计算机视觉中的数学方法 |
您所在的位置:网站首页 › 直线的摄影平面 › 计算机视觉中的数学方法 |
计算机视觉中的数学方法
|
3.2 投影与反投影
3.2.1 空间点正向投影反向投影(点的反投影)
3.2.2 空间直线正向投影两点参数方程表示Plucker坐标表示1(点Plucker)叉乘矩阵的运算性质其一
Plucker坐标表示2(面Plucker)
反向投影(直线的反投影)
3.2.3 空间平面(世界坐标系直接建在这个平面上,让z==0)无穷远单应
3.2.4 二次曲线正向投影绝对二次曲线的图像(IAC)摄像机自标定的理论基础反向投影
3.2.5 二次曲面二次曲面的投影绝对二次曲面的图像(DIAC)摄像机自标定的理论基础
3.2.1 空间点
正向投影
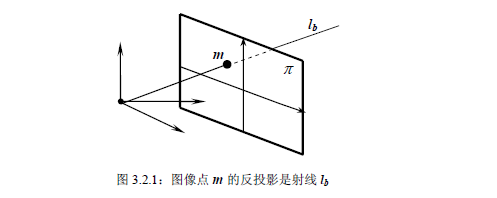
空间点 X 通过摄像机 P 被作用到图像平面的图像点m = PX ,这种投影关系称为摄像机的正向投影,简称为投影。 在正向投影中,无穷远点的投影是非常重要的,这是因为从无穷远点的投影可以恢复景物的仿射结构。 将图像上的点所表示的空间上的点的集合。 反向投影是针对图像平面的基本几何元素而言的,图像平面点m 的反投影是指在摄像机P 的作用下具有像点m 的所有空间点的集合,即
在几何上,像平面上一条直线的反投影是空间中通过摄像机中心的一张平面。
上述w的表示好像错了
|

 下面考虑图像点m的反投影lb在世界坐标系中的方程。这是非常重要的,因为三维计算机视觉中将从多幅图像的对应点的反投影射线恢复空间点的三维坐标。由于两点确定一条直线,所以,如果能确定摄像机中心C和射线lb上另一点的空间坐标,就可以得到射线lb 在空间中的方程。
下面考虑图像点m的反投影lb在世界坐标系中的方程。这是非常重要的,因为三维计算机视觉中将从多幅图像的对应点的反投影射线恢复空间点的三维坐标。由于两点确定一条直线,所以,如果能确定摄像机中心C和射线lb上另一点的空间坐标,就可以得到射线lb 在空间中的方程。 







 与世界坐标系选择无关:因为P矩阵的存在。
与世界坐标系选择无关:因为P矩阵的存在。 
 理解:将平面π映射为像平面
理解:将平面π映射为像平面






 二次曲面Q可用一个4× 4的对称矩阵来表示,它的方程为 XTQX = 0。 当rank(Q)=4时,Q表示一个非退化的二次曲面; 当rank(Q)=3 时,Q 是一个锥面; 当rank(Q)=2 时,Q 表示两张不重合的平面; 当rank(Q)=1 时,Q 表示两张重合的平面。 在考虑摄像机对二次曲面的作用时,一般假定Q是非退化的或是一个锥面。
二次曲面Q可用一个4× 4的对称矩阵来表示,它的方程为 XTQX = 0。 当rank(Q)=4时,Q表示一个非退化的二次曲面; 当rank(Q)=3 时,Q 是一个锥面; 当rank(Q)=2 时,Q 表示两张不重合的平面; 当rank(Q)=1 时,Q 表示两张重合的平面。 在考虑摄像机对二次曲面的作用时,一般假定Q是非退化的或是一个锥面。 






 证明都挺简单
证明都挺简单
【本文地址】