ANSYS 有限元分析 加载/求解/输出 |
您所在的位置:网站首页 › 狼族怎么画 › ANSYS 有限元分析 加载/求解/输出 |
ANSYS 有限元分析 加载/求解/输出
|
目 录
Blog Links一、前言二、结构分析2.1 结构分析类型2.2 阻尼定义2.3 求解方法
三、基本概念3.1 荷载分类3.2 荷载步/子步/平衡迭代3.2.1 荷载步3.2.2 子步3.2.3 平衡迭代
3.3 时间参数3.4 加载方式3.5 荷载步选项
四、施加荷载4.1 施加DOF约束4.2 施加集中力4.3 施加表面荷载4.4 施加体积荷载4.5 施加特殊荷载
五、创建荷载步文件六、有限元模型求解6.1 指定求解方法6.2 求解控制对话框6.3 多荷载步的求解6.3.1 实例
6.4 重启动分析6.5 求解前预估
七 输出设置7.1 设置场输出7.2 设置历史输出
八、求解实例8.1 模态分析8.2 预紧工况分析8.3 静力工况分析
十、尾声九、参考文献
Blog Links
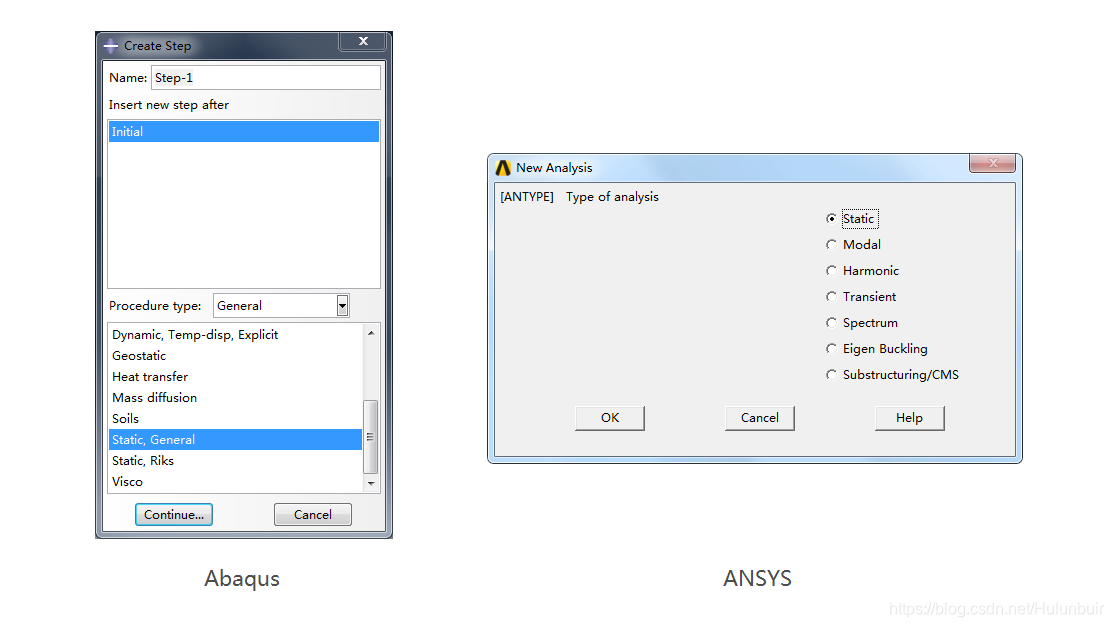
DalNur | 博客总目录 ANSYS 有限元分析 概述 ANSYS 有限元分析 坐标系/工作平面 ANSYS 有限元分析 几何建模 ANSYS 有限元分析 网格划分 ANSYS 有限元分析 选择与组件 ANSYS 有限元分析 修改与编辑 ANSYS 有限元分析 接触分析 ANSYS 有限元分析 加载/求解/输出 ANSYS 有限元分析 后处理 General Postproc ANSYS 有限元分析 后处理 结点解与单元解 ANSYS 有限元分析 命令流 实例 ANSYS 静力 分析实例 悬臂梁 nCodeDL 高周疲劳 分析实例 悬臂梁 一、前言有限元分析的主要 目的 是检查结构或构件对一定荷载条件的响应。因此,在分析中,指定合适的荷载条件是关键的一步。在 ANSYS 程序中,可以用各种方式对模型施加荷载,而且可以借助荷载步选项,可以控制在求解中荷载如何使用。 为什么要加载/设置边界条件? 不加载,你闲的没事建模玩啊,不加载,你让求解器算啥? 算刚体模态啊! 因为,有限元模型所确定的偏微分方程组如若不指定边界条件,相当于没有给定定解条件,在数学上,只能求出带若干个积分常数的通解,通常情况下,通解不具有工程意义,因此,需要结合所分析问题,设定有限元模型的力的边界条件和位移边界条件,统称为设置边界条件,又可称为加载。(不要把加载理解的太狭隘,广义加载,广义加载,广义加载。) 所谓 加载 即为有限元模型设置边界条件,边界条件分为力的边界条件和位移边界条件。因此,我们通常所说的荷载实际上有更为广泛的含义,不仅仅是力,还可以是位移、速度、加速度、温度等等,即广义力。 一切能引起结构内力和变形的原因,都可视为荷载,它们被统称为 广义荷载/广义力。 在建立有限元模型之后,就可以根据结构在工程实际中的应用情况为其制定位移边界条件和载荷,并选择适当的求解器进行求解。在 ANSYS 中,载荷包括边界条件和外部作用力,即位移边界和力边界。 ANSYS 能够求解由有限元方法建立的联立方程,求解的结果包括:节点的自由度解,为基本解;原始解的导出解,为单元解。单元解通常是在单元的积分点上计算出来的。 施加载荷和求解过程是 ANSYS 有限元分析中的一个非常重要的组成部分,主要包括确定分析类型和分析选项、施加载荷到几何模型/有限元模型、确定载荷步选项、选择求解的方式和开始求解分析运算等内容。 二、结构分析Structural analysis is probably the most common application of the finite element method. The term structural (or structure) implies not only civil engineering structures such as bridges and buildings, but also naval, aeronautical, and mechanical structures such as ship hulls, aircraft bodies, and machine housings, as well as mechanical components such as pistons, machine parts, and tools. 注:严格上讲,英文段首不该缩进,但是没办法,强迫症,为了和中文看起来更协调,我缩进了,哈哈。 2.1 结构分析类型在 ANSYS 中,结构分析主要包括: 结构静力分析、模态分析、谐响应分析、瞬态动力学分析、谱分析、屈曲分析 和显示动力学分析。 You can perform the following types of structural analyses: Static Analysis、Modal Analysis 、Harmonic Analysis、Transient Dynamic Analysis 、Spectrum Analysis、Buckling Analysis 和 Explicit Dynamic Analysis. Several special-purpose structural analysis capabilities are available: Fracture mechanics, Composites, Beam analyses and cross sections. The primary unknowns (nodal degrees of freedom) calculated in a structural analysis are displacements. Other quantities such as strains, stresses, and reaction forces are then derived from the nodal displacements.
使用功能: Specifies the analysis type and restart status.。 使用格式: ANTYPE,Antype,Status,LDSTEP,SUBSTEP,Action,–,PRELP 。 参数说明: Antype 为分析类型,默认值为上一次指定的分析类型,若没有指定,则为结构静力分析。 Status 指定分析的状态,它有两个分析选项:NEW 指定一次新的分析 (默认设置) 和 REST 指定为前一次分析的重启动。 Analysis typeDescriptionSTATIC or 0Perform a static analysis.BUCKLE or 1Perform a buckling analysis. Implies that a previous static solution was performed with prestress effects calculated (PSTRES,ON).MODAL or 2Perform a modal analysis.HARMIC or 3Perform a harmonic analysis.TRANS or 4Perform a transient analysis.SUBSTR or 7Perform a substructure analysis.SPECTR or 8Perform a spectrum analysis. Implies that a previous modal analysis was performed.SOIL or 9Perform a soil analysis including geostatic stress equilibrium or consolidation. 2.2 阻尼定义
The ANSYS, Inc. family of products uses the h-method for solving structural problems. The h-method can be used for any type of analysis. 本文仅讨论结构分析中的各种加载求解问题。 三、基本概念有限元分析的主要目的是检查结构或构件对一定载荷条件的响应。给定荷载 (力或位移) 相当于给微分方程组以定解条件,由此便可确定积分常数。 3.1 荷载分类在 ANSYS 中,载荷包括所有边界条件以及外部或内部作用效应,可以施加在实体模型 (如关键点、线、面和体) 或有限元模型 (结点和单元) 上。 若是在实体模型上施加载荷,ANSYS 求解时会自动将这些载荷转换到相应的结点和单元上。如无特殊需求,荷载尽量施加在有限元模型上。 在 ANSYS 中,载荷包括边界条件和外部作用力。实际上,ANSYS 的功能就是分析有限元模型在不同外部作用力以及不同边界条件作用下的响应。对于不同分析类型,载荷可分为以下几种不同种类: 分析学科类型荷载的表现形式结构分析力、压力、重力、位移边界条件、热应力流体分析速度、压力热力分析—磁场分析—电场分析—用户可以根据要进行分析的内容,来重点掌握某类分析所对应的载荷,对其他分析类型的载荷及其加载方式只作简单了解即可。 为了真实地反映实际物理情况,从物理特性方面,ANSYS 的载荷分为 6 大类: 位移 (DOF) 约束、力 (集中载荷)、表面载荷、体积载荷、惯性力和耦合场载荷。 荷载类型说明示例自由度约束 DOF Constraint某些自由度为给定的已知值结构分析中指定结点位移或者对称边界条件等热分析中指定结点温度等集中荷载施加于模型结点上的集中载荷结构分析中的力和力矩热分析中热流率磁场分析中的电流表面荷载施加于某个表面的分布载荷结构分析中的压力热分析中的对流量和热通量体积荷载施加在体积上的荷载或者场载荷结构分析中的温度热分析中的内部热源密度磁场分析中的磁通量惯性荷载由物体惯性引起的载荷重力加速度引起的重力角速度引起的离心力主要在结构分析中使用耦合场荷载可以认为是以上载荷的一种特殊情况从一种分析得到的结果用作另一种分析的载荷。— 3.2 荷载步/子步/平衡迭代载荷步、子步和平衡迭代是控制加载求解过程的三个载荷时间历程节点。这些概念主要用于非线性分析或载荷随时间变化的问题。
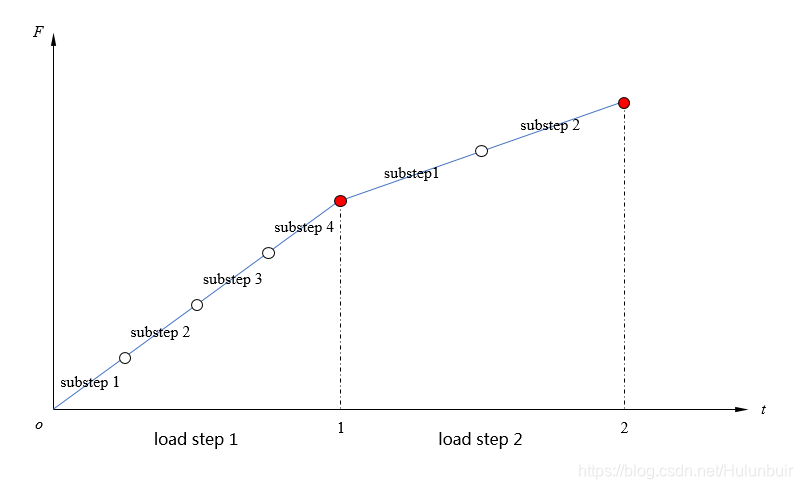
根据问题的特点,可以将加载过程分为若干个阶段进行,每一个阶段则作为一个载荷步。比如做弹塑性分析时,可以通过试算,初步估计开始屈服时的载荷,那么这个荷载可以作为第一个加载步,后续的载荷作为第二个加载步。 为了保证计算收敛和结果精度 (特别是在非线性分析时),往往把一个载荷步划分为若干个荷载子步,每个子步施加的载荷为该子步步长和整个载荷步长之比乘以该载荷步的载荷增量值。若子步数过多,计算时间会很长;若子步数太少,会导致计算不收敛。因此,软件要求用户根据问题的特点,设置最大和最小子步数,以平衡计算时间、收敛性和计算精度。当软件判断计算不收敛时,会减小计算步长 (增加子步数),若软件判断收敛精度足够时,会增大步长 (减小子步数),但均以用户设置为界限。
载荷步 (load step) 仅仅是为了获得解答的载荷配置。在线性静态或稳态分析中,可以对不同的载荷步施加不同的载荷组合;在瞬态分析中,多个载荷步会加到载荷历程曲线的不同区段。 A load step is a configuration of loads for which a solution is obtained. In a linear static or steady-state analysis, you can use different load steps to apply different sets of loads - wind load in the first load step, gravity load in the second load step, both loads and a different support condition in the third load step, and so on. In a transient analysis, multiple load steps apply different segments of the load history curve.
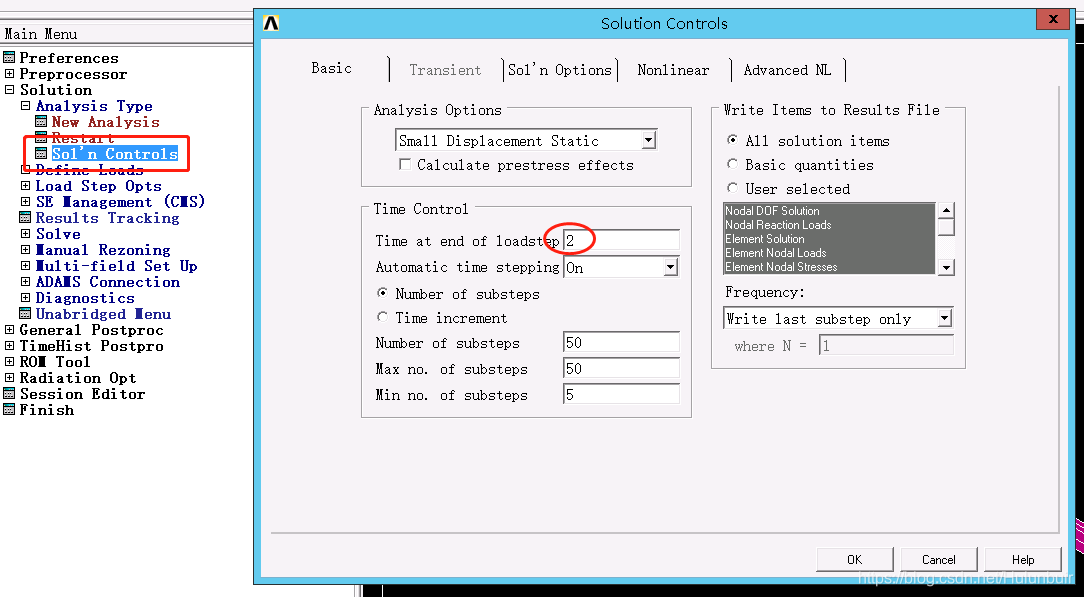
This figure shows a load history curve requiring three load steps: The first load step is for the ramped load, the second load step is for the constant portion of the load, and the third load step is for load removal. 一般荷载步只在两种分析中用到:静力分析和瞬态分析。在静力分析中,荷载步中可以包含子步。比如:一个载荷分为 1000 个荷载步来加载,其中每个荷载步都只有 1 个子步;另一种方式是 1 个荷载步,1000 个子步,相信第二种的计算时间要少很多。 根据问题的特点,可以将加载过程分为几个阶段进行,每一个阶段则作为一个载荷步。比如做弹塑性分析时,可以通过试算初步估计开始屈服时的载荷,作为第一步,后续载荷作为第二步等。 为了方便程序识别加载顺序,需要指定每个荷载步结束时的时间值,如设置第一个荷载步结束时的时间为 1 ,第二个荷载步结束时的时间为 2 ,以此类推。对于静力分析,时间是虚设的,时间的指定仅仅起计数作用。更多详见本文: 3.3 时间参数。 1. TIME 命令使用功能: 设置荷载步结束时的时间值/Sets the time for a load step. 使用格式: TIME,TIME 。 参数说明: TIME 为荷载步结束时的时间值,默认值为上一荷载步结束时的时间值+1.0。 2. GUI 操作
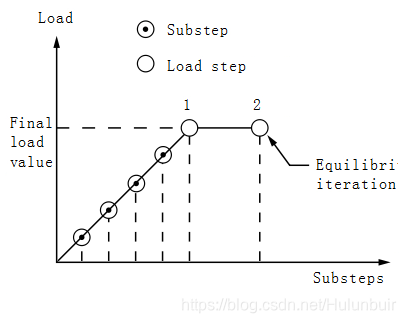
时间步长一般指单个子步的持时,可以为固定步长,也可为浮动步长。 子步 (substep) 也称为时间步 ,是载荷步中载荷逐渐施加到有限元模型上的过程中进行求解的点。子步为执行求解载荷步中的点,由于不同原因要使用子步。 子步对求解过程的控制非常重要,很多时候需要使用不同的子步数来满足不同的加载和求解需要: (1). 在非线性静态或稳态分析中,使用子步逐渐施加载荷以便能提高求解精确度,甚至使求解结果从不收敛转化为收敛。 (2). 在线性或非线性瞬态分析中,使用子步满足时间步长的需要,得到较为精确的解,即满足瞬态时间累积法则。 (3). 在谐响应分析中,使用子步获得谐响应频率范围内多个频率处的解。 Substeps are points within a load step at which solutions are calculated. You use them for different reasons: • In a nonlinear static or steady-state analysis, use substeps to apply the loads gradually so that an accurate solution can be obtained. • In a linear or nonlinear transient analysis, use substeps to satisfy transient time integration rules (which usually dictate a minimum integration time step for an accurate solution). • In a harmonic analysis, use substeps to obtain solutions at several frequencies within the harmonic frequency range. 1. NSUBST 命令使用功能: 指定荷载步中所需要的子步数. 使用格式: NSUBST,NSBSTP,NSBMX,NSBMN,Carry。 参数说明: 当时间步长为 固定 时间步长时,NSBSTP 为该荷载步所包含的荷载子步数目,另外 3 个参数无需设置。 当时间步长为 浮动/自动 时间步长时,NSBSTP 初始子步数,用于确定初始子步步长,即荷载步总时长除以该数值即为初始子步的步长,子步步长用于确定该子步所加荷载大小。NSBMX 为最大荷载步数,NSBMN 为最小荷载步数,程序以此为界自动搜索合适的荷载子步数。另外,NSBSTP 应不大于 NSBMX 。 2. GUI 操作
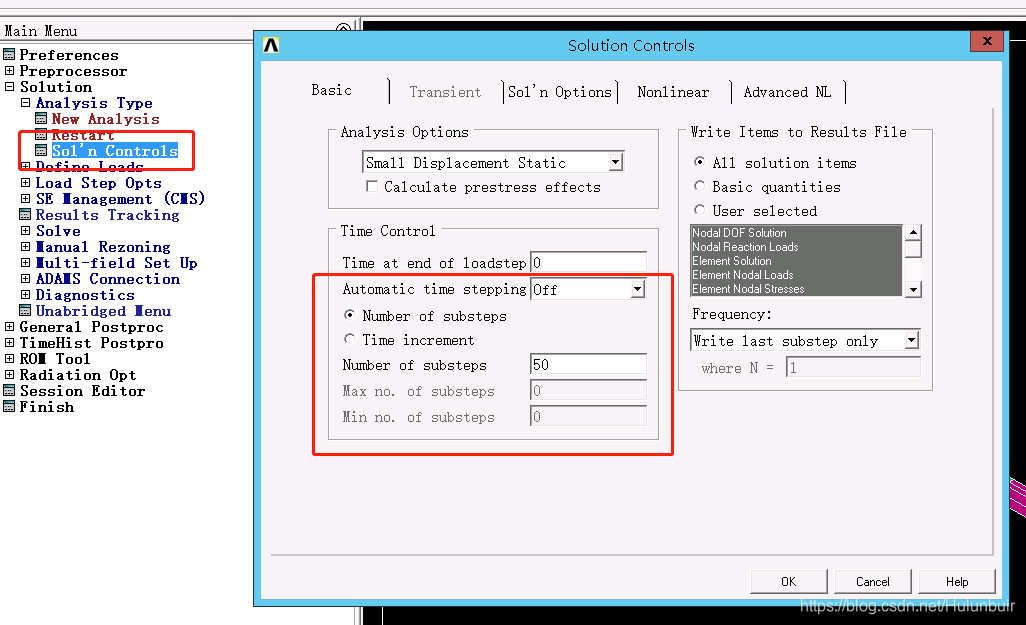
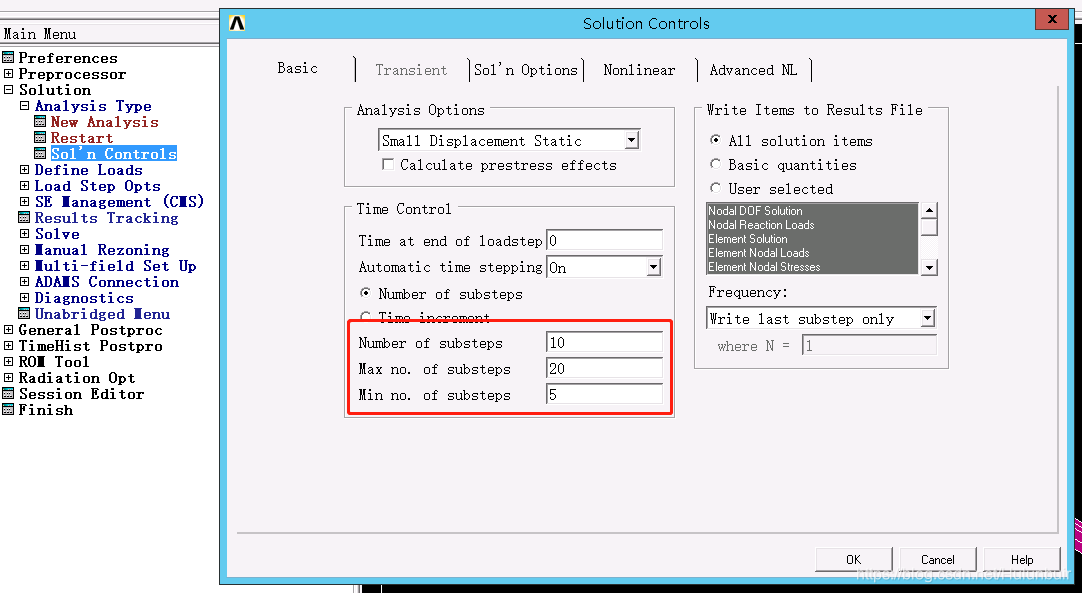
(1). 固定时间步长,荷载子步数设置为 50。若该荷载步所施加的荷载为 1000 N,那么该荷载步将被分成 50 个子步。若为坡道加载,则每一子步的荷载增量为 20 N,共计算 50次,例如,第一个荷载子步所施加的荷载值为 20 N,第二个荷载子步计算结束时,作用在结构/构件上的荷载数值为 40 N,以此类推。 /SOLU ! 访问求解器 AUTOTS,0 ! 固定时间步长 NSUBST,50 ! 荷载子步数设置为固定值50(2). 自动时间步长,初始子步数设置为 ,10,最大子步数为 20,最小子步数为 5。若该荷载步所施加的荷载为 1000 N,且该荷载步总时长为 1,那么初始子步步长为 1/10 = 0.1,初始子步上的加载量为 0.1*1000 = 100 N,其后的子步步长由程序自动确定 (因为你设置了自动时间步),但以设置为界,自动步长的最小值为 1/20 = 0.05 ,自动步长的最大值为 1/5 = 0.2,计算结束时荷载子步数大于等于 5 且小于等于 20 。 /SOLU ! 访问求解器 AUTOTS,1 ! 自动时间步长 NSUBST,10,20,5 ! 初始子步数20/最大子步数20/最小子步数5
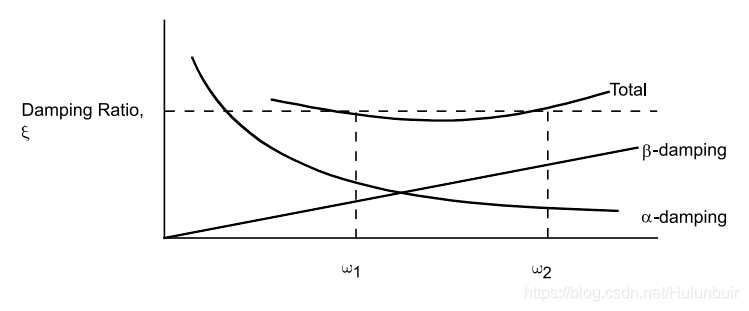
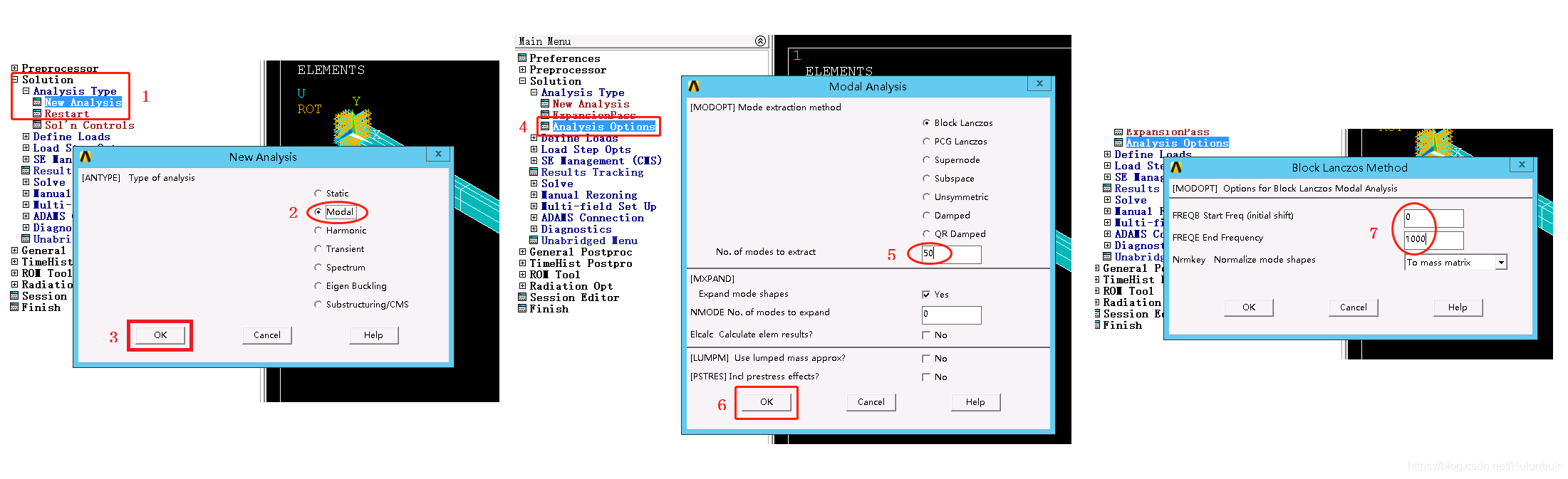
平衡迭代:在给定子步下,为了收敛而计算的附加解,仅用于非线性分析。 当子步的载荷施加到有限元模型上时,求解器开始求解子步载荷的结果。有限元的方法常使用迭代来求解,在迭代的过程中逐渐逼近子步载荷,使用迭代方程 (省略其他变量) 可以表示为: f ( L n , L n − 1 , L ) = 0 f(L_n, L_{n-1},L)=0 f(Ln,Ln−1,L)=0 式中,L 为子步载荷,Ln 为第 n 次迭代的结果,当满足: ∣ L − L n ∣ < L e r r |L-L_n|> Title-11. 模态分析步 * ! ********************************* ! *** Analysis Type - Modal. ! *** Mode-extraction Method: Block Lanczos. ! *** Equation Solver Type: SPAR. ! *** Frequency Range Beginning: 0 Hz. ! *** Frequency Range Ending: 1000 Hz. /SOLU ! 访问求解器模块 ANTYPE,MODAL ! 分析类型/模态分析 MODOPT,LANB,50 ! 模态分析方法/模态提取阶数 EQSLV,SPAR ! 求解方法/SPAR MXPAND,0,,,0 ! 默认设置 LUMPM,0 ! 默认设置 PSTRES,0 ! 默认设置 MODOPT,LANB,50,0,1000,,OFF ! 模态阶数/起点频率/终点频率 定义模态分析步命令流 GUI 操作
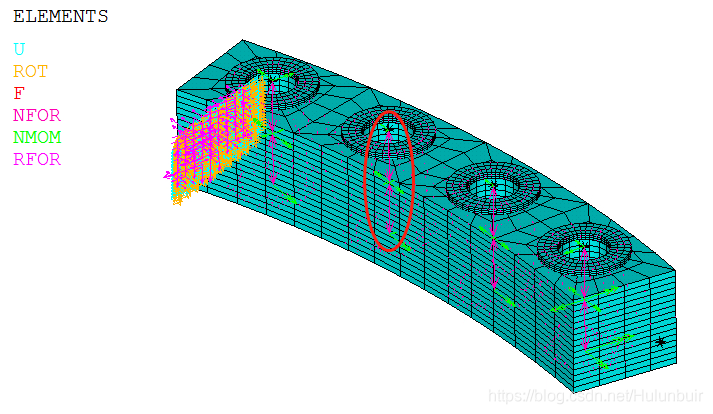
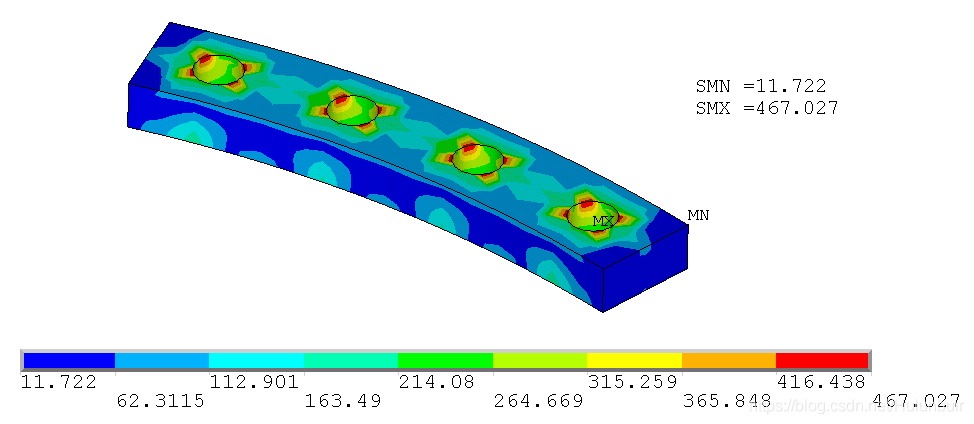
由 命令流 No.26 施加的螺栓预紧力,经计算分析后,如下图所示:
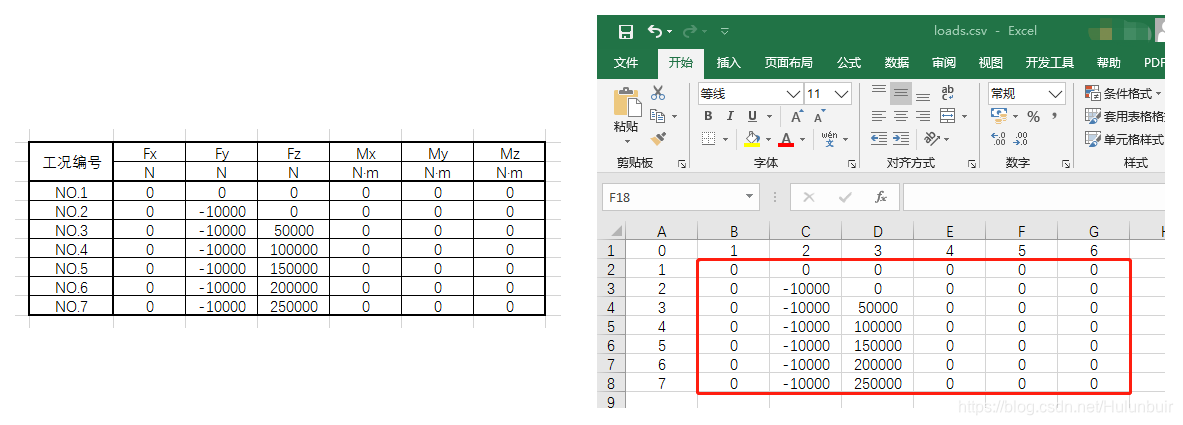
通常情况下,螺栓预紧工况仅仅是静力分析的初始荷载步,在此基础上,我们还需要分析其他荷载作用下,结构的受力情况。本部分以多工况循环分析为例,来说明 ANSYS 中,此种计算的实现。本部分共相互独立的在预紧工况的基础上分析如下 7 个工况:
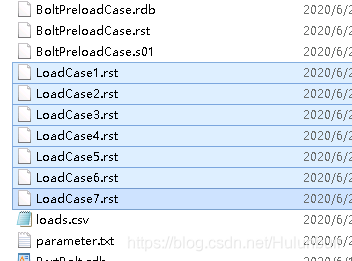
命令流 No.27 运行后,经求解计算,可得到 7 个 .rst 文件,分别为 LoadCase1.rst、LoadCase2.rst、… 、LoadCase7.rst。
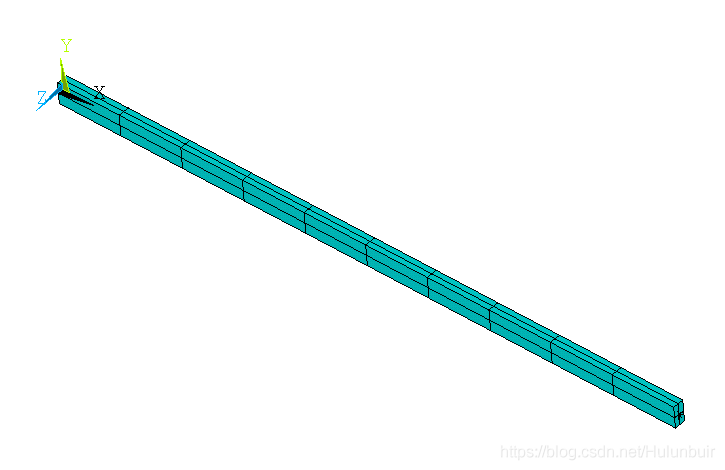
LoadCase1.rst 为螺栓预紧力及工况 1 中各外载共同作用下,结构的静力响应结果文件,其余 rst 文件类似于此。 本部分介绍的是单荷载步多工况分析,即每个加载工况生成一个 rst 文件。 更多 ANSYS 后处理操作详见博客: ANSYS 有限元分析 后处理 General Postproc 。 荷载步文件法本部分以博客 ANSYS 静力分析实例 悬臂梁 提到的悬臂梁为例,采用实体建模方式,在其端部分别施加 6 个分量的荷载,分别为 Fx = 100 N、Fy = 100 N、Fz = 100 N、Mx = 10000 N-mm、My = 10000 N-mm、Mz = 10000 N-mm,分别计算悬臂梁在这 6 个荷载单独作用下的应力分布等。 悬臂梁加载求解前的有限元模型可运行如下命令流创建: FINISH /CLEAR ! Units: mm, N L = 360 ! Length H = 12 ! Height B = 6 ! Width E = 200000 ! Young’s modulus nu = 0 ! Poisson’s ratio NumX = 10 ! Number of elements in x direction NumY = 2 ! Number of elements in y direction NumZ = 2 ! Number of elements in z direction /PREP7 BLOCK, 0, L, -H/2, H/2, -B/2, B/2 ! 创建六面体 /VIEW,, 1, 1, 1 ! 设置视图 VPLOT ! Plot Volumes ET, 1, SOLID186 ! 186减缩积分单元 KEYOPT,1,2,0 MP, EX, 1, E MP, NUXY, 1, nu TYPE, 1 ! 设置单元类型 MAT, 1 ALLSEL,ALL ! 全显示 LSEL,S,LENGTH,,H ! 按长度选线 LESIZE,ALL, , ,NumY, , , , ,0 ! 布种子 ALLSEL,ALL LSEL,S,LENGTH,,B ! 按长度选线 LESIZE,ALL, , ,NumZ, , , , ,0 ! 布种子 ALLSEL,ALL LSEL,S,LENGTH,,L ! 按长度选线 LESIZE,ALL, , ,NumX, , , , ,0 ! 布种子 ALLSEL,ALL VSWEEP,ALL ! 扫略分网 R,1 ! 定义新实常数 ET,2,TARGE170 ! 定义目标面单元 - 连续面 KEYOPT,2,2,1 ! Boundary conditions for rigid target nodes: Specified by user. ET,3,CONTA174 ! 定义接触面单元 - 离散面 KEYOPT,3,2,2 ! MPC KEYOPT,3,4,1 ! On nodal point - normal from contact surface KEYOPT,3,12,5 ! Behavior of contact surface: Bonded (always). N1 = NODE(L,0,0) ! 获取结点(L,0,0)的编号 NSEL,S,NODE, ,N1 ! 新建选择集,选择编号为N1结点。 CM,loadNode,Node ! 为加载点创建一组件 ALLSEL,ALL ! 全显示 REAL,1 ! 激活实常数 TYPE,2 ! 激活目标单元类型号 TSHAP,PILO E,N1 ! 创建目标单元 ALLSEL,ALL ! 退出选择集,显示全部。 REAL,1 ! 激活实常数 TYPE,3 ! 激活目标单元类型号 NSEL,S,LOC,X,L ! 选择梁端部截面上全部结点 ESURF ! 在存在已选单元的自由面上生成重叠单元,即创建接触单元。 ALLSEL,ALL ! 全显示 EPLOT FINISH ALLSEL,ALL ! 全选 select all entities CDWRITE,DB,'CantileverBeam','cdb' ! 当前模型另存为 myjob.cdb 文件。
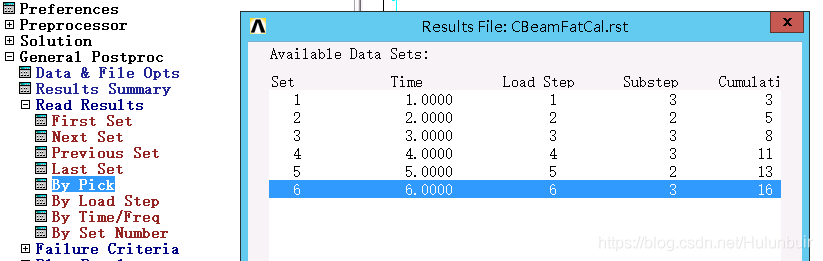
采用该方式提交求解计算后,最终只得到一个结果文件即 Jobname.rst,各分析工况为 rst 文件中不同的 Set,如下图所示。每个 Set 为一个工况下的计算结果,如 Set 1 为 Fx=100N 时计算得到的结果文件,Set 2 为 Fy=100N 时计算得到的结果文件,以此类推。每个 Set 间的计算结果没有继承/叠加关系,彼此相互独立。 若荷载累加方式设置为 FCUM,ADD ,则个 Set 间的计算结果则存在继承/叠加关系,若场输出设置为 OUTRES,ALL,ALL ,则每个 Set 为每个荷载步中的每个子步的计算结果。
以上,便是 ANSYS 有限元分析 加载与求解 部分的简单介绍。 因篇幅有限,部分功能未做介绍,如有疑问,欢迎邮件交流。 Email: [email protected] 。 本文仅用于个人学习,除此之外,无其他任何用途。 与此同时,也希望能够为 ANSYS 初学者多提供一点参考。 胸藏文墨怀若谷,腹有诗书气自华,希望各位都能在知识的 pāo 子里快乐徜徉。 因个人水平有限,文中难免有所疏漏/错误,不妥之处还请各位批评指正。 最后,祝各位攻城狮们,珍爱生命,保护发际线! 欢迎大家点赞、评论及转载,转载请注明出处! 为我打call,不如为我打款!
[01]. ANSYS 15.0 有限元分析完全自学手册. 郝勇 钟礼东 等编著. [02]. ANSYS 参数化编程与命令手册. 龚曙光 谢桂兰 黄云清 编著.添加链接描述 [03]. ANSYS Mechanical APDL Command Reference. Release 18.2. [04]. ANSYS Mechanical APDL Element Reference. Release 18.2. [05]. ANSYS Mechanical APDL Basic Analysis Guide. Release 18.2. [06]. ANSYS Mechanical APDL Structural Analysis Guide. Release 18.2. [07]. 第3章 施加载荷与求解过程. 刘伟/高维成/于广滨. [08]. Ansys中的载荷步和子步及其设置方法. 坐倚北风. [09]. ansys中载荷步、载荷子步、时间步三者的关系?. fyouyong. [10]. Ansys中的平衡迭代及其设置方法. 坐倚北风. [11].【ANSYS命令流】加载与求解技术(六):载荷步的设置选项命令. K.D.S v~. [12]. 有限元及 ANSYS > 第五讲 加载与求解. 任继文. [13]. Ansys多载荷步分析流程. [14]. ansys多载荷步的理解. [15]. ANSYS 入门教程 (32) - 分析类型与求解控制选项 (a) |




【本文地址】