A星算法求解8数码问题实验.docx |
您所在的位置:网站首页 › 用流程图表示求解n! › A星算法求解8数码问题实验.docx |
A星算法求解8数码问题实验.docx
|
A星算法求解8数码问题实验.docx 《A星算法求解8数码问题实验.docx》由会员分享,可在线阅读,更多相关《A星算法求解8数码问题实验.docx(17页珍藏版)》请在冰豆网上搜索。
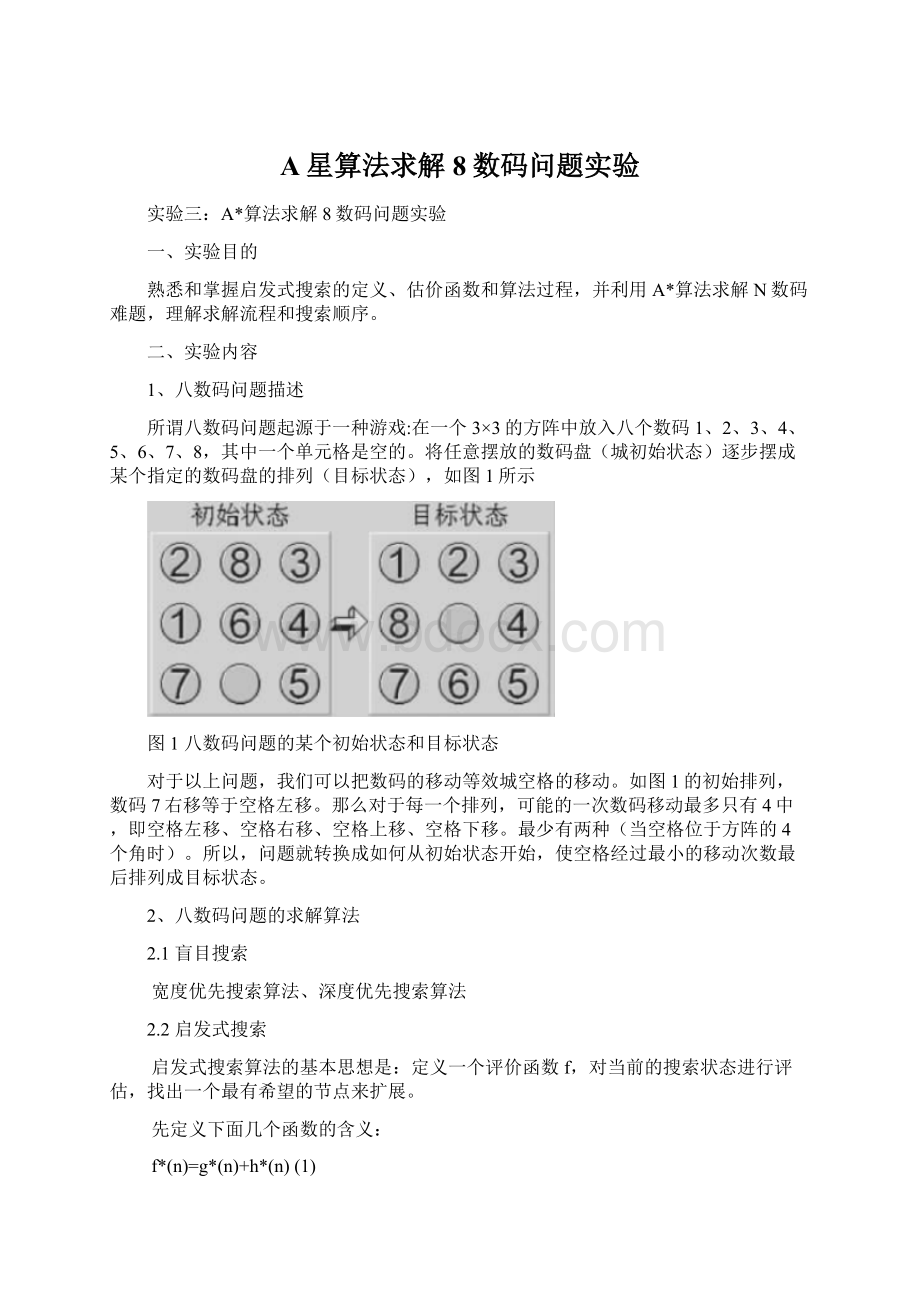
A星算法求解8数码问题实验 实验三: A*算法求解8数码问题实验 一、实验目的 熟悉和掌握启发式搜索的定义、估价函数和算法过程,并利用A*算法求解N数码难题,理解求解流程和搜索顺序。 二、实验内容 1、八数码问题描述 所谓八数码问题起源于一种游戏: 在一个3×3的方阵中放入八个数码1、2、3、4、5、6、7、8,其中一个单元格是空的。 将任意摆放的数码盘(城初始状态)逐步摆成某个指定的数码盘的排列(目标状态),如图1所示 图1八数码问题的某个初始状态和目标状态 对于以上问题,我们可以把数码的移动等效城空格的移动。 如图1的初始排列,数码7右移等于空格左移。 那么对于每一个排列,可能的一次数码移动最多只有4中,即空格左移、空格右移、空格上移、空格下移。 最少有两种(当空格位于方阵的4个角时)。 所以,问题就转换成如何从初始状态开始,使空格经过最小的移动次数最后排列成目标状态。 2、八数码问题的求解算法 2.1盲目搜索 宽度优先搜索算法、深度优先搜索算法 2.2启发式搜索 启发式搜索算法的基本思想是: 定义一个评价函数f,对当前的搜索状态进行评估,找出一个最有希望的节点来扩展。 先定义下面几个函数的含义: f*(n)=g*(n)+h*(n) (1) 式中g*(n)表示从初始节点s到当前节点n的最短路径的耗散值;h*(n)表示从当前节点n到目标节点g的最短路径的耗散值,f*(n)表示从初始节点s经过n到目标节点g的最短路径的耗散值。 评价函数的形式可定义如 (2)式所示: f(n)=g(n)+h(n) (2) 其中n是被评价的当前节点。 f(n)、g(n)和h(n)分别表示是对f*(n)、g*(n)和h*(n)3个函数值的估计值。 利用评价函数f(n)=g(n)+h(n)来排列OPEN表节点顺序的图搜索算法称为算法A。 在A算法中,如果对所有的x, h(x) 成立,则称好h(x)为h*(x)的下界,它表示某种偏于保守的估计。 采用h*(x)的下界h(x)为启发函数的A算法,称为A*算法。 针对八数码问题启发函数设计如下: f(n)=d(n)+p(n)(4) 其中A*算法中的g(n)根据具体情况设计为d(n),意为n节点的深度,而h(n)设计为 是 图2A*算法流程图 p(n),意为放错的数码与正确的位置距离之和。 由于实际情况中,一个将牌的移动都是单步进行的,没有交换拍等这样的操作。 所以要把所有的不在位的将牌,移动到各自的目标位置上,至少要移动从他们各自的位置到目标位置的距离和这么多次,所以最有路径的耗散值不会比该值小,因此该启发函数h(n)满足A*算法的条件。 3、A*算法流程图,如图2 4、A*算法总结 4.1,把起始状态添加到开启列表。 4.2,重复如下工作: a)寻找开启列表中f值最低的节点,我们称它为BESTNOE b)把它切换到关闭列表中。 c)对相邻的4个节点中的每一个 *如果它不在开启列表,也不在关闭列表,把它添加到开启列表中。 把BESTNODE作为这一节点的父节点。 记录这一节点的f和g值 *如果它已在开启或关闭列表中,用g值为参考检查新的路径是否更好。 更低的g值意味着更好的路径。 如果这样,就把这一节点的父节点改为BESTNODE,并且重新计算这一节点的f和g值,如果保持开启列表的f值排序,改变之后需要重新对开启列表排序。 d)停止 把目标节点添加到关闭列表,这时候路径被找到,或者没有找到路径,开启列表已经空了,这时候路径不存在。 4.3,保存路径。 从目标节点开始,沿着每一节点的父节点移动直到回到起始节点。 这就是求得的路径。 5、数据结构 采用结构体来保存八数码的状态、f和g的值以及该节点的父节点; structNode{ ints[3][3];//保存八数码状态,0代表空格 intf,g;//启发函数中的f和g值 structNode*next; structNode*previous;//保存其父节点 }; 6、实验结果,如图3所示 图3A*算法求解八数码问题实验结果 7、源代码 //----------------------------------------------------------------------------- //代码: 利用A*算法求解八数码问题。 //八数码问题的启发函数设计为: f(n)=d(n)+p(n),其中A*算法中的g(n)根据具体情况设计为d(n),意为n节点的深度,而h(n)设计为p(n),意为放错的数码与正确的位置距离之和。 //后继结点的获取: 数码的移动等效为空格的移动。 首先判断空格上下左右的可移动性,其次移动空格获取后继结点。 //----------------------------------------------------------------------------- #include #include #include //八数码状态对应的节点结构体 structNode{ ints[3][3];//保存八数码状态,0代表空格 intf,g;//启发函数中的f和g值 structNode*next; structNode*previous;//保存其父节点 }; intopen_N=0;//记录Open列表中节点数目 //八数码初始状态 intinital_s[3][3]={ 2,8,3, 1,6,4, 7,0,5 }; //八数码目标状态 intfinal_s[3][3]={ 1,2,3, 8,0,4, 7,6,5 }; //------------------------------------------------------------------------ //添加节点函数入口,方法: 通过插入排序向指定表添加 //------------------------------------------------------------------------ voidAdd_Node(structNode*head,structNode*p) { structNode*q; if(head->next)//考虑链表为空 {q=head->next; if(p->fnext->f){//考虑插入的节点值比链表的第一个节点值小 p->next=head->next; head->next=p; } else{ while(q->next)//考虑插入节点x,形如a { if((q->ff||q->f==p->f)&&(q->next->f>p->f||q->next->f==p->f)){ p->next=q->next; q->next=p; break; } q=q->next; } if(q->next==NULL)//考虑插入的节点值比链表最后一个元素的值更大 q->next=p; } } elsehead->next=p; } //------------------------------------------------------------------------ //删除节点函数入口 //------------------------------------------------------------------------ voiddel_Node(structNode*head,structNode*p) { structNode*q; q=head; while(q->next) { if(q->next==p){ q->next=p->next; p->next=NULL; if(q->next==NULL)return; //free(p); } q=q->next; } } //------------------------------------------------------------------------ //判断两个数组是否相等函数入口 //------------------------------------------------------------------------ intequal(ints1[3][3],ints2[3][3]) { inti,j,flag=0; for(i=0;i for(j=0;j if(s1[i][j]! =s2[i][j]){flag=1;break;} if(! flag) return1; elsereturn0; } //------------------------------------------------------------------------ //判断后继节点是否存在于Open或Closed表中函数入口 //------------------------------------------------------------------------ intexit_Node(structNode*head,ints[3][3],structNode*Old_Node) { structNode*q=head->next; intflag=0; while(q) if(equal(q->s,s)){ flag=1; Old_Node->next=q; return1;} elseq=q->next; if(! flag)return0; } //------------------------------------------------------------------------ //计算p(n)的函数入口 //其中p(n)为放错位的数码与其正确的位置之间距离之和 //具体方法: 放错位的数码与其正确的位置对应下标差的绝对值之和 //------------------------------------------------------------------------ intwrong_sum(ints[3][3]) { inti,j,fi,fj,sum=0; for(i=0;i for(j=0;j { for(fi=0;fi for(fj=0;fj if((final_s[fi][fj]==s[i][j])){ sum+=fabs(i-fi)+fabs(j-fj); break; } } returnsum; } //------------------------------------------------------------------------ //获取后继结点函数入口 //检查空格每种移动的合法性,如果合法则移动空格得到后继结点 //------------------------------------------------------------------------ intget_successor(structNode*BESTNODE,intdirection,structNode*Successor)//扩展BESTNODE,产生其后继结点SUCCESSOR { inti,j,i_0,j_0,temp; for(i=0;i for(j=0;j Successor->s[i][j]=BESTNODE->s[i][j]; //获取空格所在位置 for(i=0;i for(j=0;j if(BESTNODE->s[i][j]==0){i_0=i;j_0=j;break;} switch(direction) { case0: if((i_0-1)>-1){ temp=Successor->s[i_0][j_0]; Successor->s[i_0][j_0]=Successor->s[i_0-1][j_0]; Successor->s[i_0-1][j_0]=temp; return1; } elsereturn0; case1: if((j_0-1)>-1){ temp=Successor->s[i_0][j_0]; Successor->s[i_0][j_0]=Successor->s[i_0][j_0-1]; Successor->s[i_0][j_0-1]=temp; return1; } elsereturn0; case2: if((j_0+1) temp=Successor->s[i_0][j_0]; Successor->s[i_0][j_0]=Successor->s[i_0][j_0+1]; Successor->s[i_0][j_0+1]=temp; return1; } elsereturn0; case3: if((i_0+1) temp=Successor->s[i_0][j_0]; Successor->s[i_0][j_0]=Successor->s[i_0+1][j_0]; Successor->s[i_0+1][j_0]=temp; return1; } elsereturn0; } } //------------------------------------------------------------------------ //从OPen表获取最佳节点函数入口 //------------------------------------------------------------------------ structNode*get_BESTNODE(structNode*Open) { returnOpen->next; } //------------------------------------------------------------------------ //输出最佳路径函数入口 //------------------------------------------------------------------------ voidprint_Path(structNode*head) { structNode*q,*q1,*p; inti,j,count=1; p=(structNode*)malloc(sizeof(structNode)); //通过头插法变更节点输出次序 p->previous=NULL; q=head; while(q) { q1=q->previous; q->previous=p->previous; p->previous=q; q=q1; } q=p->previous; while(q) { if(q==p->previous)printf("八数码的初始状态: \n"); elseif(q->previous==NULL)printf("八数码的目标状态: \n"); elseprintf("八数码的中间态%d\n",count++); for(i=0;i for(j=0;j { printf("%4d",q->s[i][j]); if(j==2)printf("\n"); } printf("f=%d,g=%d\n\n",q->f,q->g); q=q->previous; } } //------------------------------------------------------------------------ //A*子算法入口: 处理后继结点 //------------------------------------------------------------------------ voidsub_A_algorithm(structNode*Open,structNode*BESTNODE,structNode*Closed,structNode*Successor) { structNode*Old_Node=(structNode*)malloc(sizeof(structNode)); Successor->previous=BESTNODE;//建立从successor返回BESTNODE的指针 Successor->g=BESTNODE->g+1;//计算后继结点的g值 //检查后继结点是否已存在于Open和Closed表中,如果存在: 该节点记为old_Node,比较后继结点的g值和表中old_Node节点 //g值,前者小代表新的路径比老路径更好,将Old_Node的父节点改为BESTNODE,并修改其f,g值,后者小则什么也不做。 //即不存在Open也不存在Closed表则将其加入OPen表,并计算其f值 if(exit_Node(Open,Successor->s,Old_Node)){ if(Successor->gg){ Old_Node->next->previous=BESTNODE;//将Old_Node的父节点改为BESTNODE Old_Node->next->g=Successor->g;//修改g值 Old_Node->next->f=Old_Node->g+wrong_sum(Old_Node->s);//修改f值 //排序~~~~~~~~~~~~~~~~~~ del_Node(Open,Old_Node); Add_Node(Open,Old_Node); } } elseif(exit_Node(Closed,Successor->s,Old_Node)){ if(Successor->gg){ Old_Node->next->previous=BESTNODE; Old_Node->next->g=Successor->g; Old_Node->next->f=Old_Node->g+wrong_sum(Old_Node->s); //排序~~~~~~~~~~~~~~~~~~ del_Node(Closed,Old_Node); Add_Node(Closed,Old_Node); } } else{ Successor->f=Successor->g+wrong_sum(Successor->s); Add_Node(Open,Successor); open_N++; } } //------------------------------------------------------------------------ //A*算法入口 //八数码问题的启发函数为: f(n)=d(n)+p(n) //其中A*算法中的g(n)根据具体情况设计为d(n),意为n节点的深度,而h(n)设计为p(n), //意为放错的数码与正确的位置距离之和 //------------------------------------------------------------------------ voidA_algorithm(structNode*Open,structNode*Closed)//A*算法 { inti,j; structNode*BESTNODE,*inital,*Successor; inital=(structNode*)malloc(sizeof(structNode)); //初始化起始节点 for(i=0;i for(j=0;j inital->s[i][j]=inital_s[i][j]; inital->f=wrong_sum(inital_s); inital->g=0; inital->previous=NULL; inital->next=NULL; Add_Node(Open,inital);//把初始节点放入OPEN表 open_N++; while (1) { if(open_N==0){printf("failure! ");return;} else{ BESTNODE=get_BESTNODE(Open);//从OPEN表获取f值最小的BESTNODE,将其从OPEN表删除并加入CLOSED表中 del_Node(Open,BESTNODE); open_N--; Add_Node(Closed,BESTNODE); if(equal(BESTNODE->s,final_s)){//判断BESTNODE是否为目标节点 printf("success! \n"); print_Path(BESTNODE); return; } //针对八数码问题,后继结点Successor的扩展方法: 空格(二维数组中的0)上下左右移动, //判断每种移动的有效性,有效则转向A*子算法处理后继节点,否则进行下一种移动 else{ Successor=(structNode*)malloc(sizeof(structNode));Successor->next=NULL; if(get_successor(BESTNODE,0,Successor))sub_A_algorithm(Open,BESTNODE, |
【本文地址】
今日新闻 |
推荐新闻 |