【工业史记】一个关于我国第一台工业机器人的故事! |
您所在的位置:网站首页 › 第一台工业机器人诞生于哪个公司 › 【工业史记】一个关于我国第一台工业机器人的故事! |
【工业史记】一个关于我国第一台工业机器人的故事!
|
JSS-35型微机控制工业机器人样机
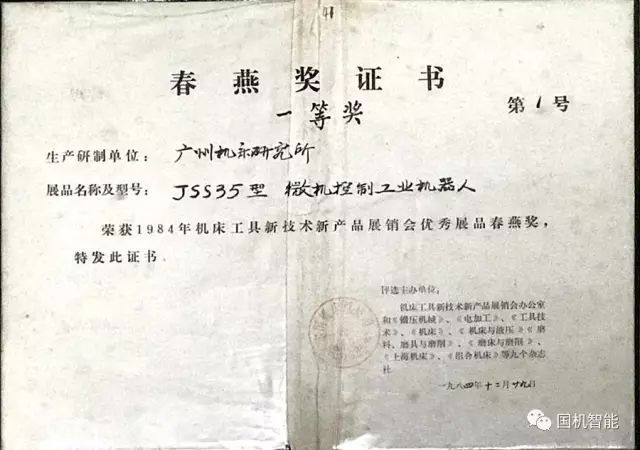
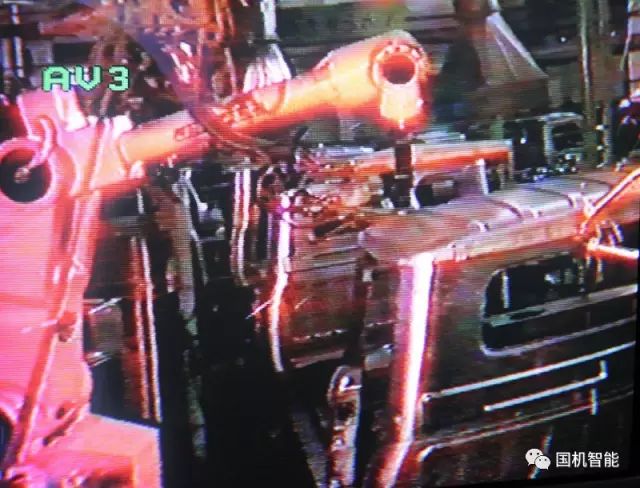
JSS35机器人进行汽车驾驶室点焊工艺试验 (1)JSS-35型工业机器人的研发纪事 1975年7月,机床研究室有关人员开始收集机械手或机器人的参数资料,并及时写出研究机械手及机器人的意见书上报所领导。副所长杨迈提出机床研究室以研究机械手或机器人为主; 1975年9月中旬,广东省科技局召开机械手及机器人研制座谈会,要求广研所写出规划; 1976年5月省科技局批准我所上报的机器人科研计划,并通过省一机局(省机械厅前身)给广研所下达机器人科研经费4万元; 1976年3月,我国第一台自行设计的微机控制示教再现型工业机器人JSS35(也称通用机械手)开始在广研所投料加工; 1977年9月中旬,JSS35工业机器人开始机电联调试验; 1983年底进行技术鉴定; 1983年12月29日,广州电视台派人来我所拍机器人表演专题片; 1984年开始在研制成的JSS35示教再现机器人上装上点焊设备进行汽车驾驶室点焊工艺试验; 1984年12月该机器人在机械工业部新技术新产品展销会上获得优秀产品“春燕”一等奖; 1987年4月开始,JSS35机器人在湖北十堰第二汽车制造厂车身分厂试用。 1975年7月,机床研究室有关人员开始收集机械手或机器人的参数资料,并及时写出研究机械手及机器人的意见书上报所领导。副所长杨迈提出机床研究室以研究机械手或机器人为主; 1975年9月中旬,广东省科技局召开机械手及机器人研制座谈会,要求广研所写出规划; 1976年5月省科技局批准我所上报的机器人科研计划,并通过省一机局(省机械厅前身)给广研所下达机器人科研经费4万元; 1976年3月,我国第一台自行设计的微机控制示教再现型工业机器人JSS35(也称通用机械手)开始在广研所投料加工; 1977年9月中旬,JSS35工业机器人开始机电联调试验; 1983年底进行技术鉴定; 1983年12月29日,广州电视台派人来我所拍机器人表演专题片; 1984年开始在研制成的JSS35示教再现机器人上装上点焊设备进行汽车驾驶室点焊工艺试验; 1984年12月该机器人在机械工业部新技术新产品展销会上获得优秀产品“春燕”一等奖; 1987年4月开始,JSS35机器人在湖北十堰第二汽车制造厂车身分厂试用。 (2)JSS-35型工业机器人的总体设计情况 1977年在没有进口样机,没有完整的参数资料的情况下,广研院自行设计与研制JSS35工业机器人,在研制过程中虽然也走过一些弯路,但从总体设计来看,基本上是成功的。当时国内有若干单位曾经研制过类似的工业机器人,但由于设计结构、制造工艺等方面的原因,未能最终成功。我们在设计之前曾吸取了兄弟单位的经验教训,例如:为了减少机器人的运动惯量、手臂支座采用铝合金铸造;为减少摩擦力提高动作灵敏度与使用寿命、手臂伸缩传动采用滚动花键而没有采用滑动花键;为保证机器人运动稳定性,臂回转运动没有采用回转油缸而采用直线油缸通过齿条齿轮来实现,这是因为回转油缸制造工艺难以保证配合间隙而往往存在内泄漏而影响机器人的正常运转,伸缩臂轴钢丝绳传动编码器,容易打滑,我们改为齿形皮带传动,提高了可靠性,臂俯仰轴靠垂直液压油缸传动,原设计没有液压锁定,若操作时突然停电,手臂急剧下垂,比较危险,后采用双液控单向阀,基本上解决了问题。此外,为了提高液压伺服系统的可靠性,我们采用了全封闭式独立油箱。 上述这些改进都达到了预期效果。JSS35机器人在设计结构及制造工艺上也还存在一些不足之外。例如总体设计时及在研制过程中没有对机器人运动部件的惯量及频响等进行分析或测定,对机器人的系统误差缺乏分析。某些关键传动齿轮(臂回转齿轮及手腕回转锥齿轮)的制造精度欠佳,直接影响到机器人手部的定位精度(因该机器人是半闭环控制,手部的机械误差或齿隙误差等无法进行控制)这些在以后研制与开发机器人时应该考虑改进。 (3)JSS-35型工业机器人关键元器件的研制及选用 对于具有位置反馈的液压伺服型机器人来说,关键元器件有两个,即电液伺服阀和光电编码器。在研制机器人过程中,在选用伺服阀方面走过一些弯路。曾经先后试用过两种伺服阀,一种是喷咀挡板式电液伺服阀,一种是动圈滑阀式电液伺服阀。前者频响高,动态性能好,可用于快速响应且线性要求高的闭环控制系统。但这种伺服阀对油液过滤精度要求较高,对油温变化比较敏感,动圈滑阀式电液伺服阀频响较低,动态响应较慢,但对油液的过滤精度的要求低于喷咀挡板式伺服阀,对油温变化的敏感度也稍低。结合本机器人的动态特性,要求机器人起停时有一空死区(滞后)。经过反复试验,最后还是采用动圈式伺服阀。此外,伺服阀阀芯窗口形状及遮盖情况也影响到机器人的起停特性。反复试验表明:正遮盖负开口的伺服阀为最佳。与伺服阀匹配使用的伺服放大器的质量也是保证伺服系统正常工作所必不可少的。 正确选择优质的位置检测元件,也是保证伺服系统稳定性的必要条件之一。在研制机器人初期,在国内买不到合适的光电编码器,从国外进口又较困难,决定参考国外资料自行研制。花了不到1年时间研制出13位光电编码器的试验样品。经试验可以输出格雷码,但不稳定。经反复试验与分析研究,发现不稳定的主要原因是编码器的元器件质量差而造成的。例如光敏元件、电子元件、光源灯泡、齿轮精度、零件制造及装配精度等都直接影响到工作的稳定性与可靠性。最后在1982年从西德进口13位光电编码器,才解决了问题。 (4)JSS-35型工业机器人在第二汽车制造厂车身焊接生产线上得到应用 我所研制的示教再现型工业机器人JSS35型是通用型的工业机器人,可用于工件上下料、搬运等。装上不同专用工具可用于焊接、喷漆及打磨毛刺等。根据不同使用场合,对机器人的结构性能、控制系统等方面都会提出一些不同的要求。我所研制的JSS35示教机器人用于第二汽车制造厂车身分厂点焊作业,对于点焊机器人来说,由于焊接作业是在大电流强干扰的条件下进行的,因此对点焊机器人除要求刚性好、高速准确外,特别要求控制系统具有较好的抗干扰能力。此外还须对点焊设备及点焊工艺等有所了解。这就要求机器人设计制造单位在研制机器人及试验过程中,必须同用户紧密结合,充分了解工艺流程。根据工艺要求不断改进与完善机器人的结构性能。由于我所研究人员在研制机器人过程中与二汽车身厂有关技术人员和工人师傅紧密配合、互相协作、反复试验、不断改进,终于研制成功我国用微机控制的第一台示教再现机器人,并在二汽生产车间试用。 媒体报道及获奖情况: 1983年12月29日 《广州日报》 《机器人表演目击记》 1984年01月03日《香港大公报》《国产机器人显身手》 1984年12月在机械工业部新技术新产品展销会上获得优秀产品“春燕”一等奖
JSS-35型工业机器人媒体报道及获奖证书 二、 JRS-80点焊机器人
JRS-80点焊机器人样机
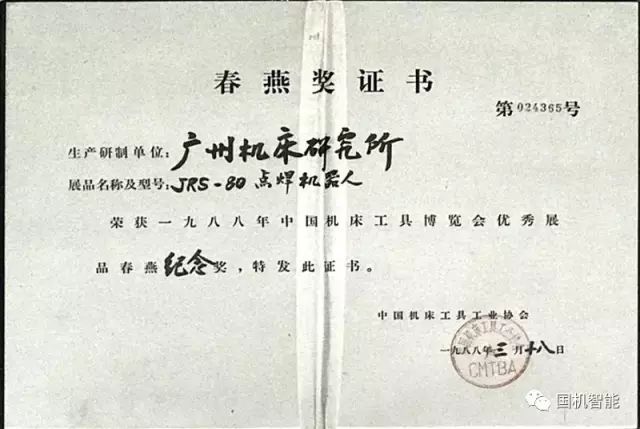
JRS-80点焊机器人在一汽车身生产线上的应用 (1)JRS-80点焊机器人的研制及应用情况 在20世纪80年代后期研制的JRS-80点焊机器人,最大负荷80kg,是关节座标式示教再现型,有6个自由度,用直流伺服电动机驱动(带光电编码器、测速发电机及制动器,有位置反馈与速度反馈)。通过谐波减速器与滚动丝杠传动。该机器人负荷能力及动作范围较大,手腕端部的最大回转半径为2.5 m(不包括焊轮),特别适用于点焊汽车车身等工件。既可以减轻工人劳动强度,又能保证产品质量。广州机床研究所在1986年被确定为国家“七五”科技攻关《机器人开发研究项目》中点焊机器人相关任务的承担单位,并与国家机械委正式签订了“点焊机器人技术开发”专项合同。在机电部科技司主持下,专家鉴定委员会于1991年3月对该项目进行了技术鉴定并通过鉴定。 JRS-80点焊机器人是在参考进口样机的基础上自行设计研制而成。由广州机床研究所完成机器人本体研制,协作单位有北京科技大学、华南理工大学、北京航空航天大学、东南大学、沈阳自动化所、西安微电机研究所、洛阳轴承研究所、北京谐波传动研究所。广州机床研究所参与研究人员有王嘉岐、梁仲乾、陈成国等共29名科研人员。 1987年4月完成图纸设计,9月底完成全部零件加工。机器人机械本体在研究所附属工厂加工制造(包括铸造及机加工),个别零件委托外协加工。11月开始机由联调,经试验与测试对比,JRS-80点焊机器人的各项技术指标均达到了国外80年代中期同类产品的技术水平。1988年在北京中国机床工具博览会上展出的第一台JRS-80点焊机器人,采用进口控制机及关键元器件(包括电机、谐波减速器、薄壁轴承等)。根据“七五”相关计划,点焊机器人控制器及关键元器件的国产化工作,国家机械委作了安排,1989年试制的第二台样机,采用了国产控制器及国产元器件(包括焊接设备),到1990年,完成了JRS-80点焊机器人国产化,该机器人是我国第一台全部国产化的大型机器人。于1991年3月在北京科技大学正式通过专家鉴定和验收(见1991年3月《科技日报》、《人民日报》、《南方日报》的相关报道)。 按计划,JRS-80点焊机器人在1989年还将投产3台。在北京展出的第一台样机展出后即运往长春第一汽车制造厂试用。一汽在1989年上半年之前又向我所购买两台JRS-80点焊机器人。另外,湖北第二汽车厂、南京汽车厂及北京汽车厂等也对JRS-80点焊机器人很感兴趣。据广研院前二室参加研制和现场调试的工程师林茂源回忆, JRS-80点焊机器人共生产了5台,有2台在一汽卡车厂应用,另2台在沈阳金杯应用,用于卡车驾驶室点焊作业,驾驶室在流水线上,两台机器人左右布局,配合完成驾驶室顶棚四周点焊作业。最后1台留在广研院第二研究室。后来研制的JRSH-01是为万宝冰箱厂开发的。 (2)媒体报道及获奖情况 1988年3月18日在中国机床工具博览会上获得优秀展品“春燕”奖 1988年12月13日在《广州市引进技术、设备消化创新成果展览会》上获奖 1990年11月14日在第二届全国新技术新产品展销会上荣获优秀奖 1991年3月通过了机电部科技司组织的“七五”科技攻关项目鉴定 1991年3月18日《科技日报》 《第一台国产大型工业机器人诞生》 1991年3月20日《人民日报》 《“点焊机器人“最近通过国家鉴定》 1991年3月20日《南方日报》 《我国首台点焊机器人问世》 1991年8月22日《人民日报》 《“七五”科技攻关成果展开幕》 1991年8月24日《中国科技市场报》《国家“七五“科技攻关成果展览会巡礼》 1991年8月28日《人民日报》 报导了“七五”科技攻关成果JRS-80点焊机器人 1991年9月12日《中国机电报》《国家“七五”科技攻关成果展览会机电馆巡礼》 1988年3月18日在中国机床工具博览会上获得优秀展品“春燕”奖 1988年12月13日在《广州市引进技术、设备消化创新成果展览会》上获奖 1990年11月14日在第二届全国新技术新产品展销会上荣获优秀奖 1991年3月通过了机电部科技司组织的“七五”科技攻关项目鉴定 1991年3月18日《科技日报》 《第一台国产大型工业机器人诞生》 1991年3月20日《人民日报》 《“点焊机器人“最近通过国家鉴定》 1991年3月20日《南方日报》 《我国首台点焊机器人问世》 1991年8月22日《人民日报》 《“七五”科技攻关成果展开幕》 1991年8月24日《中国科技市场报》《国家“七五“科技攻关成果展览会巡礼》 1991年8月28日《人民日报》 报导了“七五”科技攻关成果JRS-80点焊机器人 1991年9月12日《中国机电报》《国家“七五”科技攻关成果展览会机电馆巡礼》
JRS-80点焊机器人获奖证书 免责声明:本文系网络转载,版权归原作者所有。如涉及版权,请联系删除!文中内容仅代表作者个人观点,转载不同于本平台认同或者持有相同观点。返回搜狐,查看更多 |


【本文地址】
今日新闻 |
推荐新闻 |