创意笔筒 设计说明书 |
您所在的位置:网站首页 › 笔筒设计简图 › 创意笔筒 设计说明书 |
创意笔筒 设计说明书
|
创意笔筒 设计说明书
时间:2024.5.13
创意笔筒 设计说明书---- 笔的图书馆 材料: 1、几块木板 2、装饰物、卡纸、剪刀、胶棒。 笔筒说明: 1、 笔筒正中间,可以贴你喜欢的学习计划。旁边还 可加上一些励志的名人名言。 2、 笔筒左边是用卡纸围成的小方筒,可以贴你的大 头贴。 3、 木板笔筒中可以放一些笔、尺子、胶带。 4、 卡纸笔筒可以放一些橡皮和小玩件。 笔筒装饰:1、在木板笔筒的笔口下方一点系上蝴蝶结丝带。 2、笔筒四周贴一些晶晶。 3、卡纸笔筒可以剪出几个小孔,清新透亮。 4、可以贴一行卡片。 六年七班 李姿儒 刘彦妤 第二篇:创新设计说明书一、抓取机构设计 手部设计计算 一、对手部设计的要求 1、有适当的夹紧力 手部在工作时,应具有适当的夹紧力,以保证夹持稳定可靠,变形小,且不损坏工件的已加工表面。对于刚性很差的工件夹紧力大小应该设计得可以调节,对于笨重的工件应考虑采用自锁安全装置。 2、有足够的开闭范围 夹持类手部的手指都有张开和闭合装置。工作时,一个手指开闭位置以最大变化量称为开闭范围。对于回转型手部手指开闭范围,可用开闭角和手指夹紧端长度表示。手指开闭范围的要求与许多因素有关,如工件的形状和尺寸,手指的形状和尺寸,一般来说,如工作环境许可,开闭范围大一些较好,如图所示。
机械手开闭示例简图 3、力求结构简单,重量轻,体积小 手部处于腕部的最前端,工作时运动状态多变,其结构,重量和体积直接影响整个机械手的结构,抓重,定位精度,运动速度等性能。因此,在设计手部时,必须力求结构简单,重量轻,体积小。 4、手指应有一定的强度和刚度 5、其它要求 因此送料,夹紧机械手,根据工件的形状,采用最常用的外卡式两指钳爪,夹紧方式用常闭史弹簧夹紧,松开时,用单作用式液压缸。此种结构较为简单,制造方便。 二、拉紧装置原理 如图所示:油缸右腔停止进油时,弹簧力夹紧工件,油缸右腔进油时松开工件。 
油缸示意图 1、右腔推力为 FP=(π/4)D²P =(π/4) =4908.7N 2、根据钳爪夹持的方位,查出当量夹紧力计算公式为: F1=(2b/a) 其中 N′=4 F1=(2b/a) =(2 =1764N 则实际加紧力为 F1实际=PK1K2/η =1764 经圆整F1=3500N 3、计算手部活塞杆行程长L,即 L=(D/2)tgψ =25×tg30º =23.1mm 经圆整取l=25mm 4、确定“V”型钳爪的L、β。 取L/Rcp=3 式中: Rcp=P/4=200/4=50 由公式得:L=3×Rcp=150 取“V”型钳口的夹角2α=120º,则偏转角β按最佳偏转角来确定, 查表得: β=22º39′ 5、机械运动范围(速度)【1】 (1)伸缩运动 Vmax=500mm/s Vmin=50mm/s (2)上升运动 Vmax=500mm/s Vmin=40mm/s (3)下降Vmax=800mm/s Vmin=80mm/s (4)回转Wmax=90º/s Wmin=30º/s 所以取手部驱动活塞速度V=60mm/s 6、手部右腔流量 Q=sv =60πr² =60×3.14×25² =1177.5mm³/s 7、手部工作压强 P= F1/S =3500/1962.5=1.78Mpa 腕部设计计算 腕部是联结手部和臂部的部件,腕部运动主要用来改变被夹物体的方位,它动作灵活,转动惯性小。本课题腕部具有回转这一个自由度,可采用具有一个活动度的回转缸驱动的腕部结构。 要求:回转±90º 角速度W=45º/s 以最大负荷计算: 当工件处于水平位置时,摆动缸的工件扭矩最大,采用估算法,工件重10kg,长度l=650mm。如图所示。 1、计算扭矩M1〖4〗 设重力集中于离手指中心200mm处,即扭矩M1为: M1=F×S =10×9.8×0.2=19.6(N·M) 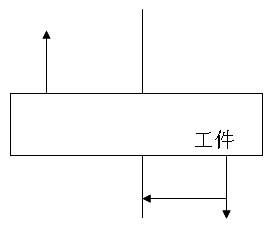

腕部受力简图 2、油缸(伸缩)及其配件的估算扭矩M2〖4〗 F=5kg S=10cm 带入公式2.9得 M2=F×S=5×9.8×0.1 =4.9(N·M) 3、摆动缸的摩擦力矩M摩〖4〗 F摩=300(N)(估算值) S=20mm (估算值) M摩=F摩×S=6(N·M) 4、摆动缸的总摩擦力矩M〖4〗 M=M1+M2+M摩 =30.5(N·M) 5.由公式 T=P×b(ΦA1²-Φmm²)×106/8 其中: b―叶片密度,这里取b=3cm; ΦA1―摆动缸内径, 这里取ΦA1=10cm; Φmm―转轴直径, 这里取Φmm=3cm。 所以代入公式 P=8T/b(ΦA1²-Φmm²)×106 =8×30.5/0.03×(0.1²-0.03²)×106 =0.89Mpa 又因为 W=8Q/(ΦA1²-Φmm²)b 所以 Q=W(ΦA1²-Φmm²)b/8 =(π/4)(0.1²-0.03²)×0.03/8 =0.27×10-4m³/s =27ml/s 臂伸缩机构设计 手臂是机械手的主要执行部件。它的作用是支撑腕部和手部,并带动它们在空间运动。 臂部运动的目的,一般是把手部送达空间运动范围内的任意点上,从臂部的受力情况看,它在工作中即直接承受着腕部、手部和工件的动、静载荷,而且自身运动又较多,故受力较复杂。 机械手的精度最终集中在反映在手部的位置精度上。所以在选择合适的导向装置和定位方式就显得尤其重要了。 手臂的伸缩速度为200m/s 行程L=500mm 1、手臂右腔流量,公式得:【4】 Q=sv =200×π×40² =1004800mm³/s =0.1/10²m³/s =1000ml/s 2、手臂右腔工作压力,公式得:〖4〗 P=F/S 式中:F――取工件重和手臂活动部件总重,估算 F=10+20=30kg, F摩=1000N。 所以代入公式得: P=(F+ F摩)/S =(30×9.8+1000)/π×40² =0.26Mpa 3、绘制机构工作参数表如图所示:
机构工作参数表 4、由初步计算选液压泵〖4〗 所需液压最高压力 P=1.78Mpa 所需液压最大流量 Q=1000ml/s 选取CB-D型液压泵(齿轮泵) 此泵工作压力为10Mpa,转速为1800r/min,工作流量Q在32―70ml/r之间,可以满足需要。 5、验算腕部摆动缸: T=PD(ΦA1²-Φmm²)ηm×106/8 W=8θηv/(ΦA1²-Φmm²)b 式中:Ηm―机械效率取: 0.85~0.9 Ηv―容积效率取: 0.7~0.95 所以代入公式得: T=0.89×0.03×(0.1²-0.03²)×0.85×106/8 =25.8(N·M) T |

 0.5²
0.5² F
F S
S F
F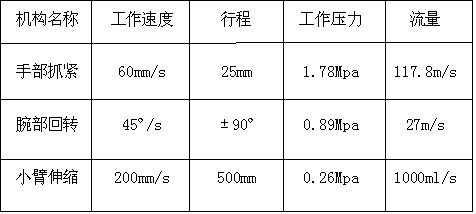
【本文地址】
今日新闻 |
推荐新闻 |