|
模板匹配指的是通过模板图像与测试图像之间的比较,找到测试图像上与模板图像相似的部分,这是通过计算模板图像与测试图像中目标的相似度来实现的,可以快速地在测试图像中定位出预定义的目标。匹配的主要思路是使用一个目标原型,根据它创建一个模板,在测试图像中搜索与该模板图像最相似的目标,并寻找与该模板的均值或方差最接近的区域。
通过模板匹配可以得到目标的相似度,旋转角度,行列坐标,缩放大小等。
针对不同的图像特征和检测环境,有多种模板匹配算法。如何选择合适的模板匹配算法,取决于具体的图像数据和匹配任务。只有理解这些算法的原理和适用场景后,才能根据项目的需要选择合适的算法。
一、基于灰度值的模板匹配
基于灰度值的模板匹配是最经典的模板匹配算法,也是最早提出来的模板匹配算法。这种算法的根本思想是,计算模板图像与检测图像之间的像素灰度差值的绝对值总和(SAD方法)或者平方差总和(SSD方法)。
其原理是:首先选择一块ROI(感兴趣区域)作为模板图像,生成基于灰度值的模板。然后将检测图像与模板图像进行粗匹配,在检测图像与模板图像中任选一点,采取隔点搜索的方式计算二者灰度的相似性,这样粗匹配一遍得到粗相关点。接下来进行精匹配,将得到的粗相关点作为中心点,用最小二乘法寻找二者之间的最优匹配点。
由于这种方法是利用模板图像的所有灰度值进行匹配,但在光照发生变化的情况下灰度值会产生强烈的变化,因此该方法不能适应光照发生变化的情况,也不能用于多通道图像的匹配,一般只用于简单图像的匹配。
灰度匹配算子原型如下:
create_template(Template : : FirstError, NumLevel, Optimize,
GrayValues : TemplateID)
以下是一个实例:
dev_clear_window ()
read_image (Image, 'C:/Users/Administrator/Desktop/test22.png')
rgb1_to_gray (Image, GrayImage)
gen_circle (ROI_0, 84, 180, 20)
reduce_domain (GrayImage, ROI_0, ImageReduced)
create_template (ImageReduced, 5, 4, 'sort', 'original', TemplateID)
threshold (GrayImage, Region, 128, 255)
connection (Region, ConnectedRegions)
select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 1000, 50000)
add_channels (SelectedRegions, GrayImage, GrayRegions)
best_match (GrayRegions, TemplateID, 40, 'false', Row, Column, Error1)
tuple_gen_const (|Row|, 20, Radius)
dev_set_line_width (3)
gen_circle_contour_xld (Circles, Row, Column, Radius, 0, 6.28318, 'positive', 1)
dev_display(GrayImage)
dev_display(Circles)
这种方法适用于目标图像光照比较稳定的情况,多数情况下还是优先考虑基于相关性的匹配和基于形状的匹配。只有针对极少数的简单图像,才会考虑基于灰度值的匹配。
二、基于相关性的模板匹配
基于相关性的模板匹配其实是另一种基于灰度值的匹配,不过它的特点是使用一种归一化的互相关匹配(Normalized Cross Correlation,NCC)来衡量模板图像和检测图像之间的关系,因此,在光照方面受的影响比较小。与经典的基于灰度值的匹配算法不同的是,它的速度要快很多。与基于形状模板的匹配算法相比,它的优势是对一些形状有细微变化的、纹理复杂的或者是聚焦模糊的检测图像都能检索得到。
其原理是:把模板图像中的所有像素按列顺序组成一个行向量a,即模板的特征向量,然后在检测图像上寻找与模板最匹配的区域b,通过计算两个向量的夹角,来衡量匹配的概率,如下面所示:

以下是一个实例:
read_image (Image, 'cap_exposure/cap_exposure_03')
dev_close_window ()
dev_open_window_fit_image (Image, 0, 0, -1, -1, WindowHandle)
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
dev_update_off ()
gen_circle (Circle, 246, 336, 150)
area_center (Circle, Area, RowRef, ColumnRef)
reduce_domain (Image, Circle, ImageReduced)
create_ncc_model (ImageReduced, 'auto', 0, 0, 'auto', 'use_polarity', ModelID)
dev_set_draw ('margin')
dev_display (Image)
dev_set_color ('yellow')
dev_display (Circle)
disp_message (WindowHandle, 'Trained NCC model', 'window', 12, 12, 'black', 'true')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
Rows := []
Cols := []
for J := 1 to 10 by 1
read_image (Image, 'cap_exposure/cap_exposure_' + J$'02')
find_ncc_model (Image, ModelID, 0, 0, 0.5, 1, 0.5, 'true', 0, Row, Column, Angle, Score)
Rows := [Rows,Row]
Cols := [Cols,Column]
dev_display (Image)
dev_display_ncc_matching_results (ModelID, 'green', Row, Column, Angle, 0)
disp_message (WindowHandle, 'Found NCC model', 'window', 12, 12, 'black', 'true')
if (J < 10)
disp_continue_message (WindowHandle, 'black', 'true')
endif
stop ()
endfor
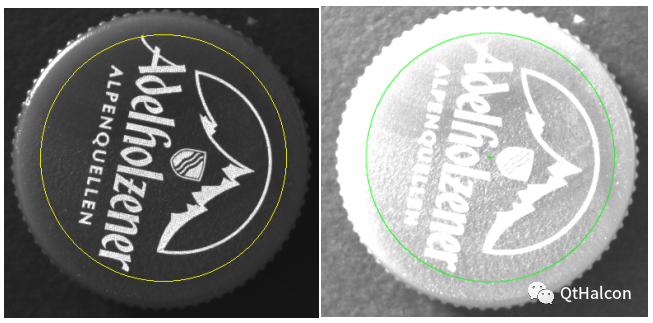
选取一块圆形区域作为模板图像,并根据其灰度值创建模板。当检测图像亮度和形状变化很大还是能够匹配得到。
该方法不但能适应光照变化,对小范围的遮挡和缺失也同样适用,同时还适用于聚焦不清的图像和形状变形,因此在实际应用中比较广泛。但是,该方法也有其局限性,如果与参考图像相比,检测图像的位移、旋转或者缩放比较大,可能会导致匹配失败。
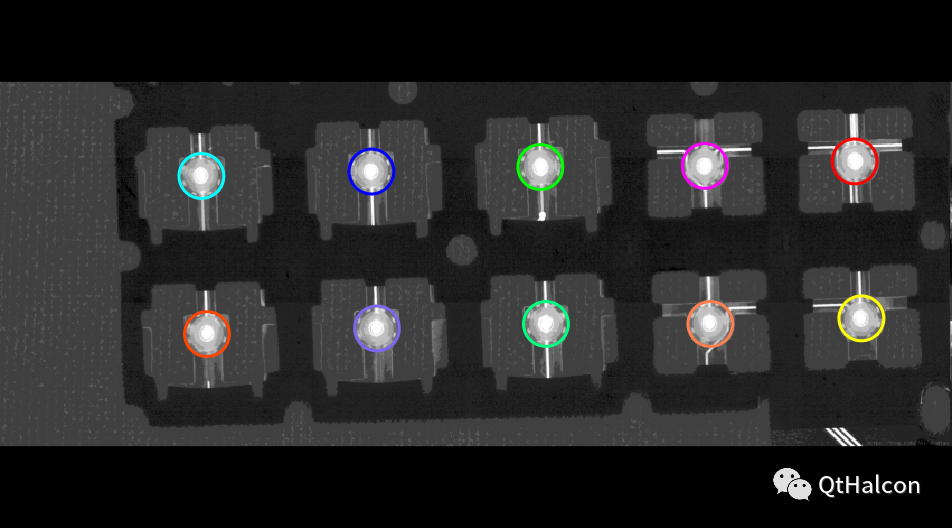
三、基于形状的模板匹配
基于形状的模板匹配,也称为基于边缘方向梯度的匹配,是一种最常用也最前沿的模板匹配算法。该算法以物体边缘的梯度相关性作为匹配标准,原理是提取ROI中的边缘特征,结合灰度信息创建模板,并根据模板的大小和清晰度的要求生成多层级的图像金字塔模型。接着在图像金字塔层中自上而下逐层搜索模板图像,直到搜索到最底层或得到确定的匹配结果为止。
以下是一个实例:

dev_update_pc ('off')
dev_update_window ('off')
dev_update_var ('off')
read_image (Image, 'green-dot')
get_image_size (Image, Width, Height)
dev_close_window ()
dev_open_window (0, 0, Width, Height, 'black', WindowHandle)
dev_set_color ('red')
dev_display (Image)
threshold (Image, Region, 0, 128)
connection (Region, ConnectedRegions)
select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 10000, 20000)
fill_up (SelectedRegions, RegionFillUp)
dilation_circle (RegionFillUp, RegionDilation, 5.5)
reduce_domain (Image, RegionDilation, ImageReduced)
create_scaled_shape_model (ImageReduced, 5, rad(-45), rad(90), 'auto', 0.8, 1.0, 'auto', 'none', 'ignore_global_polarity', 40, 10, ModelID)
get_shape_model_contours (Model, ModelID, 1)
area_center (RegionFillUp, Area, RowRef, ColumnRef)
vector_angle_to_rigid (0, 0, 0, RowRef, ColumnRef, 0, HomMat2D)
affine_trans_contour_xld (Model, ModelTrans, HomMat2D)
dev_display (Image)
dev_display (ModelTrans)
read_image (ImageSearch, 'green-dots')
dev_display (ImageSearch)
dev_set_line_width (3)
find_scaled_shape_model (ImageSearch, ModelID, rad(-45), rad(90), 0.8, 1.0, 0.5, 0, 0.5, 'least_squares', 5, 0.8, Row, Column, Angle, Scale, Score)
for I := 0 to |Score| - 1 by 1
hom_mat2d_identity (HomMat2DIdentity)
hom_mat2d_translate (HomMat2DIdentity, Row[I], Column[I], HomMat2DTranslate)
hom_mat2d_rotate (HomMat2DTranslate, Angle[I], Row[I], Column[I], HomMat2DRotate)
hom_mat2d_scale (HomMat2DRotate, Scale[I], Scale[I], Row[I], Column[I], HomMat2DScale)
affine_trans_contour_xld (Model, ModelTrans, HomMat2DScale)
dev_display (ModelTrans)
endfor
该方法使用边缘特征定位物体,对于很多干扰因素不敏感,如光照和图像的灰度变化,甚至可以支持局部边缘缺失、杂乱场景、噪声、失焦和轻微形变的模型。更进一步说,它甚至可以支持多个模板同步进行搜索。但是,在搜索过程中,如果目标图像发生大的旋转或缩放,则会影响搜索的结果,因此不适用于旋转和缩放比较大的情况。
四、基于组件的模板匹配
基于组件的模板匹配可以说是基于形状的模板匹配的加强版,加强的地方在于,这种方法允许模板中包含多个目标,并且允许目标之间存在相对运动(位移和旋转)。这决定了这种方式不适用于尺寸缩放的情况。由于有多个ROI,且需要检测多个ROI之间的相对运动关系,因此这种方法与基于形状的模板匹配相比要稍微复杂一点,且不适用于失焦图像和轻微形变的目标。
以下是一个实例:
dev_update_off ()
dev_close_window ()
read_image (ModelImage, 'modules/modules_model')
dev_open_window_fit_image (ModelImage, 0, 0, -1, -1, WindowHandle)
dev_display (ModelImage)
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
Message := 'This program shows how to use the'
Message[1] := 'component-based matching'
Message[2] := 'to locate a compound object'
disp_message (WindowHandle, Message, 'window', 12, 12, 'black', 'true')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
*
* Define the regions for the components
gen_rectangle2 (ComponentRegions, 318, 109, -1.62, 34, 19)
gen_rectangle2 (Rectangle2, 342, 238, -1.63, 32, 17)
gen_rectangle2 (Rectangle3, 355, 505, 1.41, 25, 17)
gen_rectangle2 (Rectangle4, 247, 448, 0, 14, 8)
gen_rectangle2 (Rectangle5, 237, 537, -1.57, 13, 10)
concat_obj (ComponentRegions, Rectangle2, ComponentRegions)
concat_obj (ComponentRegions, Rectangle3, ComponentRegions)
concat_obj (ComponentRegions, Rectangle4, ComponentRegions)
concat_obj (ComponentRegions, Rectangle5, ComponentRegions)
dev_set_colored (12)
dev_set_draw ('margin')
dev_set_line_width (2)
dev_display (ModelImage)
dev_display (ComponentRegions)
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
disp_message (WindowHandle, 'Regions of the components', 'window', 12, 12, 'black', 'true')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
*
* Create the component model by explicitly specifying the relations
create_component_model (ModelImage, ComponentRegions, 20, 20, rad(25), 0, rad(360), 15, 40, 15, 10, 0.8, [4,3,3,3,3], 0, 'none', 'use_polarity', 'true', ComponentModelID, RootRanking)
*
* Find the component model in a run-time image
ImageName := 'modules/modules_'
for I := 1 to 12 by 1
read_image (SearchImage, ImageName + I$'.2d')
find_component_model (SearchImage, ComponentModelID, RootRanking, 0, rad(360), 0.5, 0, 0.5, 'stop_search', 'search_from_best', 'none', 0.8, 'interpolation', 0, 0.8, ModelStart, ModelEnd, Score, RowComp, ColumnComp, AngleComp, ScoreComp, ModelComp)
dev_display (SearchImage)
* Display the found component models
for Match := 0 to |ModelStart| - 1 by 1
dev_set_line_width (1)
get_found_component_model (FoundComponents, ComponentModelID, ModelStart, ModelEnd, RowComp, ColumnComp, AngleComp, ScoreComp, ModelComp, Match, 'false', RowCompInst, ColumnCompInst, AngleCompInst, ScoreCompInst)
dev_display (FoundComponents)
endfor
disp_message (WindowHandle, 'Found component models', 'window', 12, 12, 'black', 'true')
* If the program shall stop after every image, the following lines
* must be activated
if (I < 12)
disp_continue_message (WindowHandle, 'black', 'true')
endif
stop ()
endfor
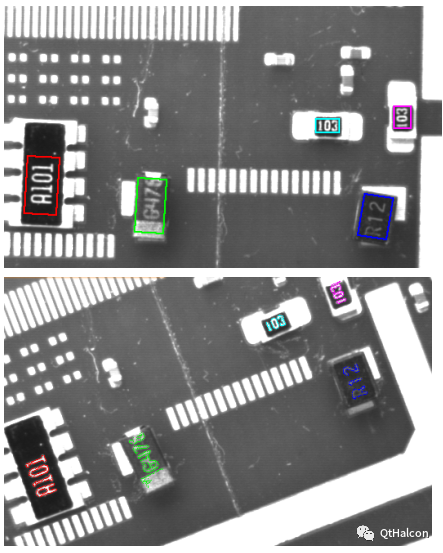
本例在图中选取了几个元器组件作为模板图像,并根据其形状和相对关系创建了模板,图像在旋转的情况下仍得到了理想的匹配结果。
基于组件的模板匹配适用于组成部件之间有相对运动的物体,使用边缘特征定位物体,对于很多干扰因素不敏感,如光照变化、混乱无序等。其适用于多通道图像,不适用于纹理图像、聚焦不清的图像和形状变形的图像。
五、基于形变的模板匹配
形变分为两种,一种是基于目标局部的形变,另一种是由于透视关系而产生的形变。基于形变的模板匹配也是一种基于形状的匹配方法,但不同的是,其返回结果中不仅包括轻微形变的形状、形变的位置和参数,还有描述形变的参数,如旋转角度、缩放倍数等。
基于透视的形变可以返回一个二维投影变换矩阵。如果是在相机标定的情况下,通过相机参数,还可以计算出目标的三维位姿。
以下是一个实例:

dev_update_off ()
dev_close_window ()
read_image (ModelImage, 'food/peanut_chocolate_candies_model')
dev_open_window_fit_image (ModelImage, 0, 0, -1, -1, WindowHandle)
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
*
* 创建一个模板
create_local_deformable_model (ModelImage, 'auto', [], [], 'auto', 1, [], 'auto', 1, [], 'auto', 'none', 'use_polarity', 65, 25, [], [], ModelID)
get_deformable_model_contours (ModelContours, ModelID, 1)
area_center (ModelImage, Area, Row, Column)
hom_mat2d_identity (HomMat2DIdentity)
hom_mat2d_translate (HomMat2DIdentity, Row, Column, HomMat2DTranslate)
affine_trans_contour_xld (ModelContours, ContoursAffineTrans, HomMat2DTranslate)
dev_set_line_width (2)
dev_set_color ('yellow')
dev_display (ModelImage)
dev_display (ContoursAffineTrans)
disp_message (WindowHandle, 'Model image and contours', 'window', 12, 12, 'black', 'true')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
Smoothness := 19
NumImages := 12
for Index := 1 to NumImages by 1
read_image (Image, 'food/peanut_chocolate_candies_' + Index$'02')
dev_resize_window_fit_image (Image, 0, 0, -1, -1)
dev_display (Image)
disp_message (WindowHandle, 'Search ...', 'window', 12, 12, 'black', 'true')
count_seconds (S1)
* 查找
find_local_deformable_model (Image, ImageRectified, VectorField, DeformedContours, ModelID, rad(-120), rad(60), 1, 1, 1, 1, 0.3, 0, 0.7, 0, 0.1, ['vector_field','deformed_contours'], ['deformation_smoothness','expand_border','subpixel'], [Smoothness,0,0], Score, Row, Column)
count_seconds (S2)
Time := S2 - S1
* 显示结果
gen_warped_mesh (VectorField, WarpedMesh, Smoothness)
dev_set_line_width (1)
dev_set_color ('yellow')
dev_display (WarpedMesh)
Found[Index] := |Score|
dev_set_line_width (2)
dev_set_color ('green')
dev_display (DeformedContours)
disp_message (WindowHandle, |Score| + ' matches found in ' + Time$'1.2f' + ' s', 'window', 12, 12, 'black', 'true')
disp_message (WindowHandle, 'Score: ' + Score$'.2f', 'image', 350, Column - 80, 'black', 'true')
if (Index < NumImages)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
endif
endfor
六、基于描述符的模板匹配
与基于透视形变的模板匹配类似,基于描述符的模板匹配能够在物体处于透视形变的状态下进行匹配,并且已标定和未标定的相机图像都适用。与透视形变不同的是,它的模板不是根据边缘轮廓创建的,而是根据特征点创建的。
点的位置或相邻像素的灰度信息等都可以作为描述符。有纹理的平面图形非常适用于这种方法,尤其是对于旋转倾斜等场景中的匹配可以得到非常理想的结果。
以下是一个实例:
dev_close_window ()
*读取参考图像,这里的参考图像应只包含识别的关键区域,用于创建模板
read_image (ImageLabel, 'data/labelShape-0')
*设置窗口参数用于显示图像
get_image_size (ImageLabel, Width, Height)
dev_open_window (0, 0, Width, Height, 'black', WindowHandle1)
dev_set_draw ('margin')
dev_display (ImageLabel)
*设置用于存储特征点和感兴趣区域的变量
NumPoints := []
RowRoi := [10,10,Height - 10,Height - 10]
ColRoi := [10,Width - 10,Width - 10,10]
*将参考图像中的除边缘外的区域都设为感兴趣区域。因为参考图像已经近似于匹配的纹理样本
gen_rectangle1 (Rectangle, 10, 10, Height - 10, Width - 10)
*显示参考图像上选择的ROI区域
dev_set_line_width (4)
dev_display (Rectangle)
stop ()
*将感兴趣区域剪裁为模板图像
reduce_domain (ImageLabel, Rectangle, ImageReduced)
dev_clear_window ()
dev_display (ImageLabel)
*创建基于描述符的模板
create_uncalib_descriptor_model (ImageReduced, 'harris_binomial', [], [], ['min_rot','max_rot','min_scale','max_scale'], [-90,90,0.2,1.1], 42, ModelID)
*设置模型的原点,为了后面获取坐标作参照
set_descriptor_model_origin (ModelID, -Height / 2, -Width / 2)
*获取模型中特征点的位置
get_descriptor_model_points (ModelID, 'model', 'all', Row_D, Col_D)
*将模型中计算出的特征点存入NumPoints变量中
NumPoints := [NumPoints,|Row_D|]
*读取测试图像,这里读取的是单通道灰度图像,因此省略了通道转化的步骤
read_image (ImageGray, 'data/labelShape-1')
dev_resize_window_fit_image (ImageGray, 0, 0, -1, -1)
dev_display (ImageGray)
*对描述符特征点进行匹配
find_uncalib_descriptor_model (ImageGray, ModelID, 'threshold', 800, ['min_score_descr','guided_matching'], [0.003,'on'], 0.25, 1, 'num_points', HomMat2D, Score)
*显示匹配结果,将特征点用不同的颜色绘制出来
if ((|HomMat2D| > 0) and (Score > NumPoints[0] / 4))
get_descriptor_model_points (ModelID, 'search', 0, Row, Col)
*创建十字标识符
gen_cross_contour_xld (Cross, Row, Col, 6, 0.785398)
projective_trans_region (Rectangle, TransRegion, HomMat2D, 'bilinear')
projective_trans_pixel (HomMat2D, RowRoi, ColRoi, RowTrans, ColTrans)
angle_ll (RowTrans[2], ColTrans[2], RowTrans[1], ColTrans[1], RowTrans[1], ColTrans[1], RowTrans[0], ColTrans[0], Angle)
Angle := deg(Angle)
if (Angle > 70 and Angle < 110)
area_center (TransRegion, Area, Row, Column)
dev_set_color ('green')
dev_set_line_width (4)
dev_display (TransRegion)
dev_set_colored (6)
dev_display (Cross)
endif
endif
stop ()
*匹配结束,释放模板资源
clear_descriptor_model (ModelID)
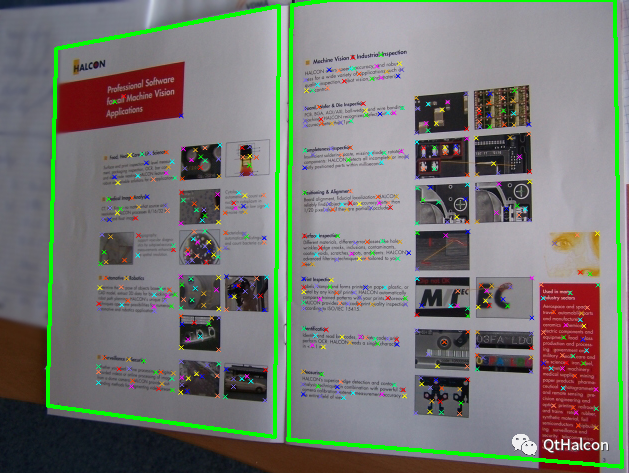
图中五颜六色的点就是特征点,基于描述符的模板匹配只能用于有纹理的图像。
七、基于点的模板匹配
基于点的模板匹配主要是用在三维匹配中,通过寻找图像中对应的特征点,进行两幅重叠图像的拼接等操作,在相机标定的情况下被广泛应用。其主要原理是通过提取两幅图像之间的重要特征点实现匹配。把这些特征点作为匹配的输入,输出部分则是两幅图像之间的映射关系,支持图像的位移、旋转、缩放和透视形变。
同时,也可以把两幅图中的一幅作为模板,另一幅看作检测图像的一个实例。该方法在透视形变的情况下无须标定就能完成匹配,但是运行时间会增加,增加的时间主要来自特征点的提取。
八、模板匹配方法总结
选择适合的模板匹配方法可以事半功倍。
(1)基于灰度值的模板匹配
适用于目标区域灰度值比较稳定,检测图像与模板图像相似度高,且具有相同的外界条件的场景。不适用于杂乱场景、遮挡、光照变化、尺寸缩放及多通道图像。
(2)基于相关性的模板匹配
适用于失焦图像、轻微形变、线性光照变化及轮廓模糊的图像,对纹理图像尤为支持。不适用于杂乱场景、遮挡、非线性光线变化、大幅的旋转、尺寸缩放和多通道图像。
(3)基于形状的模板匹配
适用于目标轮廓比较清晰的场景。适用于杂乱场景、遮挡、非线性光照变化、尺寸缩放、失焦和轻微形变的图像,以及多通道图像和多个模板的同步匹配,不适用于纹理复杂的图像。
(4)基于组件的模板匹配
适用于多个目标的匹配场景。适用于杂乱场景、遮挡、非线性光照变化的图像,以及多通道图像和多个模板的同步匹配。不适用于纹理复杂的图像,以及失焦和形变的图像。
(5)基于局部形变的模板匹配
适用于杂乱场景、遮挡、非线性光照变化、尺寸缩放和轻微局部形变的图像,以及多通道图像.
(6)基于透视形变的模板匹配
适用于杂乱场景、遮挡、非线性光照变化、尺寸缩放、失焦和透视形变的图像,以及多通道图像。但是对于纹理图像的支持不够好。
(7)基于描述符的模板匹配
适用于杂乱场景、遮挡、非线性光照变化、尺寸缩放、轻微局部形变、透视形变的图像,以及有纹理的图像,不适用于失焦和多通道图像。
(8)基于点的模板匹配
用于在多幅部分重合的图像之间建立对应的关系。

|