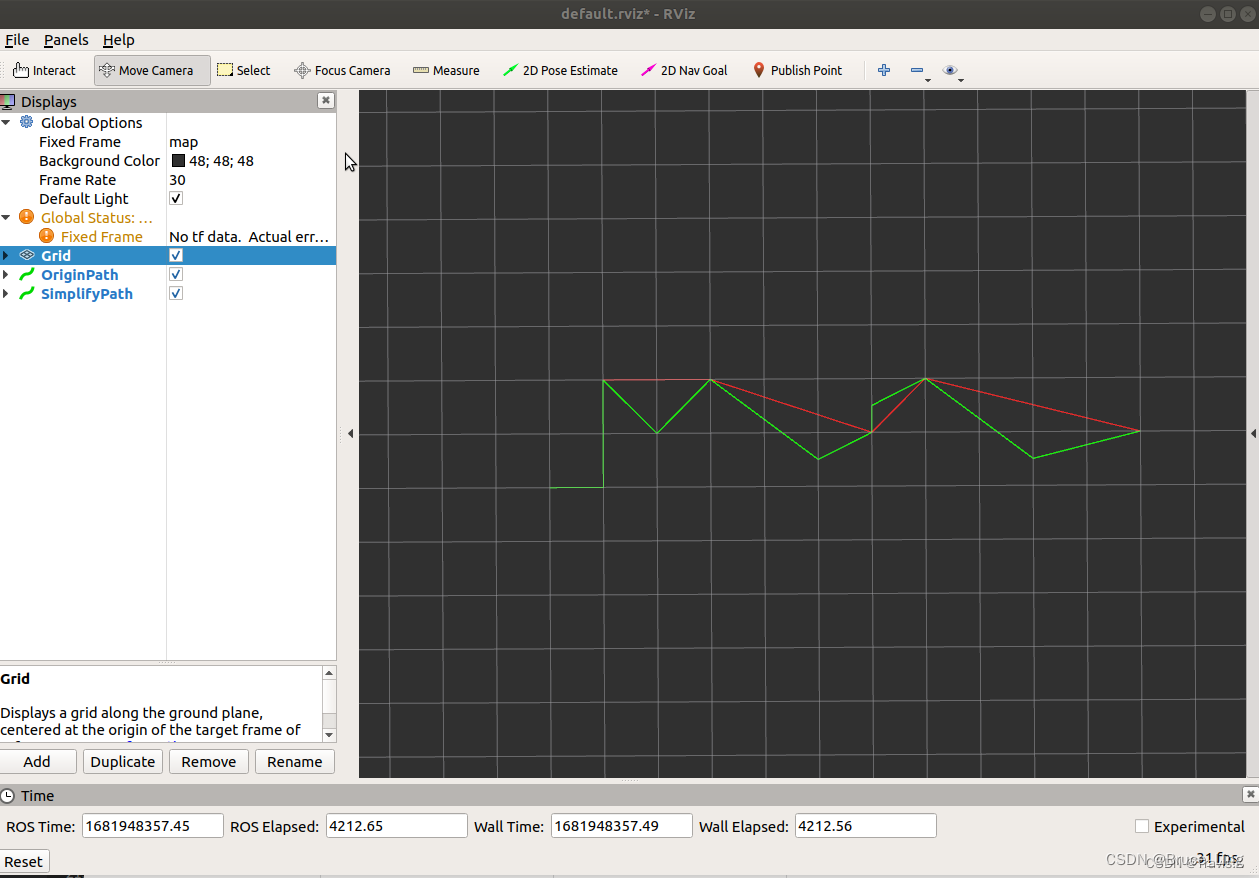
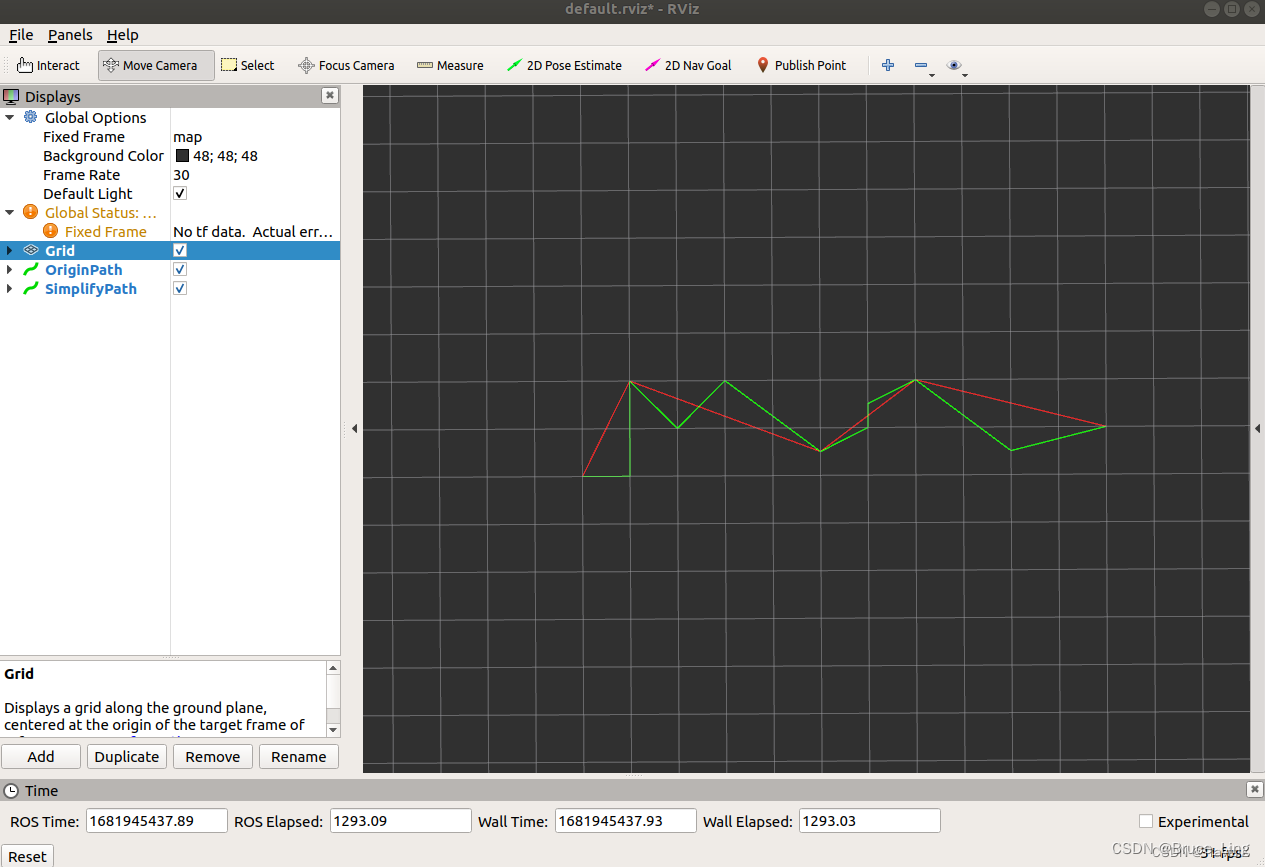
在路径规划中,过度密集的路径点不仅会增加计算和存储的负担,还可能导致路径冗余和效率下降,因此需要进行抽稀处理,同时保留路径的形状特征和轨迹信息,确保路径规划的精度和实时性。常见的抽稀算法有Ramer-Douglas-Peucker(RDP)算法和垂距限值法。 一、RDP算法基本原理: RDP算法基于几何距离,选定路径的起点和终点,然后寻找路径中离这条直线距离最大的点,如果这个最大距离大于一个预定的阈值,则将这个点加入到新的路径中,同时将原路径分为两部分,递归进行此操作;如果最大距离小于阈值,则所有的中间点都可以删除。
算法步骤: 1、已知给定的一条由n个点构成的路径。(两点之间可以是直线也可以是曲线) 2、在起点和终点之间找出垂距(点和直线的垂直距离)最大的点,如果垂距大于阈值,将路径以此点为分界点分为2部分;如果垂距小于阈值,剔除所有中间点。 3、递归步骤2.
基本原理: 垂距限值法其实可以看做是一种简化版本的Ramer-Douglas-Peucker算法(RDP算法),它主要用于路径或者轨迹的抽稀,即剔除冗余点,以简化数据结构,降低计算哈比森和存储的负担。 算法步骤: 1、已知给定的一条由n个点构成的路径。(两点之间可以是直线也可以是曲线) 2、除了起点和终点之外,计算所有点到起点和终点连成直线的垂距,如果垂距大于阈值,保留,反之,剔除。
还有一种算法是,基于每个点与上一个点和下一个点形成的直线的垂距进行抽稀。 |
【本文地址】