穿越机 地面站调参详解 DF创客社区 |
您所在的位置:网站首页 › 穿越机遥控器设置教程图解视频 › 穿越机 地面站调参详解 DF创客社区 |
穿越机 地面站调参详解 DF创客社区
|
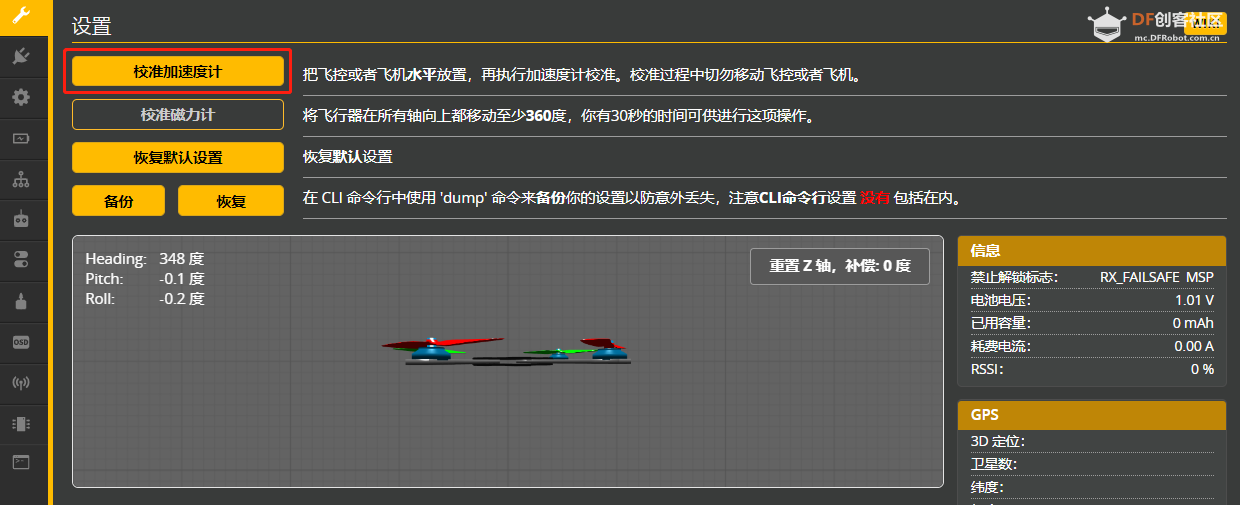
调参完成后,可以通过简单的目视飞行来测试动力系统和遥控系统。穿越机暴走危险性极大,轻则击碎电脑屏幕,重则割破皮肤甚至毁容,在上电之前请明确以下事项: 注意:确保在连接电池前充分阅读了前面的所有教程以及安全事项,熟练掌握目视定高飞行。 注意:在穿越机上电并连接电脑之前卸下所有桨叶。防止在调试时暴走。 接下来我们将按照地面站左侧选项卡从上往下的顺序依次配置: 机身调平调平的步骤能让飞机在自稳模式下时刻保持水平的悬停姿态。飞机如果没有调平,在悬停时将发生持续的偏移。 调平过程很简单,将飞机在水平桌面上平稳放置后,单击校准加速度计即可重置水平位置。校准会持续一秒,期间不要移动飞机。
遥控接收机接口:根据接收机的接线,将对应UART端口的串行数字接收机开关打开。 例:下图中遥控接收器连接至UART1(TX1 / RX1)串口,所以在BF中打开UART1的数字接收机开关即可。
图传调参口:根据图传的接线,在外设下拉菜单中选择对应的图传型号。 例:下图中图传芯片连接至UART3(TX3 / RX3)串口,所以在BF中UART4的外设下拉菜单选择对应的图传。
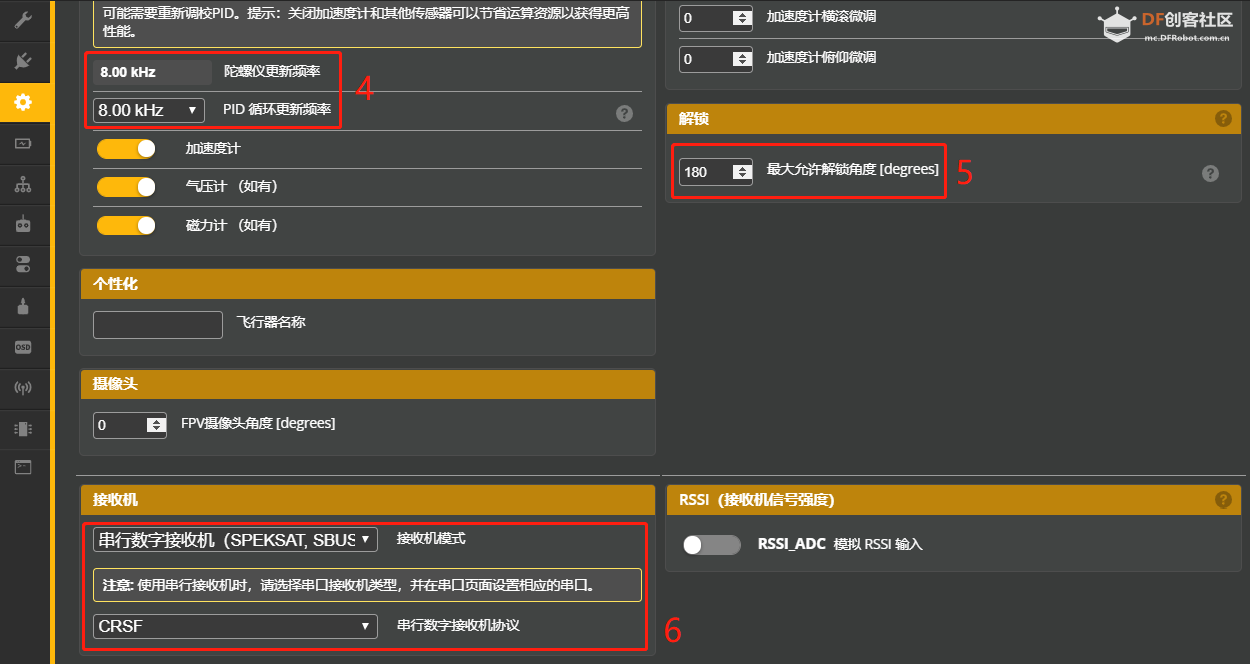
基础功能设置页面能够选择机型,电调协议,遥控器协议等。入门阶段需要了解以下功能。
向下滚屏:
向下滚屏:
此步骤只有在遥控器完成对频后才能设置。部分飞控需要连接锂电池才能给接收机供电并对频。
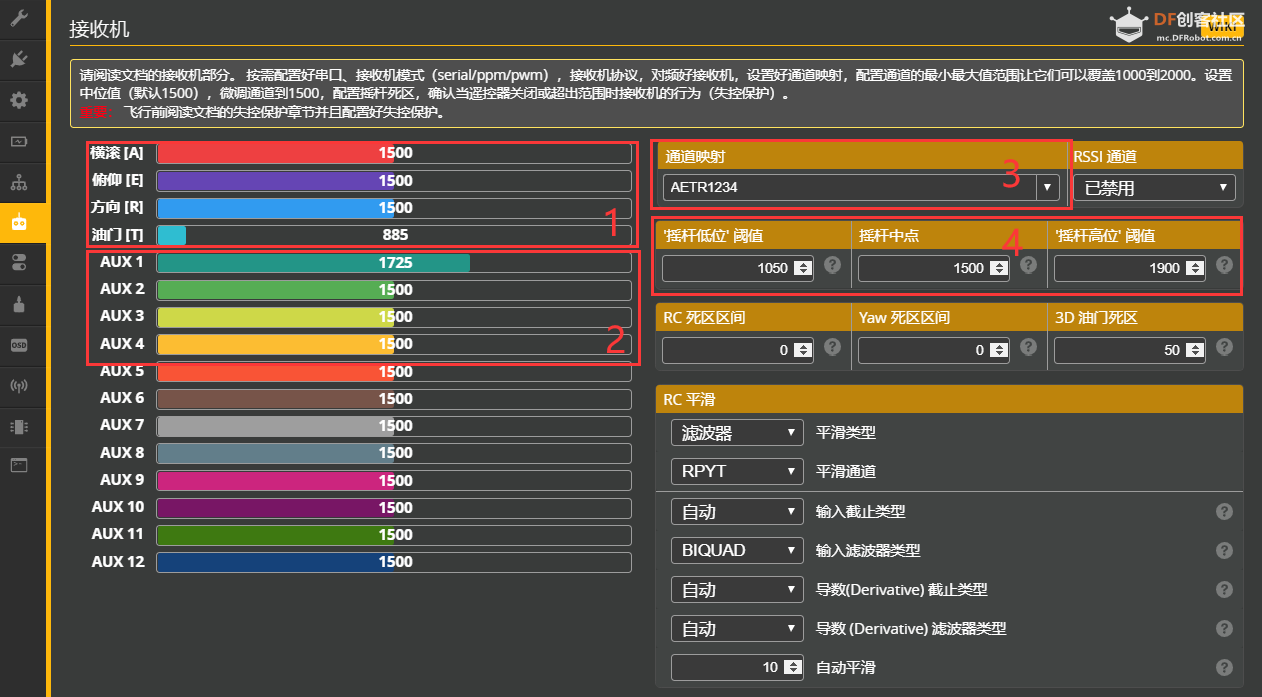
在遥控器对频状态下能看到两个摇杆的输入值。美国手遥控器对应关系如下: 横滚(Roll)= 右摇杆横向 俯仰(Pitch)= 右摇杆纵向 方向(Yaw)= 左摇杆横向 油门(Throttle)= 左摇杆纵向 遥控器各拨杆开关的输入值,OpenTX遥控器在新建用户档案时需要自定设置。 不同型号遥控器的摇杆映射存在差异,如果映射错误可以尝试切换。也可以在遥控器的菜单中设置。 设置摇杆的有效范围。高位和低位阈值差值越小,则有摇杆有效范围越小。 解锁,自稳,反乌龟等设置页面中设置拨杆开关的各个功能,需要先在上一步中确认各拨杆开关的信号能被接收到。 黄色小点的位置会随着摇杆位置而移动,拖动黄条两端可以设置触发阈值。小点碰到黄色区域就能激活对应模式。
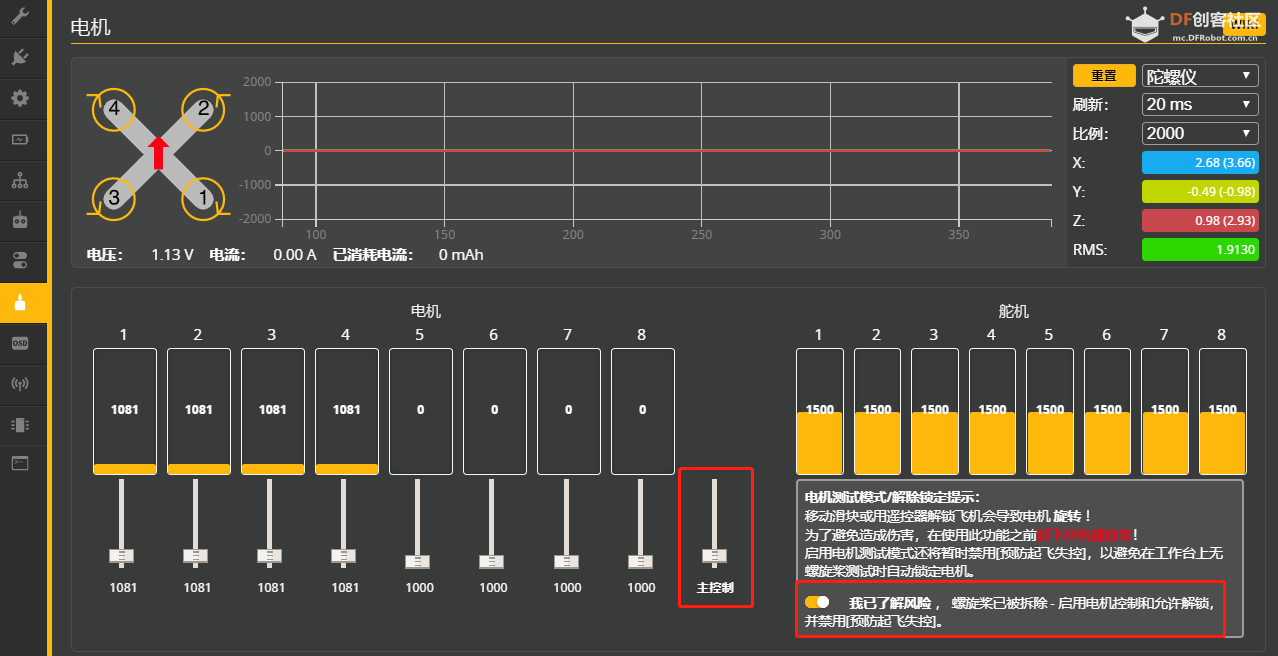
入门阶段需要配置以下模式: ARM(必备) 解锁区域设置。当拨杆和触发黄色区域时穿越机才能解锁。 ANGLE(必备) 自稳模式模式切换。右摇杆回中时穿越机会自动悬停。 HORIZON(可选) 半自稳模式切换。在小范围角度内启动自稳模式。可以与自稳模式切换共用一个三挡拨杆开关。 电机测试 连接电池注意:连线前需要拆卸所有螺旋桨和螺母。 插电时飞控将启动机身自检,发出蜂鸣器提示。如果没有提示音需要检查锂电池的电量或接线。 电机低速转动测试打开右下角的解锁开关,轻微推动主控制拨杆。观察四个电机是否转动正常。
按照配置界面左上角的图片确认电机转向。如果电机转向有误参照按以下方式修改。 方法一:更改接线(新手推荐): 拆下飞控后,将旋转方向相反电机的任意两个引脚调换就能倒置转向。 方法二:下载 BLHeli 电调配置工具 安装螺旋桨电机配置完成后,可以拔下USB数据线,拔出锂电池,合上顶板并安装螺旋桨。 螺旋桨分为正桨和反桨,两种桨叶构造镜像对称,需要结合电机的转向和桨叶的角度进行匹配。安装错误将导致气流反向。 目视飞行测试完成以上所有配置步骤后就可以尝试开始目视飞行。 首次飞行建议开启自稳模式,牢记解锁拨杆位置。可以参考目视飞行的教程熟悉刚拼装完成的穿越机。 |





【本文地址】
今日新闻 |
推荐新闻 |