【运动控制】直流电机的建模与位置控制和力控制 |
您所在的位置:网站首页 › 电动机仿真模型怎么做 › 【运动控制】直流电机的建模与位置控制和力控制 |
【运动控制】直流电机的建模与位置控制和力控制
|
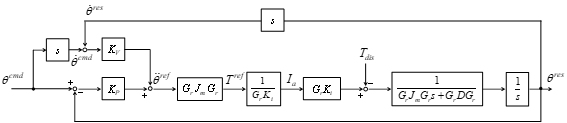
对于机器人控制,还有一个很重要的部分就是电机控制。本篇博文以单电机带单杆为对象进行说明。其中观测器为提高机器人的鲁棒性。 注意本篇博文认为控制力矩=输出力矩,也就是说驱动器是完美的。 因此就不考虑整体模型的电气部分,只考虑电机的运动模型和控制器模型。 同时本篇博文在机器人的运动控制中认为,连杆质量和惯性是微不足道的,不会影响独立运动控制性能,也就是说本篇博文考虑的是属于分散式控制——Decentralized Control。 电机建模考虑减速比Gr,噪声Tdis,转动惯量Jm和粘滞摩擦D的电机模型如下图所示: 
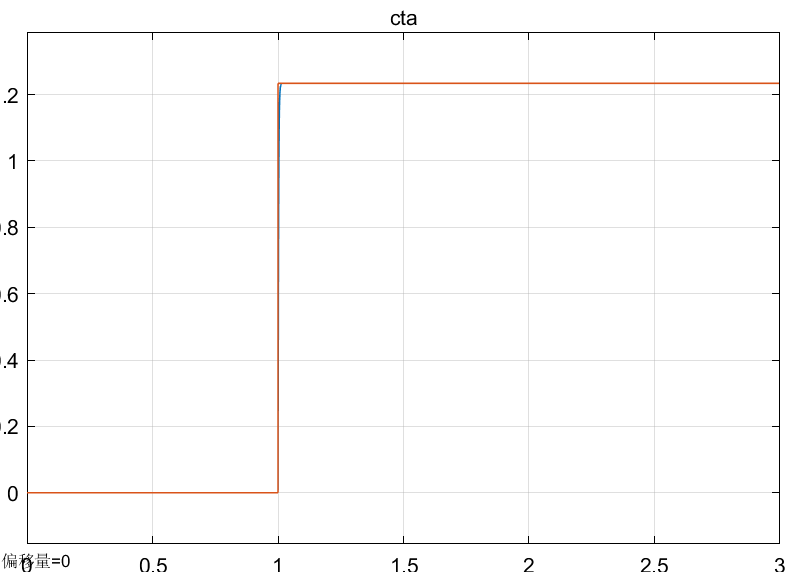
在实际控制中,粘滞摩擦的影响比较小因此可以不考虑。 下面讨论控制相关,有关PID控制的基础可以参考->【运动控制】经典控制理论——PID控制 位置控制这里使用PD控制器对电机进行控制。控制框图如下所示: PD控制器的比例增益和微分增益的选择将会影响到控制系统的阻尼状态。 为了观察方便这里不考虑Tdis,以下图片橘色为指令,蓝色为实际。 过阻尼 Kv>2*sqrt(Kp) 欠阻尼 Kv |
【本文地址】
今日新闻 |
推荐新闻 |