【meArm机械臂】第一篇·结构设计及搭建 |
您所在的位置:网站首页 › 电机3D图纸 › 【meArm机械臂】第一篇·结构设计及搭建 |
【meArm机械臂】第一篇·结构设计及搭建
|
系列文章目录
【meArm机械臂】第一篇·结构设计及搭建 【meArm机械臂】第二篇·Arduino控制程序 文章目录 系列文章目录前言一、机械臂搭建1.结构分析a.底盘b.大臂c.小臂d.钳子e.其他精巧设计 2.组装 二、结构设计1.SolidWorks收获(1)块的使用(2)钳子齿轮的设计(3)钳子特征的设计(4)子装配体(5)齿轮配合及角度限制 2.仿真建模 总结 前言meArm机械臂是github上的一个开源项目,在初学Arduino时,对于帮助新手快速入门相关知识,完成自己的第一个小项目非常有帮助。 题主也是在看太极创客视频学习Arduino时,开始的这个项目,meArm的零件图纸及程序在github上式完全开源的,我是在网上买的亚克力板零件材料,然后自己进行的组装,然后根据事物,使用Solidworks2020进行了重新设计,并使用Matlab进行了仿真,现在在CSDN上对开发过程进行一些记录和总结。 一、机械臂搭建 1.结构分析meArm机械臂看似组成非常简单,但是仔细分析一下,其中还是包含很多精巧的设计的,至少对于一个菜鸡大学生是有这样的感叹的。 这款机械臂不是现在市面上最常用和广泛的六轴机械臂,而是更为简单的四轴机械臂,由底盘、大臂、小臂、钳子组成。 a.底盘底座和中座之间使用25mm的M3螺母支撑起来,由一个SG90的舵机驱动进行旋转,电机轴和中座之间用类似花键的结构进行耦合。
大臂设计在中座的右侧,由一个SG90的舵机驱动,带动大臂连杆进行旋转,大臂左右有两个连杆,两个连杆之间由一个连接板连接起来,大臂和连接板连接时,采用图中这样的紧固方式,是我没想到的,将凹槽设计的与螺栓长度相同,使螺栓拧紧时螺母和螺栓都能恰巧顶到连板,使连接可靠,同时设计了两个紧固结构和四个插槽,保证连接稳定性。 小臂的设计我认为很精巧,他是将SG90驱动舵机放置在了中座的左侧,然后电机轴通过花键与小臂曲柄连接,然后通过曲柄摇杆结构(其实是特殊情况:平行四边形结构)带动从动摇臂旋转,实现小臂的旋转,这样的设计可以减轻小臂的承重,对于亚克力板以及SG90这样小驱动力的电机非常合适。 钳子的主要结构就是通过齿轮传动实现钳子的开合,SG90电机与第一级齿轮通过花键连接,一二级齿轮间耦合传动,二级齿轮与右钳通过螺栓连接在一起,从而带动钳子的开合,左右两个钳之间也通过齿轮连接,从动齿轮,只负责两边钳子的转动耦合。 让我有所收获的是类似这样的走线口结构,考虑了钳子舵机的控制走线问题,将舵机线按走线孔缠绕,防止舵机线对机械臂运动的干扰。 最后就是设计时需要注意中座前后挡板的高度,要注意为大臂和小臂驱动杆的运动流出空间,不要发生干涉情况,这样可以提高机械臂的运动范围。 2.组装在组装过程中,有一些结构的设计,就凸显出了亚克力板材料的优点和局限性了,比如原设计者应该是想减少螺母的使用,或者防止螺母对运动的阻碍,将大部分孔设计为M3的孔,而特意将某些(终止)孔设计为略小于M3,这样在拧螺栓时,可以通过这样的预紧力紧固,而不需要使用螺母,而这样的设计也有一些缺点: 复用性差:亚克力板材料本身就比较易磨损,在拧螺栓时,如果进行反复的拆卸,会撑开此孔,使紧固性变差可靠性差:亚克力板材料本身相对金属材料较为脆弱,并且在开孔处为应力集中处,在开孔处再施加以预紧力,更加使机构可靠性变差,而如果使用螺母连接,则可以将预紧力变为零件表面的摩擦力,增加了可靠性误差敏感:在组装钳子的过程中,传动齿轮与右钳进行连接时,就使用的这种紧固方式,理论上是使用M3×8的螺栓进行连接,但螺栓其实也有误差,我在使用M3×8的螺栓进行连接时就极容易脱落,而换成M3×10的螺栓则连接的比较紧固。另外就是在组装过程中也有几点需要注意: 在整个组装过程中不要用力过大,特别是在拧螺栓的时候,用力过大可能会将零件撑坏在组装中座时,原件是将中座分为了四部分,中间还有一个“小猪”,但是在中座与底座电机连接时,要用一个小螺栓连接拧紧,这时不要按装配说明上的顺序装,可以先拧紧螺母,再安装中做座,安装中座时可能需要3-4只手在拧小臂曲柄连杆结构的螺栓时,不要拧的太近,摩擦力过大的话,可能会导致电机带不动 二、结构设计 1.SolidWorks收获 (1)块的使用在设计电机与零件连接的花键结构时,我是想设计一个圆形键,虽然步骤很简单,就是画圆→在圆上三点画圆弧→阵列→拉伸切除,但是每次都这样设计还是很麻烦,考虑到复用性,我想到了当时学CAD时有块的使用,在Solidworks上一找真有这样的用法,于是我将草图保存成了单独一个块,在每次需要时,插入块,然后重新选择块草图的基准面即可快速完成该操作。 具体操作在:工具→块→创建块→插入块 (2)钳子齿轮的设计在设计钳子的齿轮时,我本来想自己画一个齿轮,但在网上搜索画齿轮的方法时,属实是麻烦,还需要用函数…于是我还是决定用Toolboxs中的齿轮零件改装,具体做法是,一定要先在装配体中测量好齿轮中心间距,选择分度圆直径,设置好齿轮参数之后,在创建成独立的零件,这样生成的零件直接就是设置好的尺寸,然后在进行相应的设计加工即可完成钳子的设计。 (3)钳子特征的设计
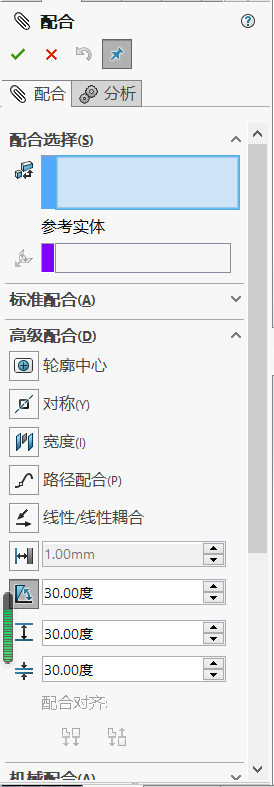
在进行总装配体组装之前,可以先将整个机构分解为几个子结构,完成各个子装配体的装配,最后再讲子装配体汇总到总装配体中,但是如果调入的还是子装配体的话,在总装配体中子装配体的各个零件直接无法相对移动,这时可以将子装配体解散,然后将子装配体的零件收入到一个文件中中方便管理,然后在各个子装配体设置好配合关系,即可实现相对运动。 (5)齿轮配合及角度限制在进行齿轮的配合时,需要选择机械配合中的,齿轮配合,然后选择一个齿轮的齿顶圆和另一个齿轮的齿根圆,这样即可完成配合。 每个舵机都有自己的限制角,这可以在SolidWorks中的 配合→高级配合→角度 进行配合限制,其实也没必要,可以在进行仿真时再进行参数调制。 仿真主要是需要将SolidWorks模型转为URDF模型,然后在Matlab中就能调入该模型,使用SWtoURDF的插件即可实现,具体操作步骤见这篇文章,写的很好! 然后常规的机械臂建模有标准DH法和改进DH法: 标准DH法:建模顺序 θ→d→a→α改进DH法:建模顺序 α→a→θ→d参数说明: θ:绕z轴转角 d:延z轴移动距离 a:延x轴移动距离 α:绕x轴转角 关于这一部分的知识是机器人学的内容 总结虽然这个机械臂结构还蛮简单的,但在组装过程中还是学到了很多知识,有很多收获,机械臂目前是用Arduino驱动的,但随着知识的深入,我也会尝试更复杂的控制方法和通讯方式,这看似是机械臂的一小步,但却是我的一大步,最后附上机械臂照片,继续加油! |




 在左右两条小臂之间,加了一个鹰钩连接凹槽的连板,并且在小臂上加了一块三角连板,三角连板连接两条从动杆,这样可以保证小臂连杆的稳定性,也可以保证在小臂与钳子连接的稳定性。
在左右两条小臂之间,加了一个鹰钩连接凹槽的连板,并且在小臂上加了一块三角连板,三角连板连接两条从动杆,这样可以保证小臂连杆的稳定性,也可以保证在小臂与钳子连接的稳定性。 

 钳子与小臂连接时,原设计是在钳子的舵机板之间加了两个小连接片,连接片被卡在上下两个舵机板之间进行固定,在我的设计中,为了简化也是为了优化,我将舵机板改为舵机盒,在舵机盒上开孔,与小臂之间进行连接。
钳子与小臂连接时,原设计是在钳子的舵机板之间加了两个小连接片,连接片被卡在上下两个舵机板之间进行固定,在我的设计中,为了简化也是为了优化,我将舵机板改为舵机盒,在舵机盒上开孔,与小臂之间进行连接。 
 然后再就是,我在设计夹持钳子时,考虑到夹持的稳定性以及摩擦力,为钳子进行了优化,不过这样的话使用激光切割很难切出这样的特征,但也可以当做增大摩擦力的借鉴。
然后再就是,我在设计夹持钳子时,考虑到夹持的稳定性以及摩擦力,为钳子进行了优化,不过这样的话使用激光切割很难切出这样的特征,但也可以当做增大摩擦力的借鉴。  还有原设计者在设计一些阵列连接孔时,将几个孔的位置分布故意不对称,这样可以确保使用者在组装时的唯一性,防止装反。
还有原设计者在设计一些阵列连接孔时,将几个孔的位置分布故意不对称,这样可以确保使用者在组装时的唯一性,防止装反。 先在平面上建立草图,画一个三角形,并标注好尺寸,在凸台拉伸时,设置一定的拔模角度和拉伸高度,使之成为想要的单个特征,然后进行阵列,选择阵列的方向和参考位置或数量,即可设计成类似特征。
先在平面上建立草图,画一个三角形,并标注好尺寸,在凸台拉伸时,设置一定的拔模角度和拉伸高度,使之成为想要的单个特征,然后进行阵列,选择阵列的方向和参考位置或数量,即可设计成类似特征。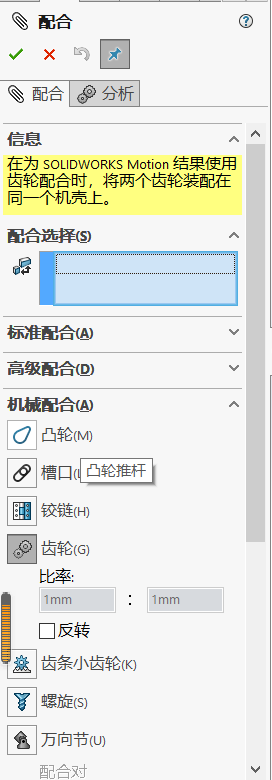

【本文地址】
今日新闻 |
推荐新闻 |