让无刷电机转起来 |
您所在的位置:网站首页 › 自己怎么做无刷电机 › 让无刷电机转起来 |
让无刷电机转起来
|
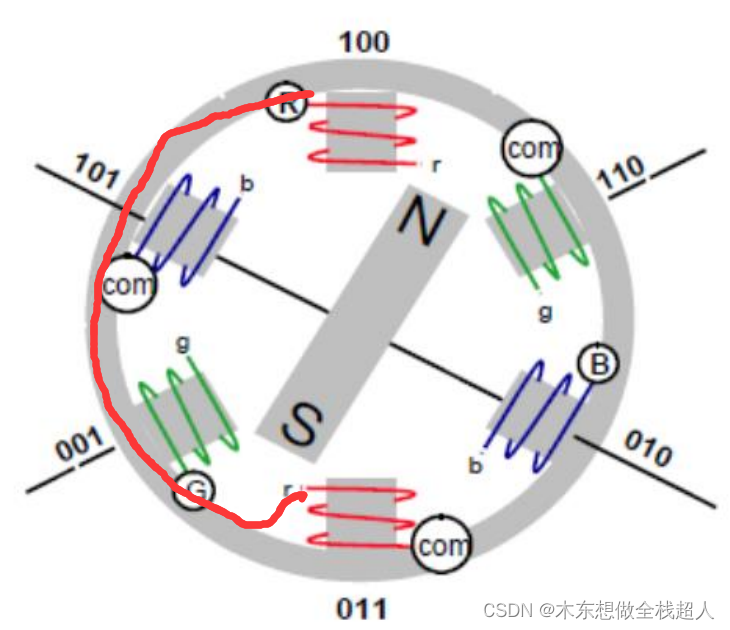
目录 1. 引言 2. 无刷电机换相原理 2.1 通电原理(一相) 2.2 换相原理(三相) 2.3 驱动电路 2.3.1 上下桥臂 2.3.2 六步换相 3. 结束语 1. 引言前面博客,博主对于无刷电机的驱动方式与电路作了简要的介绍,指路: 四轴-无刷电机无感控制(BLDC)-CSDN博客 说起电机换相,对于普通的直流电机(如舵机,空心杯)来说,只需要向其输入一个方向的PWM波,电机就能按照我们期望的方向与速度旋转。而稍微复杂一点的直流电机,如步进电机与无刷电机,则不能简单地使用一个PWM脉冲就可驱动。本文介绍的,即是常见直流电机中最为复杂的电机——无刷直流电机( Brushless Direct Current Motor,BLDC)的换相方法 关于步进电机换相:尽管步进电机的结构与无刷电机很相似,但在换相方法上,二者完全不同。无刷电机的换相方法为“六步换相”,而步进电机的换相方法为分时同电——即在单位时间内给不同的相通电,以达到换相的目的,感兴趣的读者请自行了解,本文不作具体说明 2. 无刷电机换相原理 2.1 通电原理(一相)图 2.1 是无刷电机的简化图:
图 2.1 无刷电机简化图 无刷电机中间有一块写着南北极的长方形,是一块永磁铁;固定在四周的,是通电线圈,每两个同色的线圈为一组 在每两个同色的线圈中,总有一个线圈上写着"COM",写着"COM"的线圈(后文将称其为“下桥臂”,而非COM的线圈为“上桥臂”,可移步至半桥电路小节了解详情)为线圈的公共结点。每组线圈的非COM端通过在电机四周环绕连至COM端(如图粗红线),所有线圈的COM端都会共同连到电源的负极(到电路讲解部分再倒过来看这一段,或许会清晰不少) 于是,便有了如下简图(图2.2):
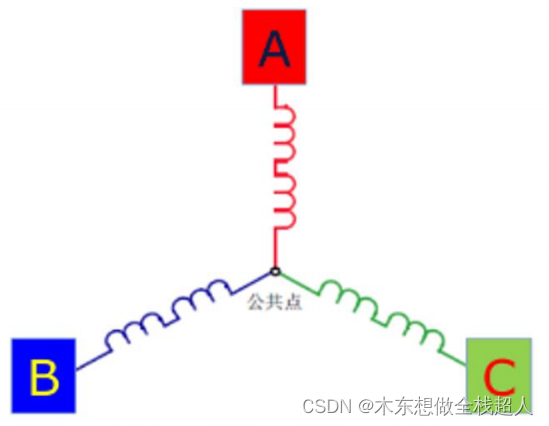
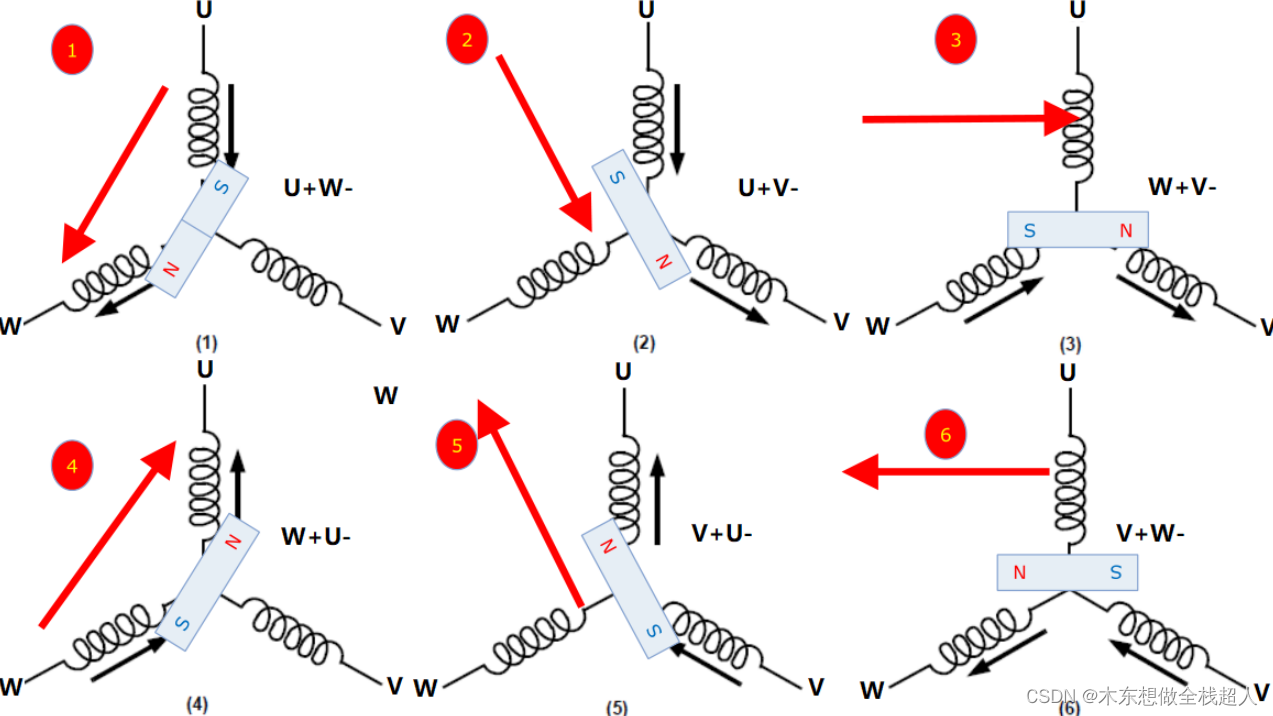
图 2.2 无刷电机电路图 此图将图 2.1 中COM端抽象至同一点,A/B/C为无刷电机三根电机线(也叫U/V/W),即无刷电机的基本导线只有三根 有些无刷电机会有5根或6根甚至更多的电机线,那是因为,除了基本的通电导线外,一些无刷电机还有(霍尔)传感器导线,这些多出来的导向负责检测无刷电机转子位置。无人机电机一般不涉及传感器导线,本文不做介绍 关于无霍尔无刷电机的转子位置检测,可以参考博主前文,指路: 四轴-无刷电机无感控制(BLDC)-CSDN博客 2.2 换相原理(三相)在 2.1 中,博主介绍了无刷电机中,一组线圈(一相)的通电原理,在2.2中,我们将会了解如何用三相的协作通电控制无刷电机运动 关于无刷电机三相协作通电(下称“换相”),依据前文的介绍,似乎将U/V/W相按照一定节奏交替通电,就能实现换相。理论上似乎是可行的,但是实际上并不是这样。单独将某一相通电,会发生短路的情况(电路部分会解释),要保证电路的安全,又要使无刷电机成功换相,就得让每一相的非“COM”端和"COM"端交替通电,交替通电的名称为“六步换相” 六步换相如图 2.2.1 所示:
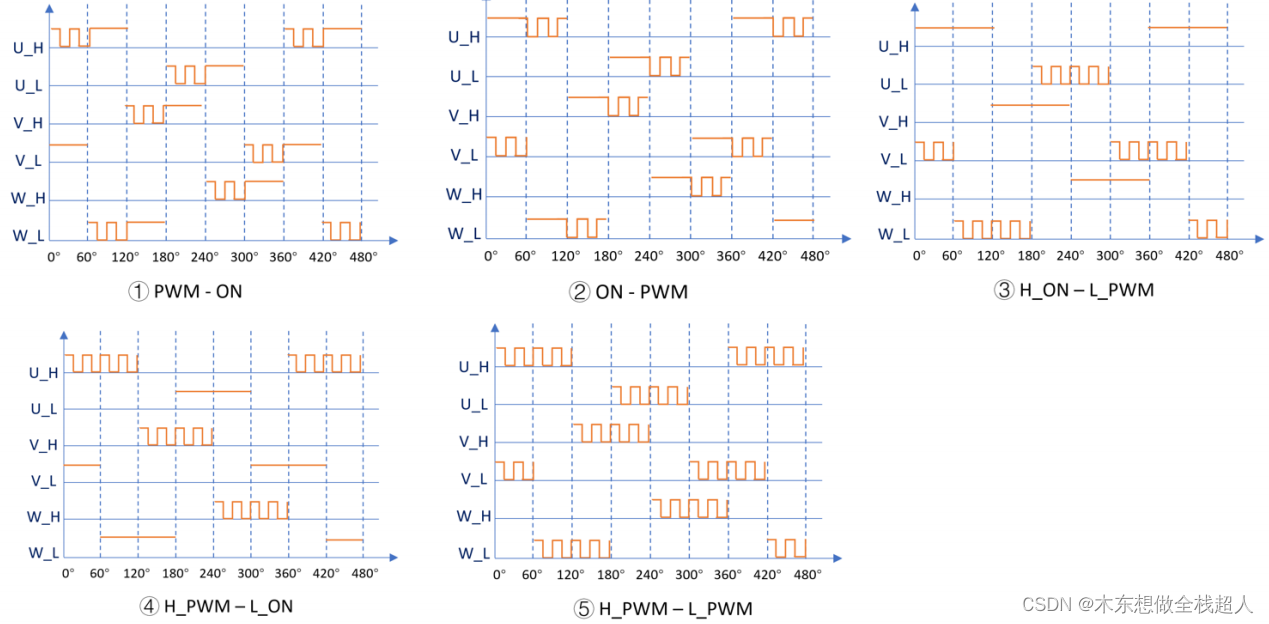
图 2.2.1 六步换相 以上图中(1)为例,U相与W相同时通电,由电磁感应,U相线圈可理解为磁铁正极,W相线圈可理解为磁铁负极,转子发生图示方向的转动。由此可推(2)到(6)的转子位置 依图,似乎可以推断,我们只需要按照图示换相的方式,交替向其中输入电平,似乎就可以达成换相,理论上确实使这样,但实际上,直接通入电流,会导致电机转速会骤升,加大丢步等问题发生的可能性,不利于控制。所以我们一般使用PWM波驱动电机,能够有效提升操作性 PWM波交替控制(PWM调制),一般有五种方式,如图 2.2.2:
图 2.2.2 PWM调制 此处我们使用第4种,即 H_PWM-L_ON 的驱动方式,驱动方式,将与驱动电路一起讲解 2.3 驱动电路图 2.3.1 是无刷电机的常见驱动电路简图(半桥驱动电路):
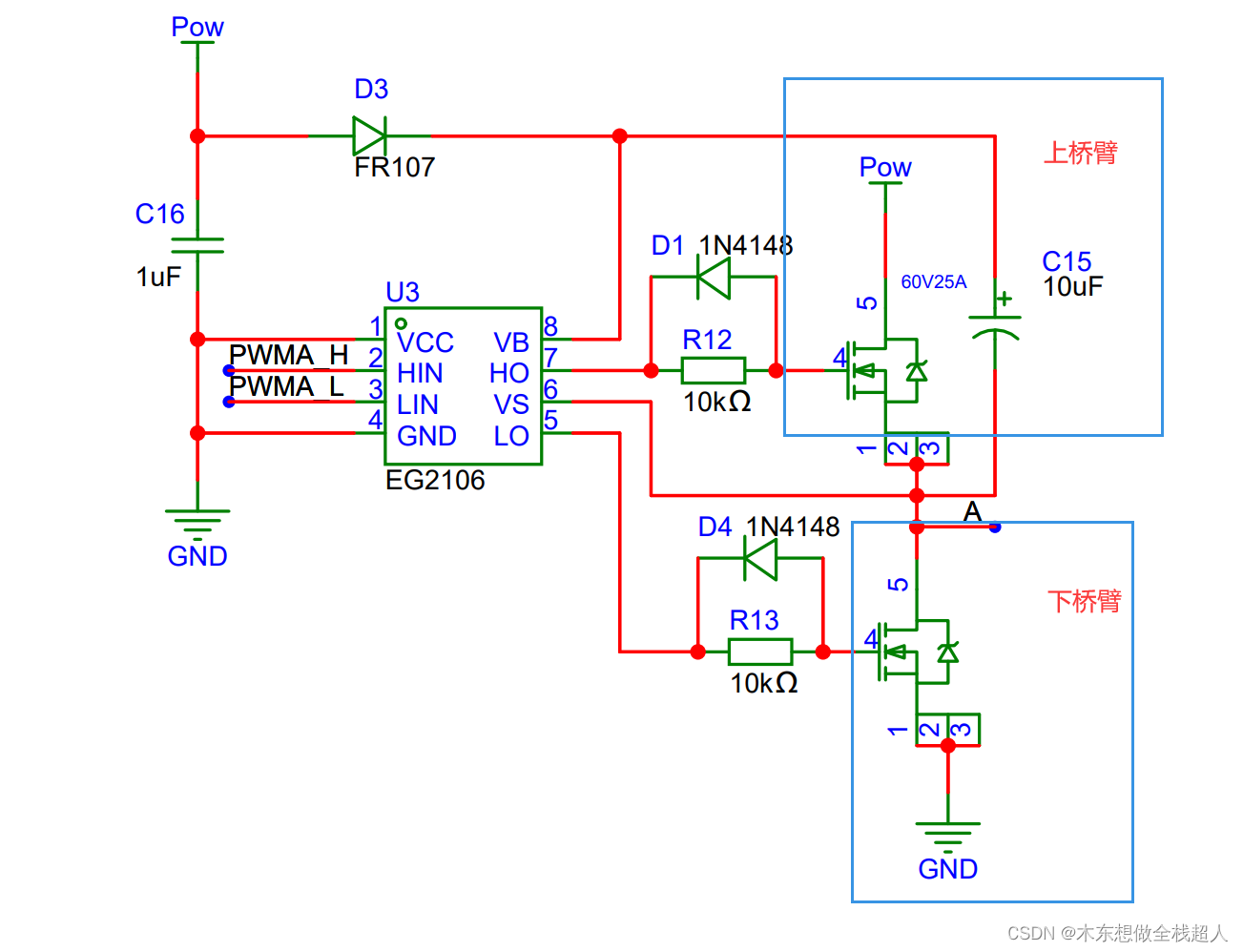
图 2.3.1 驱动电路换相 2.3.1 上下桥臂图2.3.2是单独一相的半桥电路:
图 2.3.2 半桥电路 如图可见,上桥臂连接正极,下桥臂接地,上桥臂MOS管导通(写1,如图2.2.2),高电平输入,下桥臂MOS管导通(写1,如图2.2.2),电平输出至地。 2.3.2 六步换相如图 2.3.1 所示,所谓H_PWM-L_ON 换相法(图 2.2.2 ),就是按照图 2.2.2 中4号表格内的电平高低写入对应的程序,其中,图 2.3.1 中上桥臂对应图 2.2.2 中X_H栏,下桥臂对应图 2.2.2 中X_L栏 以图 2.2.2 中H_PWM-L_ON 换相法的0°-60°电平为例。此时我们只需给U_H写入方波,给V_L持续1,就能控制电机旋转。 3. 结束语以上,便是本博客的全部内容,是否有一种“戛然而止”的感觉? 实际上,在了解换相原理后,我们尚且不能成功驱动无刷电机。想让无刷电机转起来,除了了解换相之外,还需要了解如何检测转子位置(不知道转子位置就不能知道什么时候该驱动那些桥臂)、无刷电机启动方式(尽管使用了PWM调制,无刷电机启动依然不能直接加电平,需要涉及到一个叫“外同步加速”的玩意),还有定时器的输出方式等 博主之后会持续更新上述内容,直到让无刷电机成功旋转,感兴趣的读者可以蹲一波~ 关注博主不迷路,祝大家项目顺利,天天开心! 博主前文指路: 四轴-无刷电机无感控制(BLDC)_无刷四轴和bldc-CSDN博客 电平输入检测-定时器输入捕获-CSDN博客 机器人是怎么计时的(通用定时器 - 时基单元)-CSDN博客 PWM波输出-定时器输出比较单元-CSDN博客 本文部分图片来源:正点原子,大疆 官网指路: 正点原子资料下载中心 — 正点原子资料下载中心 1.0.0 文档 (openedv.com) DJI 大疆创新 - 官方网站 |

【本文地址】