直流电机的原理及驱动 |
您所在的位置:网站首页 › 电机引出线 › 直流电机的原理及驱动 |
直流电机的原理及驱动
|
文章目录
直流电机的原理直流电机的种类有刷电机无刷电机空心杯
直流减速电机减速器减速电机驱动器
直流电机的原理
在了解直流电机工作原理之前,先复习一下高中几个物理知识 第一.左手定则 第二.右手定则 直流电机工作原理
直流发电机的工作原理就是把电枢线圈中感应的交变电动势,靠换向器配合电刷的换向作用,使之从电刷端引出时变为直流电动势的原理。感应电动势的方向按右手定则确定(磁感线指向手心,大拇指指向导体运动方向,其他四指的指向就是导体中感应电动势的方向)。导体受力的方向用左手定则确定。这一对电磁力形成了作用于电枢一个力矩,这个力矩在旋转电机里称为电磁转矩,转矩的方向是逆时针方向,企图使电枢逆时针方向转动。如果此电磁转矩能够克服电枢上的阻转矩(例如由摩擦引起的阻转矩以及其它负载转矩),电枢就能按逆时针方向旋转起来。 直流电机的种类转子和定子的概念在步进电机里已经有了很详细的阐述,传送门 有刷电机
早期电机都是有刷电机,后来为了解决磨损,有了无刷电机 无刷电机无刷电机的解决思路就是让磁铁转动 分两种外转子和内转子
空心杯和传统电机不同,采用的是无铁芯转子,也叫空心杯型转子。也分有刷和无刷 了解了直流电机原理和种类之后,开始学习直流减速的电机的驱动 直流减速电机相比较直流电机加了减速器 减速器一般直流电机的转速都是一分钟几千上万转的,所以一般需要安装减速器。减速器是一种相对精密的机械零件,使用它的目的是降低转速,增加转矩。减速后的直流电机力矩增大、可控性更强。按照传动级数不同可分为单级和多级减速器;按照传动类型可分为齿轮减速器、蜗杆减速器和行星齿轮减速器。 常用的是下面这个多级齿轮电机 驱动很简单,只要正负极加电压就行了 减速电机驱动器常用的有L298N,TB6612FNG 这里我用的是tb6612fng datasheet下载地址 TB6612FNG is a driver IC for DC motor with output transistor in LD MOS structure with low ON-resistor. Two input signals, IN1 and IN2, can choose one of four modes such as CW, CCW, short brake, and stop mode. TB6612FNG是直流电机的驱动器IC,输出晶体管采用LD MOS结构,具有低导通电阻。两个输入信号IN1 和IN2,可以选择四种模式中的一种,如CW,CCW,短制动和停止模式。 特征 ·电源电压:VM = 15V(最大值) ·输出电流:IoUT = 1.2 A(ave)/3.2 A(峰值) ·输出低导通电阻:0.5Q(上限+下限典型值@VM≥5V) ·待机(省电)系统 ·CW / CCW /短制动/停止功能模式 ·内置热关断电路和低压检测电路 ·小面积封装(SSOP24:0.65 mm引脚间距) 几个参数 51版验证程序 #include typedef unsigned char u8; typedef unsigned int u16; typedef unsigned long u32; u8 TR0H; u8 TR0L; bit flag_1s=0; u32 PeriodCnt = 0; u8 HighRH = 0; u8 HighRL = 0; u8 LowRH = 0; u8 LowRL = 0; u8 T1RH = 0; u8 T1RL = 0; sbit AIN1=P0^2;//AIN1引脚定义 sbit AIN2=P0^1;//AIN2引脚定义 sbit PWMA=P0^0;//PWM输出引脚定义 void ConfigPWM(u16 fr, u8 dc);//配置PWM,fr频率,dc占空比 void ConfigTimer1(u8 ms); void MotorForward() { AIN1=1; AIN2=0; } void MotorReverse() { AIN1=0; AIN2=1; } 延时程序 11.0592mhz /oid delayms(u16 t) //{ // u16 i,j; // for(i=t;i>0;i--) // for(j=114;j>0;j--); //} void main() { // ConfigTimer1(100); MotorReverse(); ConfigPWM(100,80);//pwn配置 EA = 1;//打开总中断 while(1) { // if(flag_1s==1) // { // flag_1s=0; // if(DIR) // { // DIR=0; // } // else // { // DIR=1; // } // } } } void ConfigTimer1(u8 ms) { u32 temp; temp=11059200/12; temp=(temp*ms)/1000; temp=65535-temp; TR0H=(u8)(temp>>8); TR0L=(u8)temp; TMOD&=0XF0; TMOD|=0x10; TH1=TR0H; TL1=TR0L; ET1=1; TR1=1; } //pwm配置程序 void ConfigPWM(u16 fr, u8 dc) { u16 high, low; PeriodCnt = (11059200/12)/fr; high = (PeriodCnt*dc)/100; low = PeriodCnt - high; high = 65536 - high; low = 65536 - low; HighRH = (u8)(high>>8); HighRL = (u8)high; LowRH = (u8)(low>>8); LowRL = (u8)low; TMOD &= 0xF0; TMOD |= 0x01; TH0 = HighRH; TL0 = HighRL; ET0 = 1; TR0 = 1; PWMA = 1; } //pwm中断程序 void InterruptTimer0() interrupt 1 { if(PWMA == 1) { TH0 = LowRH; TL0 = LowRL; PWMA = 0; } else { TH0 = HighRH; TL0 = HighRL; PWMA = 1; } } void Timer1()interrupt 3 { static u8 times=0; TH1=TR0H; TL1=TR0L; times++; if(times>200) { times=0; flag_1s=1; } }验证完成 |
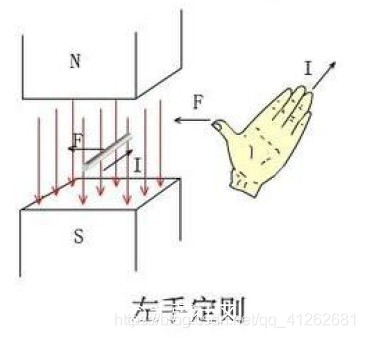 通电导线处于磁场中时,所受安培力 F (或运动)的方向、磁感应强度B的方向 以及通电导体棒的电流I三者方向之间的关系的定律。 简而言之,让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力的方向
通电导线处于磁场中时,所受安培力 F (或运动)的方向、磁感应强度B的方向 以及通电导体棒的电流I三者方向之间的关系的定律。 简而言之,让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力的方向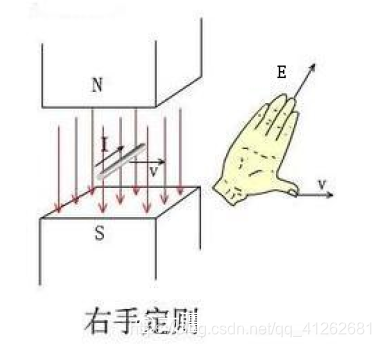 右手定则,是产生感生电动势,也是发电机的原理 让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生的电动势方向。
右手定则,是产生感生电动势,也是发电机的原理 让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生的电动势方向。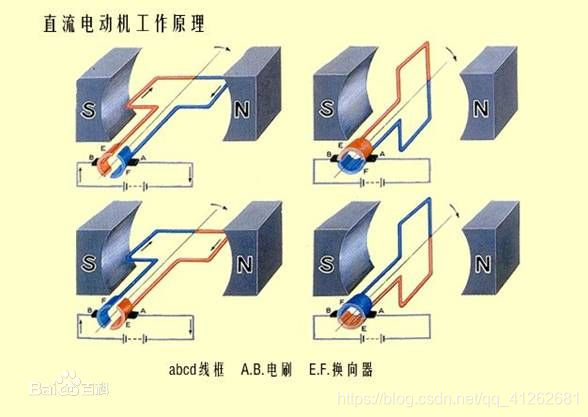 直流电机里边固定有环状永磁体,电流通过转子上的线圈产生安培力,当转子上的线圈与磁场平行时,再继续转受到的磁场方向将改变,因此此时转子末端的电刷跟转换片交替接触,从而线圈上的电流方向也改变,产生的洛伦兹力方向不变,所以电机能保持一个方向转动。
直流电机里边固定有环状永磁体,电流通过转子上的线圈产生安培力,当转子上的线圈与磁场平行时,再继续转受到的磁场方向将改变,因此此时转子末端的电刷跟转换片交替接触,从而线圈上的电流方向也改变,产生的洛伦兹力方向不变,所以电机能保持一个方向转动。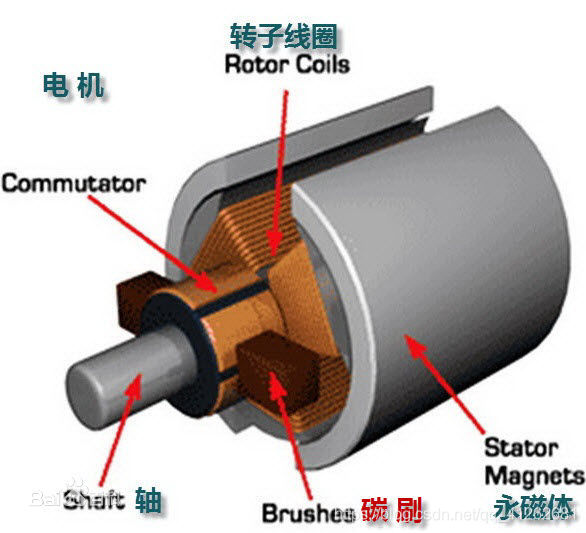 有刷电机,顾名思义,就是有刷子,主要作用就是让中间的转子与电源有电气连接,还可以转动 为了让两者之间既有接触,能导电;又有转动,实现电流的变相,一般的常见做法是在碳刷加一个弹簧。这样,换向器与碳刷便有了频繁的摩擦。所以碳刷很容易磨损,必须经常进行更换。并且磨损掉的碳渣渣在电机里面形成了积碳,需要经常清理。
有刷电机,顾名思义,就是有刷子,主要作用就是让中间的转子与电源有电气连接,还可以转动 为了让两者之间既有接触,能导电;又有转动,实现电流的变相,一般的常见做法是在碳刷加一个弹簧。这样,换向器与碳刷便有了频繁的摩擦。所以碳刷很容易磨损,必须经常进行更换。并且磨损掉的碳渣渣在电机里面形成了积碳,需要经常清理。 图左为内转子,图右为外转子
图左为内转子,图右为外转子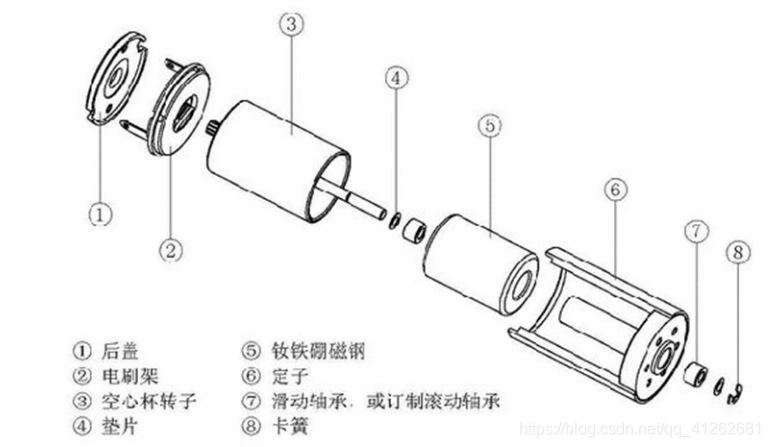
 齿轮减速器体积较小,传递扭矩大,但是有一定的回程间隙。 蜗轮蜗杆减速机的主要特点是具有反向自锁功能,可以有较大的减速比,但是一般体积较大,传动效率不高,精度不高。 行星减速器其优点是结构比较紧凑,回程间隙小、精度较高,使用寿命很长,额定输出扭矩可以做的很大,但价格略贵。
齿轮减速器体积较小,传递扭矩大,但是有一定的回程间隙。 蜗轮蜗杆减速机的主要特点是具有反向自锁功能,可以有较大的减速比,但是一般体积较大,传动效率不高,精度不高。 行星减速器其优点是结构比较紧凑,回程间隙小、精度较高,使用寿命很长,额定输出扭矩可以做的很大,但价格略贵。
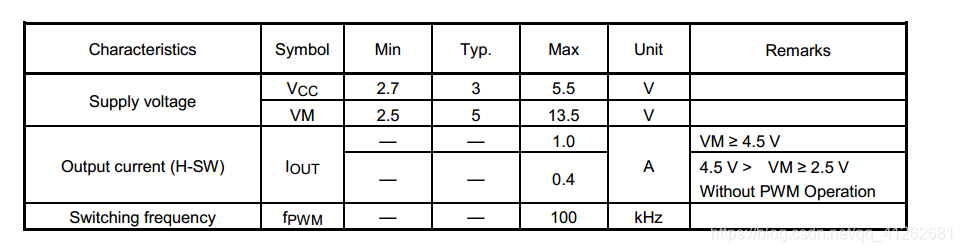
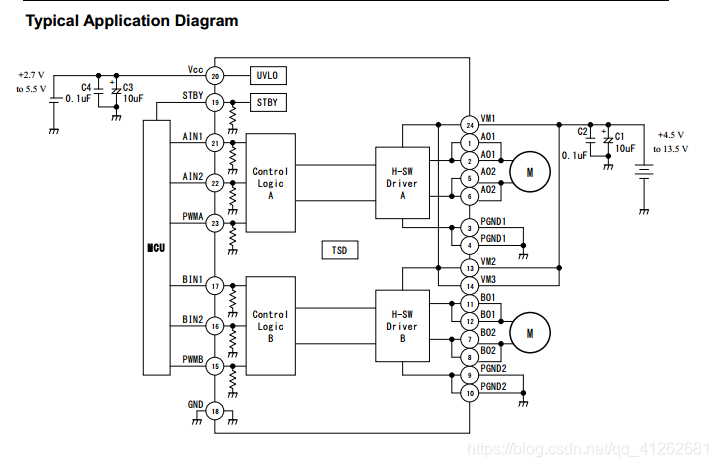
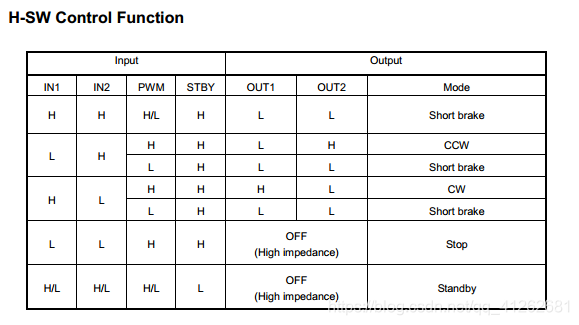 VM:如上图,电机供电,范围2.5-13.5v VCC:芯片供电,范围2.7-5.5v GND接地 AIN1,AIN2:电机方向控制,接单片机 BIN1,BIN2同A PWMA,PWMB:电机调速控制,接单片机 AO1AO2:接电机的正负 BO1,BO2:同A
VM:如上图,电机供电,范围2.5-13.5v VCC:芯片供电,范围2.7-5.5v GND接地 AIN1,AIN2:电机方向控制,接单片机 BIN1,BIN2同A PWMA,PWMB:电机调速控制,接单片机 AO1AO2:接电机的正负 BO1,BO2:同A
【本文地址】
今日新闻 |
推荐新闻 |