深度相机(一) |
您所在的位置:网站首页 › 相机类型及各自的特点 › 深度相机(一) |
深度相机(一)
|
目前的深度相机根据其工作原理可以分为三种:TOF、RGB双目、结构光 一、RGB双目 RGB双目相机因为非常依赖纯图像特征匹配,所以在光照较暗或者过度曝光的情况下效果都非常差,另外如果被测场景本身缺乏纹理,也很难进行特征提取和匹配。你看看下面的图就懂了。 三种相机的参数对比: 从分辨率、帧率、软件复杂度、功耗等方面来考虑 (1)分辨率 TOF方案深度图分辨率很难提高,一般都达不到VGA(640x480)分辨率。比如Kinect2的TOF方案深度图分辨率只有512x424。而Google和联想合作的PHAB2手机的后置TOF深度相机分辨率只有224x171。TOF方案受物理器件的限制,分辨率很难做到接近VGA的,即使做到,也会和功耗呈指数倍增长。 结构光的分辨率 在较近使用范围内,结构光方案的分辨率会大大高于TOF方案。比如目前结构光方案的深度图最高可以做到1080p左右的分辨率了。 (2)帧率帧率的话,TOF方案可以达到非常高的帧率,差不多上百fps吧。结构光方案帧率会低点,典型的是30fps,不过这也基本够用了。 (3)软件复杂度 结构光因为需要对编码的结构光进行解码,所以复杂度要比直接测距的TOF高一些。 (4)功耗 TOF是激光全面照射,而结构光是只照射其中局部区域,比如PrimeSense的伪随机散斑图案,只覆盖了不到十分之一的空间。另外,TOF发射的是高频调制脉冲,而结构光投射图案并不需要高频调制,所以结构光的功耗要比TOF低很多。还是以伪随机散斑结构光为例,结构光方案功耗只有TOF的十分之一不到吧。 下面是三种方案在分辨率,帧率,软件复杂度和功耗方面的对比结果。 计算方式也分几种:一是直接用ASIC(专用集成电路)进行计算,成本稍微高一点,但是处理速度快,支持高帧率和高分辨率深度相机,关键是比通用芯片功耗低。二是DSP+软件算法,成本跟用ASIC差不多,但支持不了高帧率高分辨率,功耗比ASIC稍高。三是直接用手机的AP(Application Processor)进行纯软件计算,这个不需要额外增加硬件成本,但是比较消耗AP的计算资源。同样也不支持高帧率高分辨率,功耗比较大。  iPhone X的深度相机技术方案:
结构光原理的深度相机。具体来说是:单目IR+投影红外点阵+ASIC方案
。该方案在深度分辨率、深度测量精度上有较大优势,实时性处理和全天候工作也都有保障,功耗也相对较低,就是成本稍高了一些。
iPhone X的深度相机技术方案:
结构光原理的深度相机。具体来说是:单目IR+投影红外点阵+ASIC方案
。该方案在深度分辨率、深度测量精度上有较大优势,实时性处理和全天候工作也都有保障,功耗也相对较低,就是成本稍高了一些。
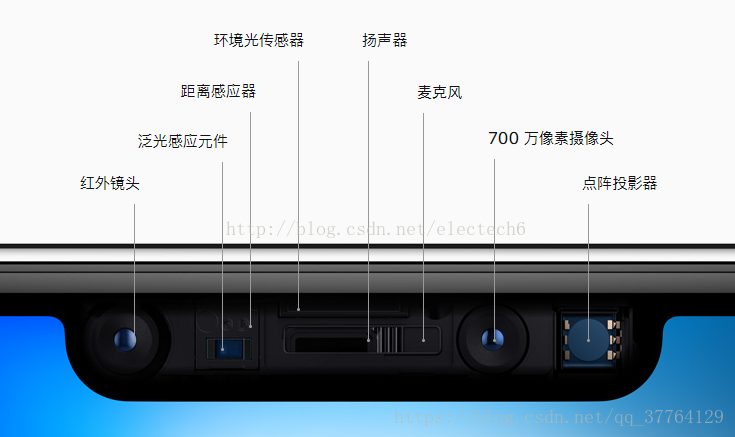 9月13日苹果发布了致敬十周年的新机型iPhone X,其中前置原深感(TrueDepth)相机引起了极大的舆论关注。该相机的构成如下图所示。从左到右,依次是红外镜头、泛光感应元件、距离传感器、环境光传感器、扬声器、麦克风、700万像素摄像头、点阵投影器。其中最有里程碑意义的当属红外镜头 + 点阵投影器 + RGB摄像头的组合。
转自:https://blog.csdn.net/electech6/article/details/78889057
https://blog.csdn.net/electech6/article/details/78348917
9月13日苹果发布了致敬十周年的新机型iPhone X,其中前置原深感(TrueDepth)相机引起了极大的舆论关注。该相机的构成如下图所示。从左到右,依次是红外镜头、泛光感应元件、距离传感器、环境光传感器、扬声器、麦克风、700万像素摄像头、点阵投影器。其中最有里程碑意义的当属红外镜头 + 点阵投影器 + RGB摄像头的组合。
转自:https://blog.csdn.net/electech6/article/details/78889057
https://blog.csdn.net/electech6/article/details/78348917
|



【本文地址】
今日新闻 |
推荐新闻 |