自动控制原理复习 |
您所在的位置:网站首页 › 系统框图简化例题 › 自动控制原理复习 |
自动控制原理复习
|
目录 1.拉普拉斯变换 1.1拉普拉斯变换的定义以及作用 1.2常见函数的拉普拉斯变换 1.3拉普拉斯变换的性质 1.4拉普拉斯变换在解微分方程中的应用 2.传递函数 2.1传递函数的定义 2.2传递函数的性质 2.3自动控制系统的基本环节及其传递函数 3.控制系统的框图 3.1控制系统框图的组成 3.2控制系统框图的等效变换和化简 3.3简化系统框图的解题方法 4.信号流图 4.1信号流图的组成与性质 4.2用梅森增益公式求系统的传递函数 5.闭环控制系统的传递函数 1.拉普拉斯变换 1.1拉普拉斯变换的定义以及作用 在时域里面研究系统的性质时常常会通过一个微分方程来描述系统的性质,当微分方程的阶数较小时,我们可以通过微积分运算来求解,但往往我们遇到的控制系统微分方程都较为复杂,通过复杂的微积分运算难以求得,而如果通过拉普拉斯变换将时域系统变换到复数域系统分析,仅仅需要通过简单的代数运算就能求得输出函数的复数域函数,再通过拉普拉斯逆变换就可以求得输出函数的时域形式。 1.1.1拉普拉斯变换的数学表达式 1.1.2拉普拉斯变换的存在条件 ①单位阶跃函数 ②单位斜坡函数 ③单位加速度函数 ④指数函数 ⑤正弦函数和余弦函数
利用拉普拉斯变换的微分性质: 求出F(s)后,再通过拉普拉斯逆变换求得f(t) 2.传递函数 2.1传递函数的定义设参考输入c(t),输出信号r(t): 则传递函数G(s)定义为: (1)线性定常系统传递函数是建立在复数域的数学模型,与时间域的数学模型线性定常系统微分方程对应。 (2)传递函数反映的是系统或者元件的性质,与输入信号的形式无关。 (3)传递函数与输入信号的作用位置和输出信号的取出位置有关。 (4)传递函数分子的根叫传递函数的零点,分母的根叫传递函数的极点。 (5)实际物理系统的传递函数分母的阶数永远高于或等于分子的阶数。 (6)传递函数不反映系统及元件的物理结构。 (7)令传递函数分母多项式N(s)=0得到系统的特征方程,特征方程的根叫做特征根。 (8)传递函数的拉普拉斯逆变换就是系统的单位脉冲响应。 2.3自动控制系统的基本环节及其传递函数(1)比例环节(放大环节) c(t)=Kr(t) G(s)=K 伺服系统中的绝大部分测量元件如电位器、旋转变压器、感应同步器等都可以看作是比例环节。 (2)惯性环节 其中T是惯性环节的时间常数。 (3)积分环节 (4)振荡环节 其中wn为无阻尼自振角频率, 否则系统的阶跃响应呈单调上升形式,不再振荡。 (5)纯微分环节 (6)一阶微分环节 (7)二阶微分环节 (8)延迟滞后环节 系统的框图由信号线、函数方框、比较点和引出点组成。 3.2控制系统框图的等效变换和化简3.2.1 串联环节的化简 3.2.2并联环节的化简
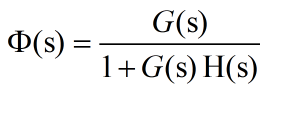
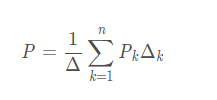
等效传递函数 3.2.3单回路反馈的化简 等效传递函数为 3.2.4比较点前移 3.2.5比较点之间移动 3.2.6引出点后移 3.2.7引出点之间移动 从一条信号流线上无论分出多少条信号线,他们都代表同一个信号,所以在一条信号线上的各引出点之间可以随意改变位置。 3.3简化系统框图的解题方法同类点向同类点方向移动,不同类点不可交换位置,变换前后各变量间的传递函数关系保持不变 4.信号流图 4.1信号流图的组成与性质信号流图是表示系统中各变量间相互关系以及信号传递过程的另一种图解方法。信号流图是由网络组成的,网络中的各节点用定向支线段连接,每一个节点表示一个系统变量,而每两个节点之间通过支路连接,信号只能单向流通,信号流的方向由支路上的箭头表示,用支路增益来表示两个标量的因果关系,标示在支路线上。 4.1.1信号流图的常见术语 (1)输入节点或源点——输入信号对应的节点,只有输出支路而没有输入支路 (2)输出节点或阱点——输出信号对应的节点,只有输入支路而没有输出支路 (3)通路——沿箭头所指方向穿过各相连支路的路径。 (4)不接触回路——没有任何公共节点的不同回路 (5)前向通路——从输入节点到输出节点的通路上,通过任何节点不多于一次。 (6)回路增益——回路中各支路增益的乘积。 4.1.2信号流图的性质 (1)信号流图只使用于线性系统 (2)支路表示一个信号对另一个信号的函数关系,信号只能沿着支路上的箭头方向传递 (3)在节点上可以把所有输入支路的信号叠加 (4)对于一个给定的系统,信号流图不是唯一的。 4.2用梅森增益公式求系统的传递函数4.2.1梅森增益公式——求系统的传递函数
5.闭环控制系统的传递函数
5.1系统的开环传递函数 主回路中前向通道的传递函数与反馈通路的传递函数的乘积,如图中的G1(s)G2(s)H(s) 5.2系统输入信号下的闭环传递函数 5.3系统扰动信号作用下的闭环传递函数 5.4系统的总输出 5.5偏差信号对于参考输入的闭环传递函数 5.6偏差信号对于扰动信号的闭环传递函数 5.7系统的总偏差 |




















【本文地址】