目标检测的评价指标(Iou,mAP,Fps) |
您所在的位置:网站首页 › 瓷砖检测指标是什么意思 › 目标检测的评价指标(Iou,mAP,Fps) |
目标检测的评价指标(Iou,mAP,Fps)
|
一、交并比
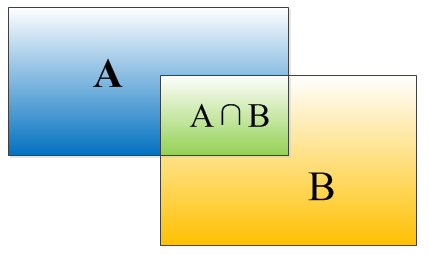
物体检测需要定位出物体的bounding box,就像下面的图片一样,我们不仅要定位出车辆的bounding box 我们还要识别出bounding box 里面的物体就是车辆。对于bounding box的定位精度,有一个很重要的概念,因为我们算法不可能百分百跟人工标注的数据完全匹配,因此就存在一个定位精度评价公式:IOU。 IOU定义了两个bounding box的重叠度,如下图所示: 矩形框A、B的一个重合度IOU计算公式为: IOU=(A∩B)/(A∪B) 就是矩形框A、B的重叠面积占A、B并集的面积比例: IOU=SI/(SA+SB-SI) 二、mAP(均值平均精度)我们使用loU看检测是否正确需要设定一个阈值,最常用的阈值是0.5,即如果loU>0.5,则认为是真实的检测(true detection),否则认为是错误的检测(false detection)。我们现在计算模型得到的每个检测框(置信度阈值后)的loU值。用计算出的loU值与设定的loU阈值(例如0.5)比较,就可以计算出每个图像中每个类的正确检测次数(A)。对于每个图像,我们都有ground truth的数据(即知道每个图像的真实目标信息),因此也知道了该图像中给定类别的实际目标(B)的数量。我们也计算了正确预测的数量(A)(True possitive)。因此: 对于一类物体在一张图像上的精度: 即给定一张图像的类别C的Precision=图像正确预测(True Positives)的数量 / 在图像张这一类的总的目标数量。 对于一类物体在所有图上的精度: 假如现在有一个给定的类,验证集中有100个图像,并且我们知道每个图像都有其中的所有类(基于ground truth)。所以我们可以得到100个精度值,计算这100个精度值的平均值,得到的就是该类的平均精度。 即一个C类的平均精度=在验证集上所有的图像对于类C的精度值的和 / 有类C这个目标的所有图像的数量。 对于所有类物体在所有图上的精度: 现在假如我们整个集合中有20个类,对于每个类别,我们都先计算loU,接下来计算精度,然后计算平均精度。所有我们现在有20个不同的平均精度值。使用这些平均精度值,我们可以轻松的判断任何给定类别的模型的性能。 但是问题是使用20个不同的平均精度使我们难以度量整个模型,所以我们可以选用一个单一的数字来表示一个模型的表现(一个度量来统一它们),我们可以取所有类的平均精度值的平均值,即MAP(均值平均精度)。 mAP=所有类别的平均精度求和除以所有类别,即数据集中所有类的平均精度的平均值。 使用mAP值时我们需要满足一下条件: (1) mAP总是在固定的数据集上计算 (2)它不是量化模型输出的绝对度量,但是是一个比较好的相对度量。当我们在流行的公共数据集上计算这个度量时,这个度量可以很容易的用来比较不同目标检测方法 (3)根据训练中类的分布情况,平均精度值可能会因为某些类别(具有良好的训练数据)非常高(对于具有较少或较差数据的类别)而言非常低。所以我们需要mAP可能是适中的,但是模型可能对于某些类非常好,对于某些类非常不好。因此建议在分析模型结果的同时查看个各类的平均精度,这些值也可以作为我们是不是需要添加更多训练样本的一个依据。 三、检测速率(Fps)1秒内识别的图像数(帧数) 四、IOU的python实现具体实现过程请移步:https://www.pyimagesearch.com/2016/11/07/intersection-over-union-iou-for-object-detection/ # import the necessary packages from collections import namedtuple import numpy as np import cv2 # define the `Detection` object Detection = namedtuple("Detection", ["image_path", "gt", "pred"]) def bb_intersection_over_union(boxA, boxB): # determine the (x, y)-coordinates of the intersection rectangle xA = max(boxA[0], boxB[0]) yA = max(boxA[1], boxB[1]) xB = min(boxA[2], boxB[2]) yB = min(boxA[3], boxB[3]) # compute the area of intersection rectangle interArea = max(0, xB - xA + 1) * max(0, yB - yA + 1) # compute the area of both the prediction and ground-truth # rectangles boxAArea = (boxA[2] - boxA[0] + 1) * (boxA[3] - boxA[1] + 1) boxBArea = (boxB[2] - boxB[0] + 1) * (boxB[3] - boxB[1] + 1) # compute the intersection over union by taking the intersection # area and dividing it by the sum of prediction + ground-truth # areas - the interesection area iou = interArea / float(boxAArea + boxBArea - interArea) # return the intersection over union value return iou # define the list of example detections examples = [ Detection("image_0002.jpg", [39, 63, 203, 112], [54, 66, 198, 114]), Detection("image_0016.jpg", [49, 75, 203, 125], [42, 78, 186, 126]), Detection("image_0075.jpg", [31, 69, 201, 125], [18, 63, 235, 135]), Detection("image_0090.jpg", [50, 72, 197, 121], [54, 72, 198, 120]), Detection("image_0120.jpg", [35, 51, 196, 110], [36, 60, 180, 108])] # loop over the example detections for detection in examples: # load the image image = cv2.imread(detection.image_path) # draw the ground-truth bounding box along with the predicted # bounding box cv2.rectangle(image, tuple(detection.gt[:2]), tuple(detection.gt[2:]), (0, 255, 0), 2) cv2.rectangle(image, tuple(detection.pred[:2]), tuple(detection.pred[2:]), (0, 0, 255), 2) # compute the intersection over union and display it iou = bb_intersection_over_union(detection.gt, detection.pred) cv2.putText(image, "IoU: {:.4f}".format(iou), (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 255, 0), 2) print("{}: {:.4f}".format(detection.image_path, iou)) # show the output image cv2.imshow("Image", image) cv2.waitKey(0)结果: 参考: 【目标识别学习笔记系列】附录一、评价指标(Iou,mAP,Fps) |




【本文地址】