面阵相机的主要参数及应用说明 |
您所在的位置:网站首页 › 相机焦距有多少 › 面阵相机的主要参数及应用说明 |
面阵相机的主要参数及应用说明
|
目录 传感器尺寸 像素 像元 像元尺寸 像元深度 分辨率 精度 帧率、行频 增益 外触发 信号输出: 曝光时间/曝光方式 拖影 动态范围 噪点/信噪比 光谱响应 传感器尺寸即靶面尺寸,面阵相机以芯片的对角线长度来度量;线阵相机以芯片的横向长度来度量。工业上面阵相机常用的传感器尺寸如下表,实际尺寸可能存在些许差异。 芯片水平H(mm)垂直V(mm)对角D(mm)1"12.79.616.02/3"8.86.611.01/2"6.44.88.01/2.3"6.44.67.91/2.5"5.74.37.11/3"4.83.66.01/4"3.62.44.0
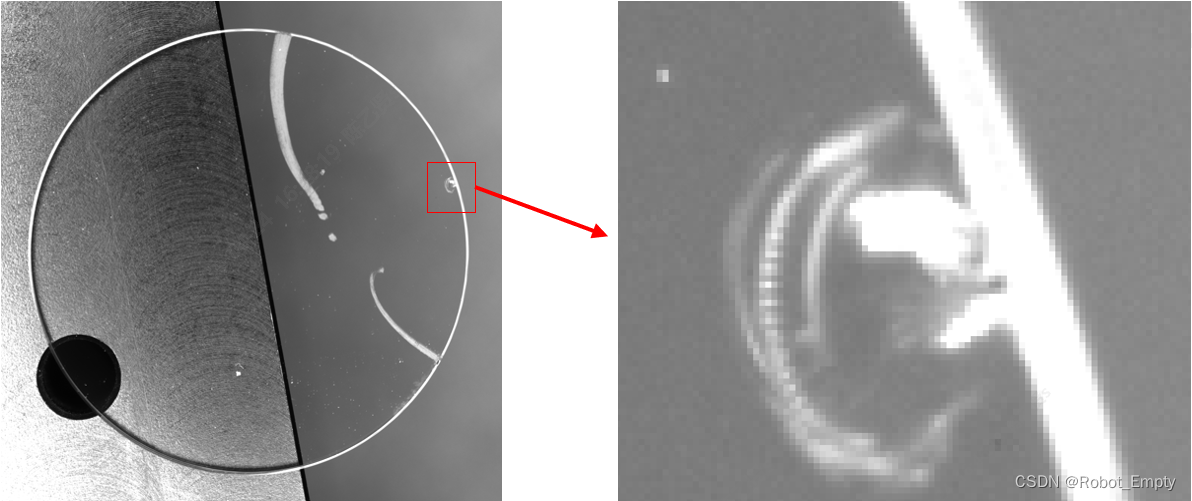
像素是图像的最小组成单元。如下图,将原图局部放大,每一个小格就代表一个像素,其中每一个像素对应一个灰度值。
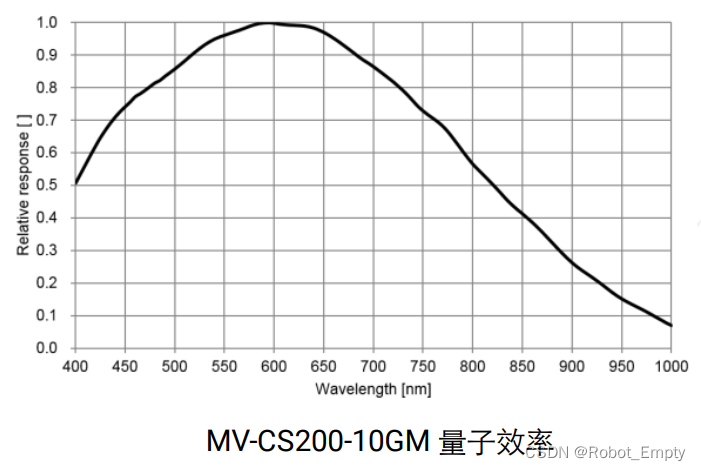
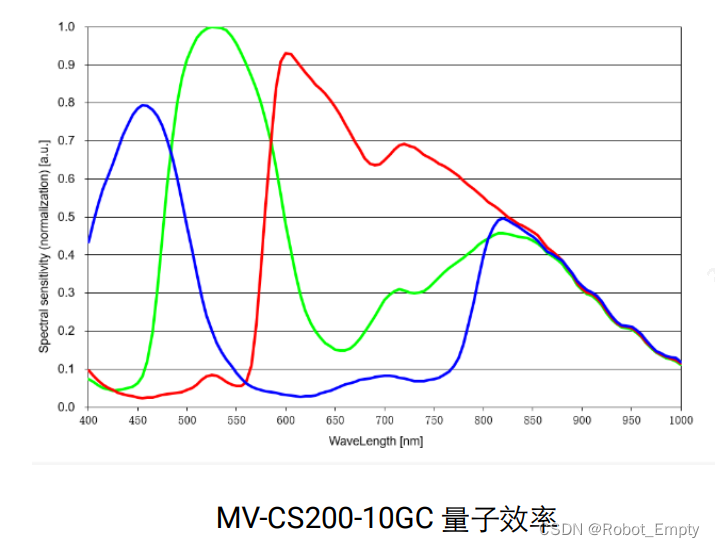
像元是相机芯片上的最小感光单元,每个像元对应图像上的一个像素。 像元尺寸像元尺寸是相机芯片上每个像元的实际物理尺寸,常见的有2.2um,3.45um,3.75um,4.8um,5.5um,5.86um,7.4um等。对同尺寸的芯片,外部光照环境和相机参数设置相同(比如曝光时间和增益等)的情况下,像元尺寸越大,能够接收到得光子数量越多芯片灵敏度越高,感光性越好,所成图像越亮。 像元深度存储每个像素所用的数据位数,称为像元深度。对于黑白相机来说,像元深度定义灰度由暗到亮的灰阶数。例如,像元深度是8位的相机,输出的图像灰度等级是2的8次方,即0-255共256级。像元深度是10位的相机,输出的图像灰度等级是2的10次方,即0-1023共1024级。像元深度越大,固然可以增强测量的精度,但同时也降低了系统的速度。一般工业上都是使用8位的像元深度。 分辨率分辨率由芯片阵列排列的像元数量决定,对于面阵相机来说水平像素数和垂直像素数相乘即为相机的分辨率。例如一个相机的分辨率是1280(H)x1024(V),表示每行的像元数量是1280,有1024行像元,此相机的分辨率大约是130万像素。在对同样大小的视场成像时,分辨率越高,对细节的展示越明显。目前常用相机的分辨率有30万、130万、200万、500万、1000万、2900万、7100万、6亿等。 精度图像中每个像素代表的实际物理尺寸。 精度=单方向视场大小/相机单方向分辨率 例如:视场水平方向的长度是32mm,相机水平分辨率为1600,可求得视觉系统的精度为每像素对应0.02mm。 在实际应用中,为提高系统稳定性,通常要求机器视觉的理论精度高于要求精度。 帧率、行频相机的采集频率,面阵相机用帧率表示,线阵相机用行频表示。面阵相机帧率单位为FPS(framepersecond),即帧/秒,指相机每秒钟能采集多少幅图像,1幅图像为1帧。例如15帧/秒,表示相机一秒钟最大能采集15幅图像。一般来说,分辨率越高的相机,帧率越低。 增益输入信号与输出信号的放大比例,用来整体提高画面的亮度。增益的单位为dB。 外触发工业相机一般都具有外触发功能,可以根据外部信号控制图像采集,即接收到一次外部信号,采集一次图像。在实际使用中,可以用传感器和相机的外触发功能配合,进行灵活的使用。 注意事项:在有些使用相机外触发功能的场合,可能会有其他的电子设备的运用,例如直流/交流电机,变频器,接触器等等,如果对各种信号的屏蔽做的不好,很有可能对相机的外触发信号造成干扰,影响相机的使用。 信号输出:在使用相机的外触发功能时,一般来讲,外部光源的照明也是配合相机处于外触发状态。相机采集时光源亮,相机未采集时光源灭。有的相机具有信号输出功能,输出触发信号,控制光源的亮和灭,从而配合相机的图像采集。 曝光时间/曝光方式曝光时间指光投射到相机传感器芯片上,相机芯片的感光时间。一般曝光时间越长,图像越亮。 外触发同步的采集方式,曝光时间可以与行周期一致,也可以设定一个固定的时间。 工业相机中曝光方式分为行曝光与帧曝光,其中行曝光指逐行曝光,帧曝光为一次性曝光所有像元。线阵相机为逐行曝光,可以选择固定行频。 拖影拍摄运动物体时,由于曝光时间与运动速度不匹配,导致物体在像元上重复成像。 动态范围相机的动态范围表明相机可探测光信号的范围,相机所能拍摄到从“最暗”至“最亮”的范围。对于固定相机,其动态范围是一个固定值,不随外界的条件变化而变化。动态范围可以用倍数、dB 或bit等方式来表示。动态范围越大,则相机更能适应不同的光照强度,所能表现的层次越丰富,所包含的色彩空间也越广。 在线性响应区,相机的动态范围定义为饱和曝光量与噪声等效曝光量的比值: 动态范围 = 光敏元的满阱容量 / 等效噪声信号 噪点/信噪比噪点:感光芯片将光线作为接收信号并输出的过程中所产生的图像中的粗糙部分,也指图像中不该出现的外来像素。 信噪比:为相机系统中真实图像信号与图像噪声的比例。 光谱响应光谱响应是指相机的芯片对不同波长的光线的响应能力。一般用光谱响应曲线表示,如图X轴表示入射光的波长,Y轴表示响应能力根据响应光谱不同,可以把相机分为可见光相机(400nm-1000nm峰值500nm-600nm),红外相机(700nm以上),紫外相机(200nm-400nm)。根据应用不同,而选择不同的光谱响应相机。
|

【本文地址】
今日新闻 |
推荐新闻 |