创意小发明:DIY小型激光雕刻机 |
您所在的位置:网站首页 › 猴头制作过程图解视频 › 创意小发明:DIY小型激光雕刻机 |
创意小发明:DIY小型激光雕刻机
|
在其他坛子里偶然看到自制激光雕刻机的视频,心痒痒的也想搞一个,为了节省时间我先买了一个开发板,又找了一些个电脑报废的零件和物品。接下来就开始了从网上淘零件组装雕刻机的过程。 先上成品图: 首先是制作支架 看到有酒盒子做的 拿废光驱壳做的 我是用小米相机的盒子(没有裁切铁皮的工具,就地取材) 底跟盖垂直用螺丝或者胶枪固定 ,然后将两个步进电机 一个用螺丝固定在垂直面 一个固定在水平面 注意用水平仪确定横平竖直,不然雕刻出来的图形就是变形的 在水平面的光驱滑块上面放一块亚克力或者其他平板并用胶枪固定 作为雕刻平台,记得用水平仪调整水平。
用杜邦线将开发板 P1.0-P1.3 P1.4-P1.7 分别接L298N的 In1-In4 将12V电源的正极(圆孔插头中间为正极) 接两个L298N的12V 12V电源负极(插头外面的金属)接两个L298N的GND,再与开发板芯片的GND相接,再与ULN2003的左下角倒数第一个针脚以及激光模组的GND连接起来 从任意一个L298N的 5V引线接ULN2003的右下角倒数第一个针脚 杜邦线将开发板 P2.0 接ULN2003的左下角倒数第二个针脚 ,右下角倒数第二个针脚 接激光正极 将L298N的马达A、B输出接步进电机 A A- B B- (我买的电机是按照 A A- B B-排列的 ,也有不一致的 ,用万用表测电阻 A A- 或者 B B-之间的电阻很小,接错电机抖动不走,换下顺序就好)
上位机软件控制图 附上单片机源程序供您参考: /*z地址定义 50 1=x+,2=x-,3=y+,4=y- 51 前进后退步数高 52 前进后退步数低 53 54/55 字宽 56 57 弱光开关 58/59 激光强度 60 x轴速度 61 y轴速度 62 开始打印0,57 63 暂停 64 停止标志 65 66 左右标记 100开始时灰度图数据 */ #include #define uint unsigned int #define uchar unsigned char #define N z[60] //X速度 #define M z[61] //Y速度 sbit xa=P1^3;//步进电机接线定义 移动激光头 sbit xa_=P1^2; sbit xb=P1^1; sbit xb_=P1^0; sbit a=P1^4; sbit a_=P1^5; sbit b=P1^6; sbit b_=P1^7; /*sbit a=P1^4;//步进电机接线定义 移动底板 sbit a_=P1^5; sbit b=P1^6; sbit b_=P1^7; sbit xa=P1^3; sbit xa_=P1^2; sbit xb=P1^1; sbit xb_=P1^0; */ sbit jg=P2^0; sbit led=P2^1;//指示灯 uchar xdata z[500]={0};//缓存 uchar buff[3];//串口缓存 uchar x1,x0,y1,y0,cont2=0; uchar xfb=4,yfb=4;//走步标志位 unsigned char HighRH = 0; //高电平重载值的高字节 unsigned char HighRL = 0; //高电平重载值的低字节 unsigned char LowRH = 0; //低电平重载值的高字节 unsigned char LowRL = 0; //低电平重载值的低字节 void delayms(uint xms) { uint i,j; for(i=xms;i>0;i–) //i=xms即延时约xms毫秒 for(j=110;j>0;j–); } /* 配置并启动PWM,fr-频率,dc-占空比 */ void ConfigPWM(unsigned int fr, unsigned char dc) { unsigned int high, low; unsigned long tmp; tmp = (11059200/12) / fr; //计算一个周期所需的计数值 high = (tmpdc) / 100; //计算高电平所需的计数值 low = tmp - high; //计算低电平所需的计数值 high = 65536 - high + 12; //计算高电平的重载值并补偿中断延时 low = 65536 - low + 12; //计算低电平的重载值并补偿中断延时 HighRH = (unsigned char)(high>>8); //高电平重载值拆分为高低字节 HighRL = (unsigned char)high; LowRH = (unsigned char)(low>>8); //低电平重载值拆分为高低字节 LowRL = (unsigned char)low; TMOD &= 0xF0; //清零T0的控制位 TMOD |= 0x01; //配置T0为模式1 TH0 = HighRH; //加载T0重载值 TL0 = HighRL; ET0 = 1; //使能T0中断 TR0 = 1; //启动T0 jg = 0; //输出低电平,关闭激光 } / 关闭PWM / void ClosePWM() { TR0 = 0; //停止定时器0 ET0 = 0; //禁止定时器0中断 jg = 0; //输出低电平,关闭激光 } / T0中断服务函数,产生PWM输出 */ void InterruptTimer0() interrupt 1 { if (jg == 0) //当前输出为低电平时,装载高电平值并输出高电平 { TH0 = LowRH; TL0 = LowRL; jg = 1; } else //当前输出为高电平时,装载低电平值并输出低电平 { TH0 = HighRH; TL0 = HighRL; jg = 0; } } void xfor(uint i) //x轴前进函数,前进多少步 { while(1) { if(xfb4) { xa=xb=1; xb_=xa_=0; xfb=1; i–; delayms(N); if(i0){xa=xb=0; break;} } if(xfb1) { xb=xa_=1; xa=xb_=0; xfb=2; i–; delayms(N); if(i0){xa_=xb=0; break;} } if(xfb2) { xa_=xb_=1; xb=xa=0; xfb=3; //走步标志位 i–; delayms(N); if(i0){xa_=xb_=0; break;} } if(xfb3) { xa_=xb=0; xb_=xa=1; xfb=4; i–; delayms(N); if(i0){xa=xb_=0; break;} } } } void xbac(uint i) //xxx后退函数 { while(1) { if(xfb1) { xa_=xb=0; xb_=xa=1; xfb=4; i–; //走步标志位 delayms(N); if(i0){xa=xb_=0; break;} } if(xfb4) { xa_=xb_=1; xb=xa=0; xfb=3; i–; delayms(N); if(i0){xa_=xb_=0; break;} } if(xfb3) { xb=xa_=1; xa=xb_=0; xfb=2; //走步标志位 i–; delayms(N); if(i0){xa_=xb=0; break;} } if(xfb2) { xa=xb=1; xb_=xa_=0; xfb=1; i–; delayms(N); if(i0){xa=xb=0; break;} } } } void yfor(uint i) //y轴前进函数 { while(1) { switch(yfb) { case 4:{a=b=1; b_=a_=0; yfb=1; i–; delayms(M); if(i0){a=b=0;break;}} case 1:{b=a_=1; a=b_=0; yfb=2; i–; delayms(M); if(i0){a_=b=0;break;}} case 2:{a_=b_=1; b=a=0; yfb=3; i–; delayms(M); if(i0){a_=b_=0;break;}} case 3:{b_=a=1; a_=b=0; yfb=4; i–; delayms(M); if(i0){a=b_=0;break;}} } if(i==0) break; } } void ybac(uint i) //yy后退函数 { while(1) { switch(yfb) { case 1:{a=b_=1; b=a_=0; yfb=4; i–; delayms(M); if(i0){a=b_=0;break;}} case 4:{b_=a_=1; a=b=0; yfb=3; i–; delayms(M); if(i0){a_=b_=0;break;}} case 3:{a_=b=1; b_=a=0; yfb=2; i–; delayms(M); if(i0){a_=b=0;break;}} case 2:{b=a=1; a_=b_=0; yfb=1; i–; delayms(M); if(i0){a=b=0;break;}} } if(i==0) break; } } void dazi(uint zik)//打印函数 打印函数已更改 { uint x; jg=1; for(x=0;x |
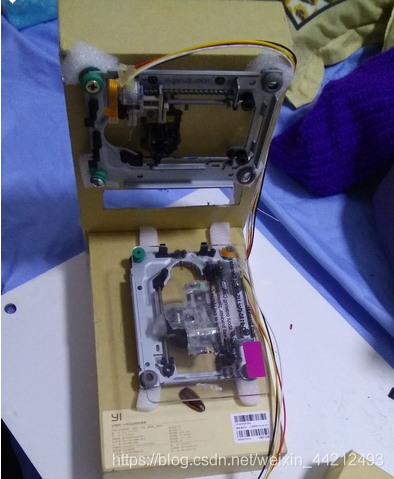 主要配件: 1、从光驱拆的步进电机 2个 我买的是焊接好线的 八九块一个 (注意下焊接的线容易脱落,最好用热熔胶枪固定下焊点位置)
主要配件: 1、从光驱拆的步进电机 2个 我买的是焊接好线的 八九块一个 (注意下焊接的线容易脱落,最好用热熔胶枪固定下焊点位置)  2、手里现有的 51单片机开发板 (51单片机最小系统也可) 3、250mw的激光模组一个 再加一个12mm散热座 三四十左右 4、L298N 步进电机驱动板 2个 六七块钱一个
2、手里现有的 51单片机开发板 (51单片机最小系统也可) 3、250mw的激光模组一个 再加一个12mm散热座 三四十左右 4、L298N 步进电机驱动板 2个 六七块钱一个 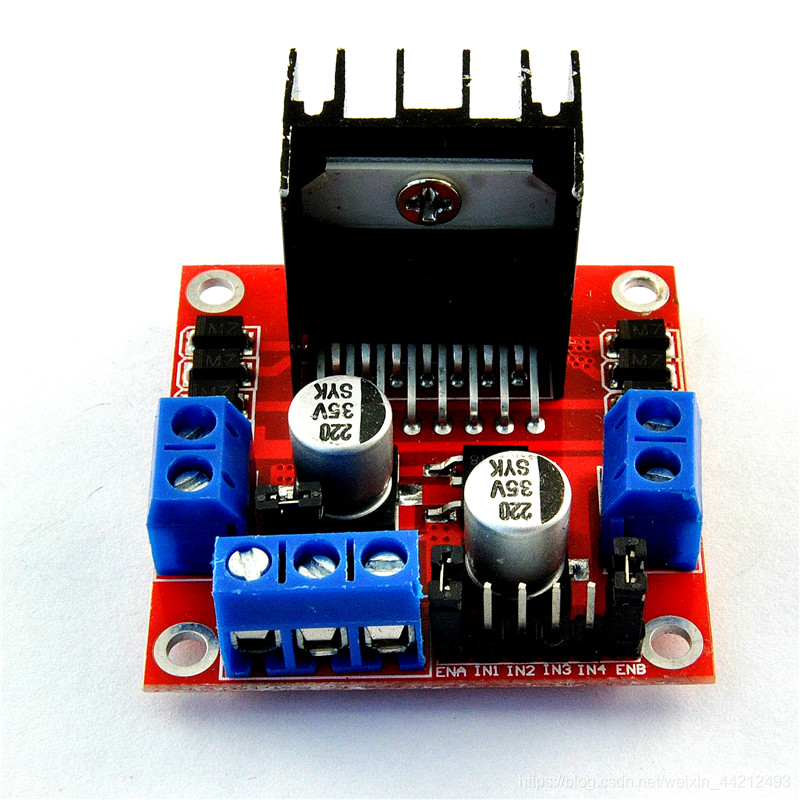 5、杜邦线 公母头 母母头 公公头 若干 (有一部分用导线代替也可以)6、小的水平仪(买电视挂架送的,有些挂画也送)7、路由器交换机的12V电源1个 (我试了下9V也可) 8、ULN2003 一个 我买的6毛一个
5、杜邦线 公母头 母母头 公公头 若干 (有一部分用导线代替也可以)6、小的水平仪(买电视挂架送的,有些挂画也送)7、路由器交换机的12V电源1个 (我试了下9V也可) 8、ULN2003 一个 我买的6毛一个 将激光模块用软铁丝固定在垂直电机的滑块上 ,注意调整激光模块角度确保横平竖直。下面是接线 (自己手工画的,请不要笑 )
将激光模块用软铁丝固定在垂直电机的滑块上 ,注意调整激光模块角度确保横平竖直。下面是接线 (自己手工画的,请不要笑 )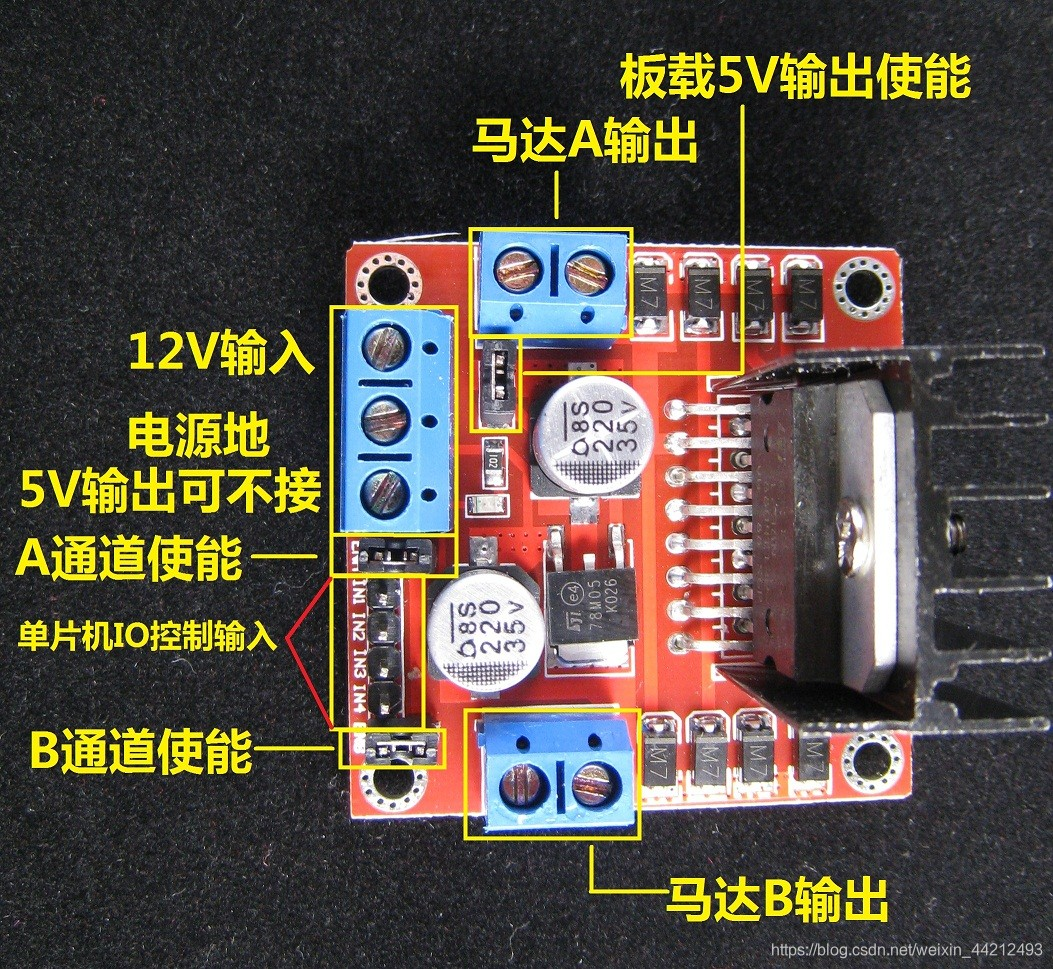 开发板usb口接电脑 烧录程序 打开雕刻程序,选择4800波特率 打开端口 用图片或者文字测试下电机运行情况 。 电机运行方向不对把电机线顺序整体重新换下就好,记得调整激光功率 我的纸箱和木头 30%左右即可雕刻。这是完成图
开发板usb口接电脑 烧录程序 打开雕刻程序,选择4800波特率 打开端口 用图片或者文字测试下电机运行情况 。 电机运行方向不对把电机线顺序整体重新换下就好,记得调整激光功率 我的纸箱和木头 30%左右即可雕刻。这是完成图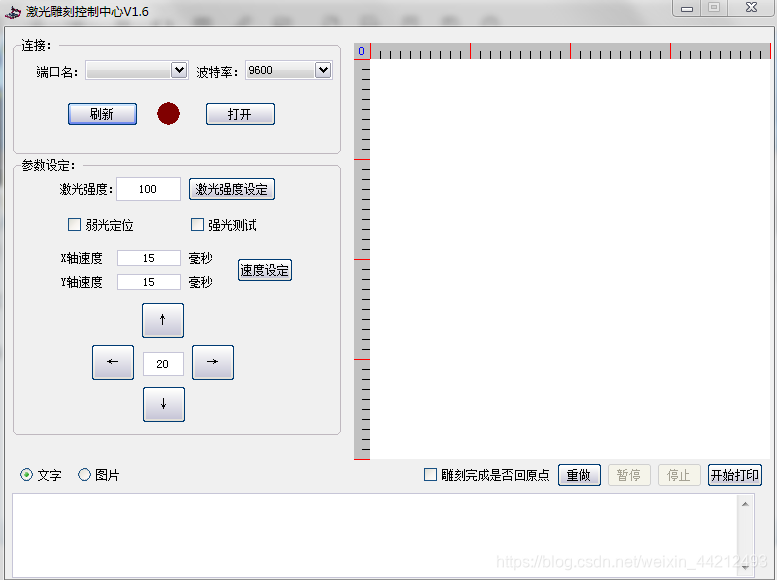 好了就说这么多吧
好了就说这么多吧【本文地址】