编程实战(4) |
您所在的位置:网站首页 › 类似2278游戏 › 编程实战(4) |
编程实战(4)
|
编程实战(4)——python识别图像中的坐标点并保存坐标数据
文章目录
编程实战(4)——python识别图像中的坐标点并保存坐标数据综述代码思路库的安装图片预处理图像细化图像二极化
提取数据结果展示和保存matplotlib重绘写入excel
全部源码
综述
最近因为美赛的需求,需要在提取一些赛道的路线图和地形图中的准确数据,因此对这方面做了一些了解。在研究的过程中,我发现网上的很多相关的帖子并不是很靠谱,不是报错就是没有说清楚一些函数的功能,所以我打算写一篇比较详细的文章。 本文主要讲述利用python接口的opencv来完成图像识别和信息提取并重新绘制、保存为excel数据的详细过程与思路,适合opencv方面的小白观看(需要一定的numpy和matplotlib基础)。如有一些疏漏,请大佬们指出~ 代码思路我会跟着我代码的思路逐一讲解每一步的思路和函数的一些解释; 总体思路如下: 第一:图片预处理,让图像二极化;第二:提取图片数据第三步:数据整理与保存 库的安装这里一共用了三个库 import cv2 import numpy as np import matplotlib.pyplot as pltnumpy和matplotlib的安装都比较常规,但是cv2的安装不是常规的pip install cv2,是opencv-python,国内镜像下载地址: pip3 install -i https://mirrors.aliyun.com/pypi/simple/ opencv-python 图片预处理 img = cv2.imread('你的图片路径') hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)首先打开图片,然后对图片做一个hsv灰度图的处理,因为我们常规的图片像素点都是rbg空间模式的,我们需要先转化为hsv颜色空间模式(没见过这个图像格式的可以百度一下),以便后面的图像二值化处理;
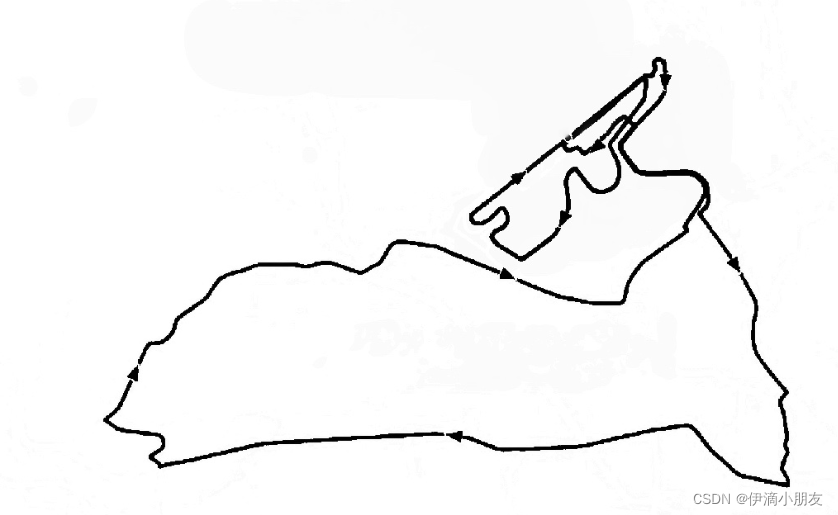
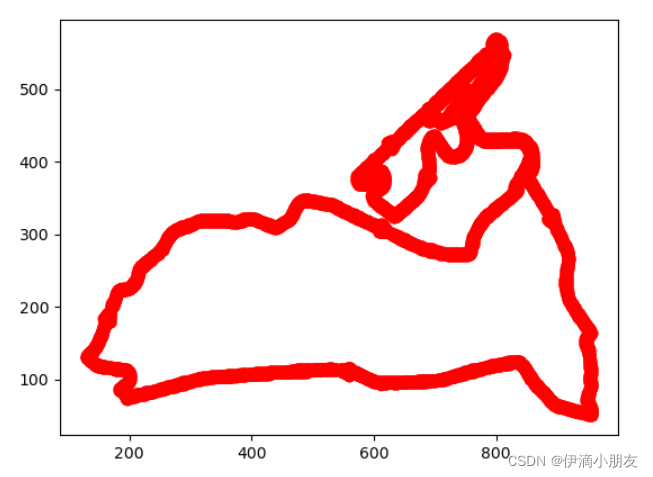
上面是我用到的图像,这是东京奥运会公路自行车比赛的路线图,我们要做的就是提取路线像素并坐标化; 图像细化如果说要处理的图像的线条很粗,那就会影响后面的识别过程,需要先进行图像细化;如果原本图的线条就很细(比如我的),那就可以跳过这一步。 图像细化我是直接参考一个博客的代码的,这里做一个引用:图像细化,骨架提取 写的相当棒,大家可以参考一下。 图像二极化这里我用到了一个cv库中的inRange函数,这个函数的功能是对读入的图像文件(即函数第一个参数)做一个二值化处理。 总的来说就是我们需要规定两个阈值lowerb和upperb,大于upperb和小于lowerb的图像像素点均会被转化为0(即黑色),在这个范围内的点被转化为255(白色); low_hsv = np.array([0, 0, 221]) high_hsv = np.array([180, 30, 255]) mask = cv2.inRange(hsv, lowerb=low_hsv, upperb=high_hsv)我们再来详细的讲一下这两个阈值,如果了解hsv颜色空间的话,很容易可以发现代码的前两行就是hsv颜色空间的两个值,numpy.array函数里面的参数刚好就是色调、饱和度和明度值,因为inRange函数的需要,我们要转化成numpy格式的数组。我这里需要提取所有黑色的坐标,所以设的是黑色与白色的阈值,大家可以根据自己的需求调整颜色阈值。 阈值参考:HSV基本颜色分量范围 这里的mask,就是我们需要提取数据的图像了~ 提取数据为了帮助大家理解,我们先打印看一下mask的具体情况: print(len(mask)) print(len(mask[0])) for i in range(len(mask)): print(mask[i])输出: 654 1024 [255 255 255 ... 255 255 255] [255 255 255 ... 255 255 255] ... [255 255 255 ... 255 255 255] [255 255 255 ... 255 255 255] [255 255 255 ... 255 255 255]可以看到图像是1024*654的,还有每一行的像素点都是一个numpy数组(numpy数组打印出来元素之间是没有用逗号间隔的),之前24位的hsv图,变成了8位的灰度图(每一项只有一个数据,而不是三个数组成的array); 我们要做的是要知道每一个黑色的像素点的横纵坐标,即在mask这个像素矩阵中,获取值为0的行号和列号。 方法也很简单,直接遍历每一个像素,找到值为0的像素点,存取列号和行号即可; list_y = [] list_x = [] for i in range(len(mask)): #print(mask[i]) xmax = [] for j in range(len(mask[i])): if mask[i][j] == 0: #print(mask[i][j],j,i) list_x.append(j) list_y.append(len(mask)-i)这里需要注意,很多图像存储数据是从下往上存储的,所以我们在获取列号的时候,需要用图像的高度减去mask的列号,才是真正的列号。 结果展示和保存 matplotlib重绘检验一下我们获取的图像数据,注意这里需要用散点图模式绘图,不然会有不太好的后果。。。 plt.plot(list_x, list_y, 'o', color='r') plt.show()结果如下:
可以发现提取效果还是不错的~~ 写入excel这一部分的说明直接放到注释里面了 import xlwt wb = xlwt.Workbook() ws = wb.add_sheet('sheet1') # 添加一个表 ws.write(0, 0, "x") # 写入数据,3个参数分别为行号,列号,和内容 ws.write(0, 1, "y") i = 1 #指针,每写一个数据,向下移动写指针一行 for x in list_x: ws.write(i, 0, x) i += 1 j = 1 for y in list_y: ws.write(j, 1, y) j += 1 wb.save('1111.xls')可以看到数据已经保存进excel里面了 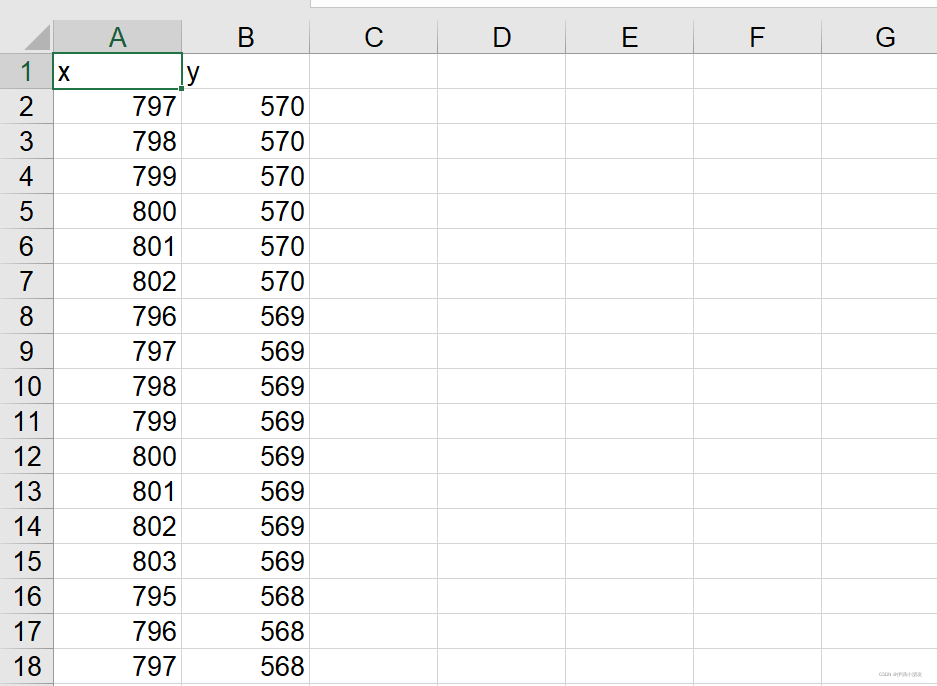
这一次提取其实还有一个小问题,就是相同的横坐标下还是有多个对应该横坐标的点,如果需要做函数分析之类的操作,我们可以直接用excel作按值分组然后去每组的特定值即可,最大值,平均值均可,看个人需求。 全部源码 import cv2 import numpy as np import matplotlib.pyplot as plt import xlwt img = cv2.imread('3.jpg') hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV) low_hsv = np.array([0, 0, 221]) high_hsv = np.array([180, 30, 255]) mask = cv2.inRange(hsv, lowerb=low_hsv, upperb=high_hsv) print(len(mask)) print(len(mask[0])) list_y = [] list_x = [] for i in range(len(mask)): print(mask[i]) xmax = [] for j in range(len(mask[i])): if mask[i][j] == 0: print(mask[i][j],j,i) list_x.append(j) list_y.append(len(mask)-i) plt.plot(list_x, list_y, 'o', color='r') plt.show() wb = xlwt.Workbook() ws = wb.add_sheet('sheet1') ws.write(0, 0, "x") ws.write(0, 1, "y") i = 1 for x in list_x: ws.write(i, 0, x) i += 1 j = 1 for y in list_y: ws.write(j, 1, y) j += 1 wb.save('1111.xls') |
【本文地址】
今日新闻 |
推荐新闻 |