从头到尾,详解S7 |
您所在的位置:网站首页 › 管道探测机器人接线图纸大全 › 从头到尾,详解S7 |
从头到尾,详解S7
|
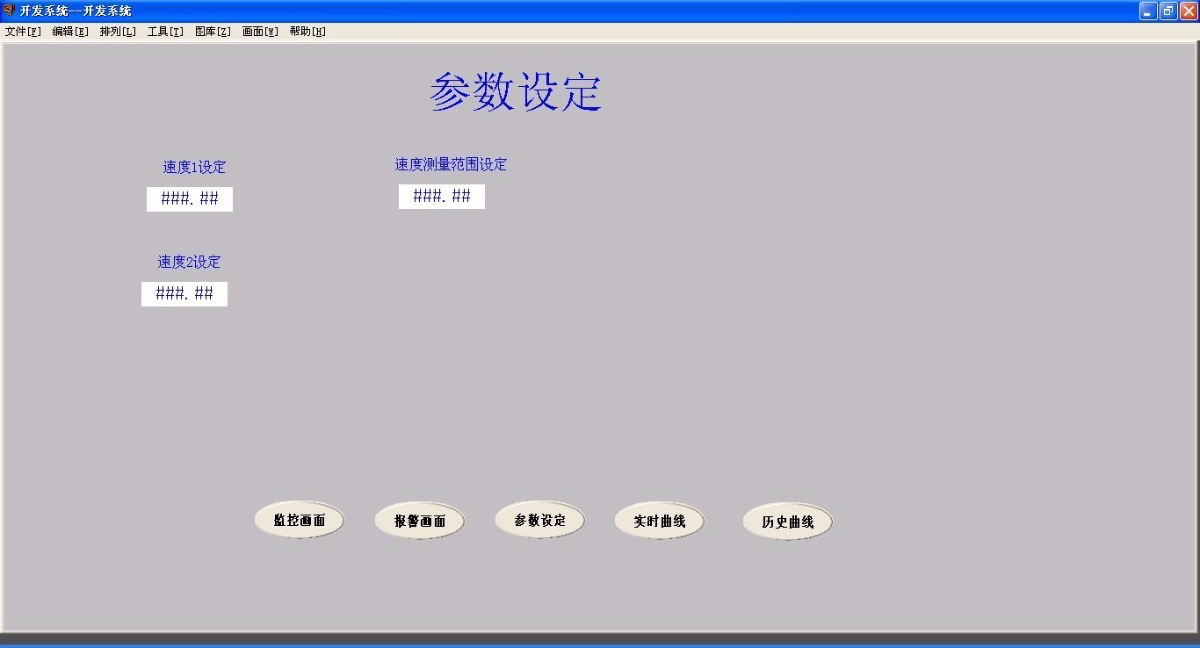
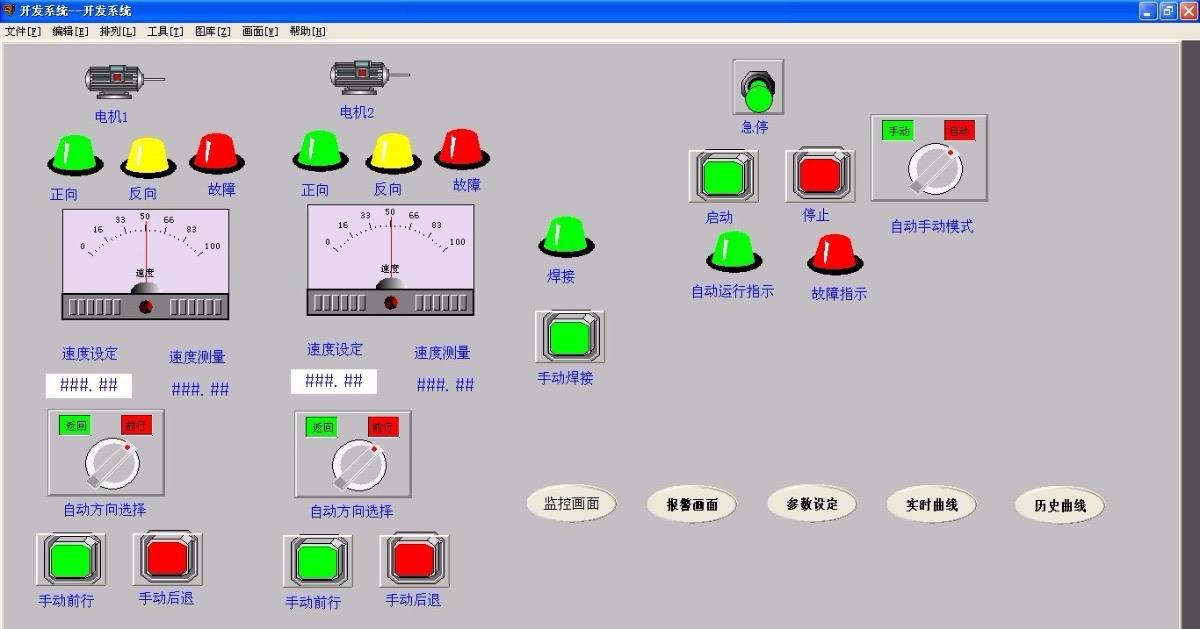
No.789 基于S7-200 PLC和组态王组态焊接机器人控制系 带解释的梯形图程序,接线图原理图图纸,io分配,组态画面 ID:1359674243451566 Holly123~ 文章主题:基于S7-200 PLC和组态王组态焊接机器人控制系统 摘要: 本文将围绕基于S7-200 PLC和组态王组态焊接机器人控制系统展开讨论和分析。首先,将介绍S7-200 PLC的特点及其在焊接机器人中的应用。然后,将详细解释梯形图程序的编写过程,并结合实际案例进行说明。接下来,将介绍接线图原理图图纸的设计原则和制作流程,以及IO分配的方法和策略。最后,将阐述组态画面的设计原则和注意事项,并通过实际案例展示优秀的组态画面设计。 关键词:S7-200 PLC,组态王,焊接机器人,梯形图程序,接线图原理图图纸,IO分配,组态画面 引言 S7-200 PLC作为一种常用的工业自动化控制设备,具有高性能、稳定可靠等特点,在焊接机器人中得到广泛应用。组态王作为一种灵活、易用的组态软件,为焊接机器人的控制系统提供了强大的支持。本文将重点探讨基于S7-200 PLC和组态王的焊接机器人控制系统的关键技术和实现方法。 S7-200 PLC在焊接机器人中的应用 S7-200 PLC作为焊接机器人的核心控制设备,具有多个模块化功能模块,能够灵活满足焊接机器人控制系统的需求。本章将详细介绍S7-200 PLC的特点和在焊接机器人中的应用案例,包括其在控制逻辑、数据处理和通信方面的优势。 梯形图程序的编写 梯形图程序是S7-200 PLC的编程语言,其编写过程关系到焊接机器人控制系统的正确运行。本章将详细讲解梯形图程序的编写方法,包括逻辑元件的选择和连接、变量的定义和使用,以及程序的调试和优化技巧。通过实际案例的讲解,读者可以更好地理解和掌握梯形图程序的编写技巧。 接线图原理图图纸的设计与制作 接线图原理图图纸是焊接机器人控制系统的重要组成部分,其设计和制作直接影响系统的可靠性和稳定性。本章将介绍接线图原理图图纸的设计原则和制作流程,包括线路图的绘制、元件的标注和连接、线束的规划和布局等。通过实际案例的演示,读者可以学习到优秀接线图原理图图纸的设计技巧。 IO分配的方法和策略 IO分配是焊接机器人控制系统中的重要环节,合理的IO分配能够提高系统的稳定性和可靠性。本章将介绍IO分配的方法和策略,包括IO模块的选择和布局、IO地址的分配和管理,以及安全控制和故障处理等方面的技术要点。通过实例分析,读者可以了解到IO分配的关键技术和实现方法。 组态画面的设计原则和注意事项 组态画面是焊接机器人控制系统中的用户界面,其设计直接影响用户对系统的操作和监控。本章将介绍组态画面的设计原则和注意事项,包括画面布局、控件选择和排列、颜色搭配和字体设计等方面的技术要点。通过实际案例的分析,读者可以学习到优秀组态画面设计的技巧和方法。 结论 本文基于S7-200 PLC和组态王组态焊接机器人控制系统,对其关键技术和实现方法进行了详细讨论和分析。通过对梯形图程序、接线图原理图图纸、IO分配和组态画面等方面的解析,读者可以更好地理解和掌握焊接机器人控制系统的设计和实现。最后,本文对未来的发展方向进行了展望,为读者提供了一些有益的思路和参考。 参考文献: [1] Siemens AG. S7-200 梯形图程序编程手册. [2] SCADA系统组态王使用手册. [3] 焊接机器人控制系统设计与实践. 相关的代码,程序地址如下:http://wekup.cn/674243451566.html |
【本文地址】
今日新闻 |
推荐新闻 |