基于改进Canny算子的齿轮缺陷检测边缘检测算法* |
您所在的位置:网站首页 › 缺陷检测系统 › 基于改进Canny算子的齿轮缺陷检测边缘检测算法* |
基于改进Canny算子的齿轮缺陷检测边缘检测算法*
|
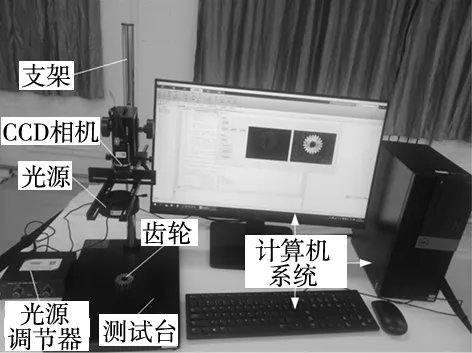
包从望,胡才梦,张彩红,林 良 (六盘水师范学院矿业与机械工程学院,六盘水 553000) 0 引言齿轮因其承载能力大、传动平稳且精度高的特点,已成为机械系统中的重要传动部件,被广泛用于矿山装备、航空、航海及工程机械等各种大型设备[1]。齿轮的精度直接影响到设备的运行性能,当齿轮出现缺陷时,将导致设备传动不平稳、传动效率低甚至牵连影响其它传动部件[2]。因此,齿轮的缺陷检测至关重要,传统人工检测、漏磁检测、超声波及激光检测方法存在一个共同弊端就是检测速度慢、精度低且容易出现漏检[3]。随数字化测量技术的发展,基于机器视觉的非接触检测技术在工业领域得到广泛应用。针对齿轮的视觉检测,吴小进等[4]基于机器视觉设计了齿轮的在线检测系统,实现齿轮图像的实时采集、分析及运行控制,根据齿轮外观图像判断齿轮的质量。郭忠峰等[5]基于灰度化、去噪处理、二值化等MATLAB图像处理方法,实现直齿圆柱齿轮的参数测量,并通过膨胀腐蚀的方法实现齿顶圆和齿根圆上边缘断点轮廓的链接。孔盛杰等[6]基于自适应阈值方法,对齿轮图像的亚像素角点进行检测,利用超最小二乘实现齿顶圆的拟合,基于机器视觉技术实现齿轮齿顶圆的检测。肖文韬等[7]结合改进的马氏距离公式实现齿轮图像的自适应中值滤波,以改进Retinex算法实现图像增强,并利用小波模极大值法实现含噪齿轮的边缘检测。TAO等[8]基于机器视觉检测系统,探讨了小模数齿轮的参数检测方法,通过对图像进行灰度变换、滤波、二值化及形态等一系列处理后获得齿轮的清晰轮廓,实现齿轮的缺陷检测。齿轮缺陷检测中最重要一步就是准确提取缺陷的边缘轮廓,图像边缘一般由不同灰度层次构成,常见边缘分割的算法有Prewitt、Robert、Sobel、Laplace、Log以及Canny等,Canny因其具有图像滤波、图像增强和边缘检测的多重功能,其应用广泛[9]。YU等[10]基于形态学的方式对Canny算法进行改进,在原有模板基础上加了45°和135°方向,通过形态学上的开闭运算,形成形态学滤波器,并将该滤波器代替高斯滤波,利用双边检测实现被测对象的边缘提取。黄梦涛等[11]利用双边滤波实现图像边缘的降噪,并利用多尺度细节增强算法实现图像低对比度的改善,利用最大熵和Otsu实现图像分割阈值的自动获取,改进的Canny算子具有良好的分割效果。齿轮缺陷边缘检测的众多研究中,虽有边缘分割前的降噪处理,但是降噪方法的鲁棒性并不高,且降噪过程中容易将边缘模糊,导致弱边缘漏检。 针对齿轮缺陷边缘检测中存在的问题,将双边滤波算法融入到传统MSR中,实现原图信息降噪的同时降低环境光照的影响,并通过拉氏锐化增强实现降噪后的图像增强,以灰度值统计方差作为高低阈值的确定依据实现阈值的自适应,利用改进的Canny算法实现齿轮缺陷检测的边缘提取。实验结果表明所提方法具有较好的降噪和保边效果,且能实现缺陷齿轮弱边缘的提取。 1 齿轮缺陷检测系统组成1.1 硬件系统齿轮缺陷检测系统如图1所示,由支架、CCD相机、光源、光源调节器和计算机系统组成。其中相机型号为MV-EM500C,分辨率为2592×1944的彩色相机,通过千兆网线与计算机相连,实现图像的实时传输、处理。计算机中基于OpenCV开发齿轮缺陷检测软件,实现缺陷轮廓信息的实时提取。
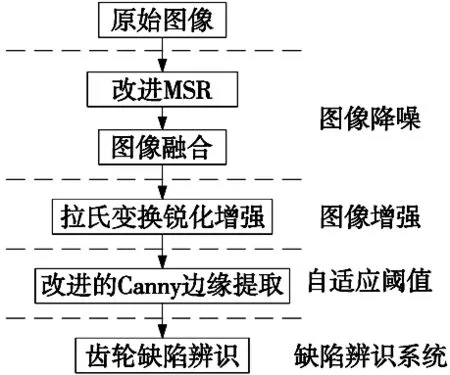
图1 齿轮缺陷检测系统 1.2 软件处理流程软件处理主要包含原始图像的采集、滤波降噪、图像增强、边缘提取及齿轮缺陷的辨识,其算法流程如图2所示。针对传统滤波降噪效果的不足,利用改进的MSR算法实现各个尺度下的图像降噪,并引入双边滤波,利用不同权值来实现各尺度下的图像降噪并融合。为进一步增强齿轮图像边缘信息,利用拉氏变换实现图像边缘的增强,最后基于改进的Canny算法,以自适应阈值实现齿轮边缘的提取。最后,在齿轮缺陷辨识系统中实现齿轮的缺陷检测。
图2 算法流程图 2 基于改进的MSR图像降噪2.1 Retinex算法原理Retinex理论是将图像分解为反射分量和环境光照分量,从而去除不同光照环境对图像采集的影响。其分解可表示为: I(x,y)=R(x,y)·L(x,y) (1) 式中,I(x,y)为相机采集到的图像信息;R(x,y)为被测物的实际图像信息;L(x,y)为环境光照分量。 分解的主要目的是获取目标物体的真实图像信息,即R(x,y)。为方便计算,将式(1)两边取对数后得式(2),算法的核心问题转换为求解L(x,y),通常可通过高斯核函数将原图像模糊化的结果表示为光照信息,如式(3) 所示,并将得到的结果量化在[0,255]期间,该方法即为单尺度下的Retinex理论(single scale retinex,SSR)。 log[R(x,y)]=log[I(x,y)]-log[L(x,y)] (2) L(x,y)=I(x,y)*G(x,y) (3) 式中,G(x,y)为高斯核函数;*为卷积运算。 因SSR选择的高斯核函数为单尺度,在实现图像降噪的同时也容易造成边缘被模糊化,传统MSR方法可利用大、中、小3尺度实现图像的动态压缩,且保留了边缘信息,MSR分解后的每个高斯模糊结果以不同权值叠加后结果如式(4)所示。
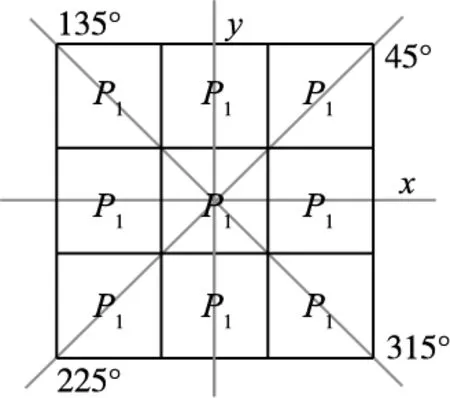
(4) 式中,n为尺度序号;ωn为第n项高斯核输出函数的权重;Gn(x,y)为该尺度下的高斯核函数,可表达为: (5) 式中,C为高斯模糊范围度量值;δn为尺度权值。 2.2 改进的MSR图像降噪传统的MSR算法采用高斯核作环境照射分量的估算函数,图像的滤波效果主要取决于尺度因子C的取值,经验值分别取高、中、低的值为120、80、15,该方法估算反射图像信息时容易将边缘模糊导致边缘丢失,且图像融合过程中易将噪声信号放大。 为能最大限度保留边缘信息,同时达到降噪效果,结合双边滤波较强的保边和降噪能力,将双边滤波引入到MSR算法中,双边滤波在估算欧氏距离的同时还将像素的范数阈值融入到滤波权值中,其计算如式(6)所示。 (6) 式中,f(k,l)为滤波前的像素值;g(x,y)为双边滤波的结果;ω(x,y,k,l)为根据像素特点计算的权值,其值由定义域核和值域核决定,计算如式(7)所示。 ω(x,y,k,l)=d(x,y,k,l)·r(x,y,k,l) (7) 式中,d(x,y,k,l)和r(x,y,k,l)分别为定义域核和值域核,具体计算如式(8)和式(9)所示。 (8) (9) 式中,σd为空间域的标准差;σr为值域标准差。 将双边滤波融入到MSR算法后可得到新的被测物图像信息,如式(10)所示,分别将式(4)和式(6)带入后即可算出被测物的真实图像。 log[R(x,y)]=log[g(x,y)]-log[L(x,y)] (10) 3 改进的Canny边缘检测算法3.1 传统Canny边缘检测算法常见的边缘提取算法有Roberts、Sobel、Log、Prewitt及Canny算子,因Canny算子具有信噪比大,边缘检测效果好的特点,应用较广泛。检测中主要包含高斯核降噪、梯度运算、梯度幅值的非极大值抑制、双阈值和边缘相连处理,其高斯滤波核可用式(5)计算。举例2×2领域幅值和梯度方向角的计算如式(11)和式(12)所示。 (11) θ=arctan(Gy(x,y)/Gx(x,y)) (12) 式中,Gx(x,y)和Gy(x,y)分别为水平方向和竖直方向针对x、y的导数。 获取图像像素梯度值及角度后利用梯度信息对图像中的冗余点与其相邻2个像素的值进行比较,若该值比周边值大,则保留,若小于周边值,则将该像素点抑制,即非极大值抑制。 最后,设定高、低阈值实现边缘提取,当像素点梯度值高于高阈值时将该点当作强边缘;若低于小阈值则为非边缘;若在高低阈值期间则看为弱边缘。 传统Canny算法采用高斯滤波过程中主要依赖高斯滤波权值,容易出现边缘点丢失或非目标值边缘化的两个极端;梯度计算仅有x、y两个方向,范围狭窄,容易导致边缘信息漏检;双阈值选取过程中,无法根据图像特征实现阈值自适应选择。 3.2 改进Canny边缘检测算法针对传统Canny边缘检测算法 的不足,首先利用拉氏变换锐化增强算法实现R(x,y)图像的边缘增强,因改进MSR中已利用双边滤波算法对图像进行滤波,改进Canny算法省去了高斯滤波,将增强后的图像结果作为Canny算子的输入。基于拉氏变换的锐化增强首先以拉氏算子将图像进行锐化,锐化后的图像与原图像融合,在保留原图像背景信息的同时使梯度突变处像素值得到增强。常用的两类算子如式(13)所示。 (13) 利用算子将原像素位置的值替换为计算值便可得到锐化增强后的边缘值,利用梯度计算将像素值的计算表述为: (14) 由式(15),根据梯度大小确定像素点是否被增强。 (15) 传统Canny算子的2×2领域仅计算了x、y方向上的梯度,容易出现边缘信息丢失的现象,将传统2×2领域扩充为3×3领域,由此在原有梯度方向的基础上增加45°、135°、225°和315°方向,如图3所示,此时像素点幅值由式(16)计算。
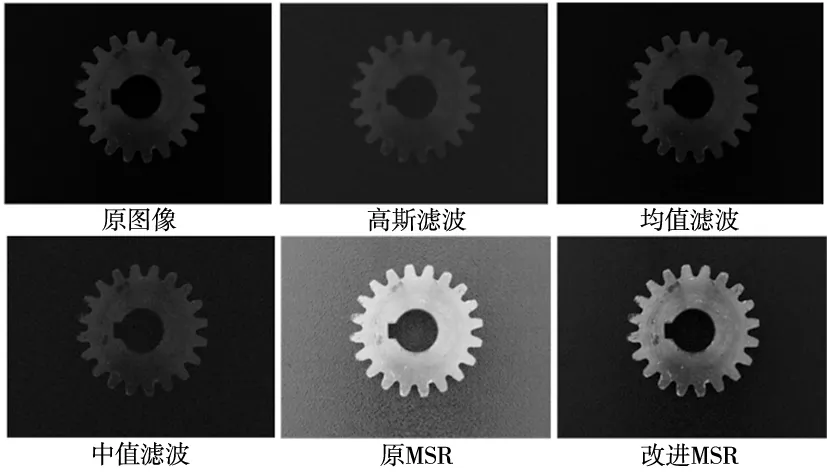
图3 3×3领域梯度表示 (16) 式中,m分别为x、y、45°、135°、225°和315°。 确定高低阈值时,传统Canny算法依赖于人工经验,该方法无法适应所有图片的边缘分割,文中依据灰度统计的方法选取高低阈值,实现阈值的自适应选择。将图像分为前景部分和背景部分,利用图像的方差信息说明两部分的可分离特性,方差的值越大则可分离性越好,首先假设高低阈值分别为Nl、Nh,则可图像可分为A1、A2、A33部分,即灰度值分别在[0,Nl]、[Nl+1,Nh]、[Nh+1,N],其中N为图像中的最大像素值。计算3部分类间的方差如式(17)所示。 (17) 式中,P1、P2、P3分别为3部分的灰度概率;u1、u2、u3分别为3部分的灰度均值。 3部分类间的方差最大值时对应的阈值边缘检测效果最好,即求解方差表达式的极大值时对应的Nl、Nh便为自适应阈值。 4 实验结果及分析为检测本文算法的有效性,选用Intel(R) i7-10750H [email protected] GHz,在Anaconda环境中借助Python图像处理库,利用图1中的齿轮缺陷检测系统分别验证改进后的MSR降噪效果及所提改进Canny边缘提取方法结果对比,为说明效果的优异性,实验过程中可以将采集系统的光照调至最暗。 4.1 改进MSR算法的降噪结果及分析将文中所提方法分别与经典高斯、均值、中值滤波算法和普通MSR算法进行比较,为进一步增强说服力,将原图像变换为800×600的图像。高斯、均值和中值滤波的权值范围均取为3,传统MSR和改进MSR对应的环绕尺度因子取为15、80、120,权值分别为0.33、0.33、0.34,如图4所示,分别为几种滤波降噪的效果。
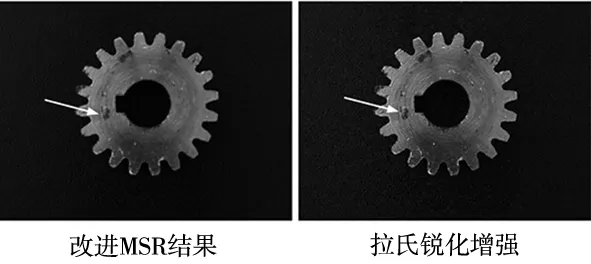
图4 齿轮图像滤波对比 由图可知,传统滤波方法均可得到不同程度的降噪,但效果并不明显,且都受到环境光照的影响,整体图像色彩偏暗,无法很好区分齿轮的边缘。基于Retinex原理可较好排除环境色彩的干扰,较好的还原图像本质。与原MSR算法相比,改进的MSR算法能更好的实现背景噪声的过滤,同时更真实的还原了齿轮的色彩图像,为实现图像分割奠定基础。 4.2 改进Canny算法的边缘检测为保证边缘提取的可靠性,边缘提取前先对改进MSR得到的结果进行拉氏锐化增强,如图5所示。
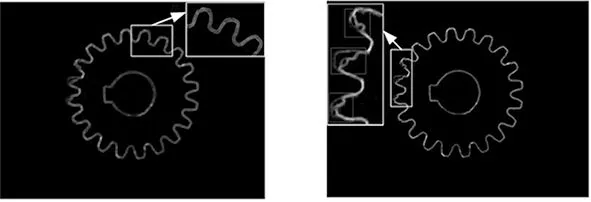
图5 拉氏锐化增强 明显看出齿轮轮廓的相关细节得到凸显,细节部分更加清晰。基于改进的MSR滤波图像,将增强后的图像分别用传统Canny、Otsu-Canny算子、未经锐化增强处理的边缘检测与所提方法对齿轮缺陷边缘检测的效果,如图6所示。
(a) 传统Canny检测 (b) Otsu-Canny检测
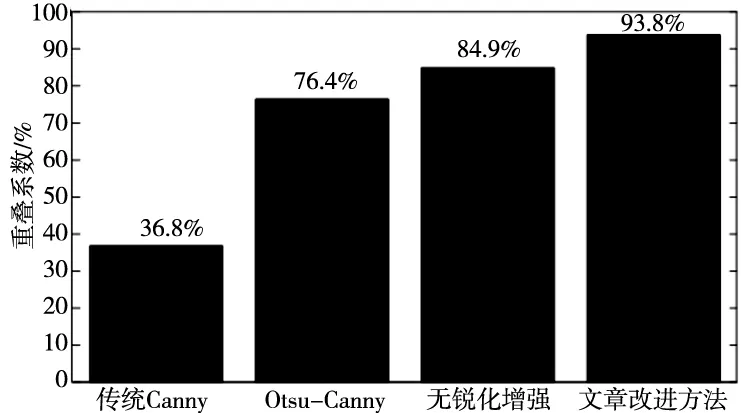
(c) 未经锐化处理的边缘检测 (d) 改进Canny检测图6 几种边缘检测结果比较 可看出,传统Canny算子很容易出现边缘漏检的情况,且被检测出的边缘强度较弱,边缘出现严重的不连续;Otsu-Canny检测在传统Canny的基础上边缘有所增强,但依然存在部分边缘丢失甚至边缘畸形的现象;与上述两种检测算子相比,所提改进方法在没有经过锐化处理时也能有较好的保边特性,但从所提取的边缘信息存在双重阴影,这给后续尺寸检测带来不便;利用改进后的Canny算法提取锐化增强后的边缘信息不仅有较好的视觉效果,而且边缘检测效果也优于其余方法,尤其是保边特性较为明显,如图所示,还能检测到部分弱边缘,即对齿轮的初期出现的微弱缺陷也有较好的检测效果。 为进一步以量化形式说明文中所提方法的有效性,以边缘的重叠系数Co作为量化参数分别比较几种方法的边缘与真实边缘的重叠系数大小,Co的计算如式(18)所示。 (18) 式中,Rseg、Rgt分别为样本图片标记的边缘和算法检测出的边缘。 图7为几种边缘检测方法对图片检测得到的重叠系数对比,由表中数据可知,所提方法得到的重叠系数明显高于其余方法,说明该方法可精确的用于齿轮缺编检测时的边缘提取。
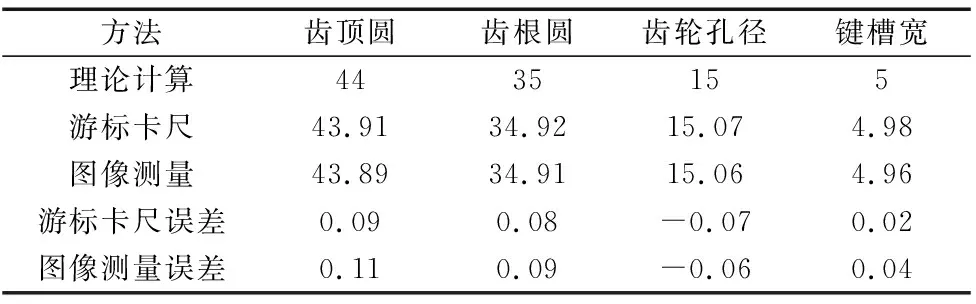
图7 方法重叠系数对比 为验证齿轮的缺陷检测精度,检测前将标定板(长×宽=10×10 mm)放置于与齿轮等高的水平面上,在相机参数不变的情况下,可计算出标定板图像中的像素尺寸对应的实际长度,由此建立图像尺寸与齿轮实际尺寸之间的尺寸关系。以分度圆直径为40 mm的标准直齿圆柱齿轮进行检测精度验证,对比理论计算值、游标卡尺测量值与图像测量值之间的测量结果如表1所示。
表1 测量尺寸精度对比 (mm) 由表可知,图像检测结果与理论计算之间最大绝对误差为0.11 mm,最小误差为0.04 mm,与游标卡尺的检测值接近,最大相差0.02 mm,最小为0.01 mm。考虑齿轮的加工误差,游标卡尺的测量值比理论计算值更接近真实尺寸,为此边缘检测得到的值满足齿轮缺陷检测精度需求。 5 结论针对齿轮缺陷检测过程中,因光照和噪声影响导致边缘漏检或者边缘冗余的问题,通过改进的MSR实现齿轮图像降噪,利用改进的Canny实现齿轮缺陷检测中的边缘提取。结论如下: (1)将双边滤波算法引入到MSR中代替原被测物图像,在保证降噪效果的同时不出现边缘漏检测的问题,结果表明,基于改进的MSR降噪效果明显优于传统高斯、中值、均值及改进前的MSR降噪滤波效果,改进的MSR能更好还原图像本质,降低环境光照对齿轮图像的影响,为后续图像边缘提取奠定基础; (2)引入拉氏变换锐化增强实现降噪后的图像增强,将原Canny算法中的2×2领域扩充为3×3领域,计算更多方向的边缘信息,根据灰度统计方法,计算阈值分割的几个部分,将各部分之间的方差最大时对应的阈值设定为分割阈值,实现阈值的自适应调整,省去了人工设定阈值的繁琐; (3)实验结果表明,改进算法能更好提取缺陷齿轮的边缘信息,具有较好的边缘完整性,且具有较高的检测精度。该方法为后续齿轮缺陷检测提供了齿轮的边缘信息,且可用在光线或噪声影响较大的应用场合。 猜你喜欢 高斯齿轮边缘 东升齿轮内燃机工程(2021年6期)2021-12-10你找到齿轮了吗?少儿科学周刊·少年版(2020年9期)2020-03-04异性齿轮大赏少儿科学周刊·少年版(2020年9期)2020-03-04数学王子高斯小天使·二年级语数英综合(2019年4期)2019-10-06天才数学家——高斯小学生学习指导(低年级)(2019年6期)2019-07-22齿轮传动制造技术与机床(2017年3期)2017-06-23一张图看懂边缘计算通信产业报(2016年44期)2017-03-13从自卑到自信 瑞恩·高斯林电影故事(2015年16期)2015-07-14在边缘寻找自我雕塑(1999年2期)1999-06-28走在边缘雕塑(1996年2期)1996-07-13
|


 组合机床与自动化加工技术2023年1期
组合机床与自动化加工技术2023年1期【本文地址】
今日新闻 |
推荐新闻 |