现代控制理论基础丨状态空间分析法和状态结构图 |
您所在的位置:网站首页 › 状态空间描述 › 现代控制理论基础丨状态空间分析法和状态结构图 |
现代控制理论基础丨状态空间分析法和状态结构图
|
Author:AXYZdong 自动化专业 工科男 有一点思考,有一点想法,有一点理性! 定个小小目标,努力成为习惯!在最美的年华遇见更好的自己! 1.1 状态空间分析法 状态变量一组变量 → { 1 、足以完全确定系统运动状态 2 、个数又是最小 一组变量 \to \begin{cases} 1、足以完全确定系统运动状态 \\ 2、个数又是最小 \end{cases} 一组变量→{1、足以完全确定系统运动状态2、个数又是最小 性质: { 1 、 x t = t 0 2 、 t ≥ t 0 时刻的输入 I t → 完全确定在任何 t ≥ t 0 时刻的状态 x t 性质: \begin{cases} 1、x_{t=t_0} \\ 2、t \geq t_0 时刻的输入I_t \end{cases} \to完全确定在任何t \geq t_0 时刻的状态 x_t 性质:{1、xt=t02、t≥t0时刻的输入It→完全确定在任何t≥t0时刻的状态xt 类似于函数: x t = f ( x t 0 , I t ) x_t=f(x_{t_0},I_t) xt=f(xt0,It) 状态矢量 如果 n n n 个状态变量用 x 1 ( t ) , x 2 ( t ) , . . . , x n ( t ) x_1(t),x_2(t),...,x_n(t) x1(t),x2(t),...,xn(t) 表示,并把这些状态变量看作是矢量 x ( t ) x(t) x(t) 的分量,则称 x ( t ) x(t) x(t)为状态矢量,记作:x ( t ) = ( x 1 ( t ) x 2 ( t ) ⋮ x n ( t ) ) x(t)=\begin{pmatrix} x_1(t) \\ x_2(t)\\ \vdots \\ x_n(t) \\ \end{pmatrix} x(t)=⎝⎜⎜⎜⎜⎛x1(t)x2(t)⋮xn(t)⎠⎟⎟⎟⎟⎞ 状态空间 以状态变量用 x 1 ( t ) , x 2 ( t ) , . . . , x n ( t ) x_1(t),x_2(t),...,x_n(t) x1(t),x2(t),...,xn(t) 为坐标轴所构成的 n n n 维空间,称为状态空间。 状态方程 由系统的状态变量构成的一阶微分方程组称为系统的状态空间。例:以 R − L − C R-L-C R−L−C 电路说明如何用状态变量描述系统
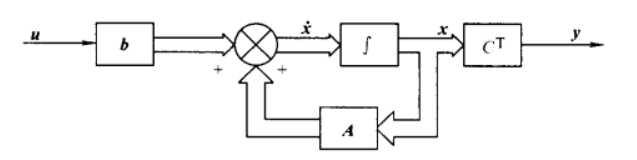
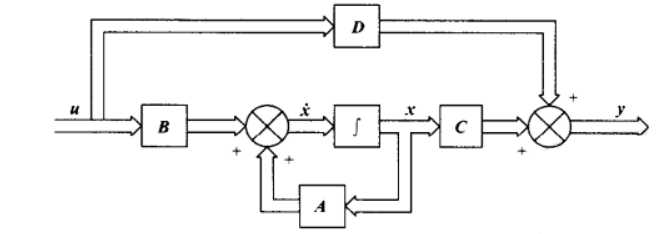
有一阶微分方程组: { C ⋅ d u c d t = i L ⋅ d i d t + R i + u c = u ⟹ { u ˊ c = 1 C ⋅ i i ˊ = − 1 L u c − R L i + 1 L u (1) 有一阶微分方程组: \begin{cases} C\cdot\frac{du_c}{dt}=i \\[2ex] L\cdot\frac{di}{dt}+Ri+u_c=u \end{cases} \implies \begin{cases} \acute{u}_c=\frac{1}{C}\cdot i \\[2ex] \acute{i}=-\frac{1}{L}u_c-\frac{R}{L}i+\frac{1}{L}u \end{cases} \tag1 有一阶微分方程组:⎩⎪⎨⎪⎧C⋅dtduc=iL⋅dtdi+Ri+uc=u⟹⎩⎪⎨⎪⎧uˊc=C1⋅iiˊ=−L1uc−LRi+L1u(1) 令 { x 1 = u c x 2 = i ⟹ ( x 1 ˊ x 2 ˊ ) = ( 0 1 C − 1 L − R L ) ( x 1 x 2 ) + ( 0 1 L ) u (2) 令 \begin{cases} x_1=u_c \\[2ex] x_2=i \end{cases} \implies \begin{pmatrix} \acute{x_1}\\[2ex] \acute{x_2}\\ \end{pmatrix} = \begin{pmatrix} 0 & \large\frac{1}{C}\\[2ex] \large-\frac{1}{L} & \large-\frac{R}{L}\\ \end{pmatrix} \begin{pmatrix} x_1\\[2ex] x_2\\ \end{pmatrix} + \begin{pmatrix} 0\\[2ex] \large\frac{1}{L}\\ \end{pmatrix}u \tag2 令⎩⎪⎨⎪⎧x1=ucx2=i⟹(x1ˊx2ˊ)=⎝ ⎛0−L1C1−LR⎠ ⎞(x1x2)+⎝ ⎛0L1⎠ ⎞u(2) 或: x ˊ = A x + b u 或 : \acute{x}=Ax+bu 或:xˊ=Ax+bu 其中: x ˊ = ( x 1 ˊ x 2 ˊ ) , A = ( 0 1 C − 1 L − R L ) , b = ( 0 1 L ) 其中:\acute{x}= \begin{pmatrix} \acute{x_1}\\[2ex] \acute{x_2}\\ \end{pmatrix}, A= \begin{pmatrix} 0 & \large\frac{1}{C}\\[2ex] \large-\frac{1}{L} & \large-\frac{R}{L}\\ \end{pmatrix}, b= \begin{pmatrix} 0\\[2ex] \large\frac{1}{L}\\ \end{pmatrix} 其中:xˊ=(x1ˊx2ˊ),A=⎝ ⎛0−L1C1−LR⎠ ⎞,b=⎝ ⎛0L1⎠ ⎞ 上述(1)和(2)式分别为图1中系统的 状态方程 和 状态方程的矩阵表达形式。 输出方程 在指定系统输出的情况下,该输出与状态变量间的函数关系式,称为系统的输出方程。 在例中系统中,若指定 x 1 = u c x_1=u_c x1=uc ,则输出方程 y = u c y=u_c y=uc或: y = x 1 (3) 或: y=x_1\tag3 或:y=x1(3) 矩阵表示形式: y = ( 1 , 0 ) ( x 1 x 2 ) (4) y= \begin{pmatrix} 1,0 \end{pmatrix} \begin{pmatrix} x_1\\ x_2 \end{pmatrix}\tag4 y=(1,0)(x1x2)(4) 状态空间表达式 状态方程和输出方程总合起来,构成对一个系统完整的动态描述称为系统的状态空间表达式。 如式(1)和式(3)所示,而式(2)和式(4)就是图1系统的状态空间表达式。 单输入——单输出定常系统,矢量矩阵表示时的状态空间表达式为:x ˊ = A x + b u y = c x (5) \acute{x}=Ax+bu\\ y=cx \tag5 xˊ=Ax+buy=cx(5) 式中, x = ( x 1 x 2 ⋮ x n ) 为 n 维状态矢量; A = ( a 11 a 12 ⋯ a 1 n a 21 a 22 ⋯ a 2 n ⋮ ⋮ ⋱ ⋮ a n 1 a n 2 ⋯ a n n ) 为系统内部状态的联系,称为系统矩阵 , 为 n × n 方阵; b = ( b 1 b 2 ⋮ b n ) 为输入对状态的作用,称为输入矩阵或控制矩阵,这里为 n × 1 的列阵; c = ( c 1 , c 2 , . . . , c n ) 为输出矩阵,这里为 1 × n 的行阵。 x=\begin{pmatrix} x_1 \\ x_2\\ \vdots \\ x_n \\ \end{pmatrix} 为 n 维状态矢量;\\[3ex] A=\begin{pmatrix} a_{11} & a_{12} & \cdots & a_{1n} \\ a_{21} & a_{22} & \cdots & a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ a_{n1} & a_{n2} & \cdots & a_{nn} \\ \end{pmatrix}为系统内部状态的联系,称为系统矩阵,为n\times n方阵; \\[3ex] b=\begin{pmatrix} b_1 \\ b_2\\ \vdots \\ b_n \\ \end{pmatrix} 为输入对状态的作用,称为输入矩阵或控制矩阵,这里为n\times 1的列阵; \\[3ex] c=\begin{pmatrix} c_1 , c_2 ,...,c_n \\ \end{pmatrix} 为输出矩阵,这里为1\times n的行阵。 x=⎝⎜⎜⎜⎜⎛x1x2⋮xn⎠⎟⎟⎟⎟⎞为n维状态矢量;A=⎝⎜⎜⎜⎜⎛a11a21⋮an1a12a22⋮an2⋯⋯⋱⋯a1na2n⋮ann⎠⎟⎟⎟⎟⎞为系统内部状态的联系,称为系统矩阵,为n×n方阵;b=⎝⎜⎜⎜⎜⎛b1b2⋮bn⎠⎟⎟⎟⎟⎞为输入对状态的作用,称为输入矩阵或控制矩阵,这里为n×1的列阵;c=(c1,c2,...,cn)为输出矩阵,这里为1×n的行阵。 多输入——多输出定常系统,矢量矩阵表示时的状态空间表达式为:x ˊ = A x + B u y = C x + D u (6) \acute{x}=Ax+Bu\\ y=Cx+Du\tag6 xˊ=Ax+Buy=Cx+Du(6) 式中, x 和 A 同单输入系统,分别 n 维状态矢量和 n × n 系统矩阵 式中,x和 A同单输入系统,分别n维状态矢量和n\times n系统矩阵 式中,x和A同单输入系统,分别n维状态矢量和n×n系统矩阵 u = ( u 1 u 2 ⋮ u r ) 为 r 维输入矢量; y = ( y 1 y 2 ⋮ y m ) 为 m 维输出矢量; B = ( b 11 b 12 ⋯ b 1 r b 21 b 22 ⋯ b 2 r ⋮ ⋮ ⋱ ⋮ b n 1 b n 2 ⋯ b n r ) 为 n × r 输入矩阵; C = ( c 11 c 12 ⋯ c 1 n c 21 c 22 ⋯ c 2 n ⋮ ⋮ ⋱ ⋮ c m 1 c m 2 ⋯ c m n ) 为 m × n 输出矩阵; D = ( d 11 d 12 ⋯ d 1 r d 21 d 22 ⋯ d 2 r ⋮ ⋮ ⋱ ⋮ d m 1 d m 2 ⋯ d m r ) 为 m × r 直接传递矩阵。 为了简便,一般不考虑输入矢量的直接传递,即令 D = 0 u=\begin{pmatrix} u_1 \\ u_2\\ \vdots \\ u_r \\ \end{pmatrix} 为 r 维输入矢量; y=\begin{pmatrix} y_1 \\ y_2\\ \vdots \\ y_m \\ \end{pmatrix} 为 m 维输出矢量;\\[3ex] B=\begin{pmatrix} b_{11} & b_{12} & \cdots & b_{1r} \\ b_{21} & b_{22} & \cdots & b_{2r} \\ \vdots & \vdots & \ddots & \vdots \\ b_{n1} & b_{n2} & \cdots & b_{nr} \\ \end{pmatrix}为n\times r输入矩阵;\\[3ex] C=\begin{pmatrix} c_{11} & c_{12} & \cdots & c_{1n} \\ c_{21} & c_{22} & \cdots & c_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ c_{m1} & c_{m2} & \cdots & c_{mn} \\ \end{pmatrix}为m\times n输出矩阵; \\[3ex] D=\begin{pmatrix} d_{11} & d_{12} & \cdots & d_{1r} \\ d_{21} & d_{22} & \cdots & d_{2r} \\ \vdots & \vdots & \ddots & \vdots \\ d_{m1} & d_{m2} & \cdots & d_{mr} \\ \end{pmatrix}为m\times r直接传递矩阵。\\[2ex] 为了简便,一般不考虑输入矢量的直接传递,即令D=0 u=⎝⎜⎜⎜⎜⎛u1u2⋮ur⎠⎟⎟⎟⎟⎞为r维输入矢量;y=⎝⎜⎜⎜⎜⎛y1y2⋮ym⎠⎟⎟⎟⎟⎞为m维输出矢量;B=⎝⎜⎜⎜⎜⎛b11b21⋮bn1b12b22⋮bn2⋯⋯⋱⋯b1rb2r⋮bnr⎠⎟⎟⎟⎟⎞为n×r输入矩阵;C=⎝⎜⎜⎜⎜⎛c11c21⋮cm1c12c22⋮cm2⋯⋯⋱⋯c1nc2n⋮cmn⎠⎟⎟⎟⎟⎞为m×n输出矩阵;D=⎝⎜⎜⎜⎜⎛d11d21⋮dm1d12d22⋮dm2⋯⋯⋱⋯d1rd2r⋮dmr⎠⎟⎟⎟⎟⎞为m×r直接传递矩阵。为了简便,一般不考虑输入矢量的直接传递,即令D=0 状态空间表达式的系统框图
状态空间描述的结构图绘图步骤: 画出所有积分器;(积分器的个数等于状态变量的个数,每个积分器的输出表示相应的某个状态变量) 根据状态方程和输出方程,画出相应的加法器和比例器; 用箭头将这些器件按照一定的顺序连接起来。常用符号:
例:一阶标量微分方程: x ˊ = a x + b u \acute{x}=ax+bu xˊ=ax+bu
已知状态空间表达式 x 1 ˊ = x 2 x 2 ˊ = x 3 x 3 ˊ = − 6 x 1 − 3 x 2 − 2 x 3 + u y = x 1 + x 2 \acute{x_1}=x_2\\ \acute{x_2}=x_3\\ \acute{x_3}=-6x_1-3x_2-2x_3+u\\ y=x_1+x_2 x1ˊ=x2x2ˊ=x3x3ˊ=−6x1−3x2−2x3+uy=x1+x2 则系统的模拟结构图为:
本次的分享就到这里
好书不厌百回读,熟读自知其中意。将学习成为习惯,用知识改变命运,用博客见证成长,用行动证明努力。 如果我的博客对你有帮助、如果你喜欢我的博客内容,请 “点赞” “评论” “收藏” 一键三连哦! 听说 👉 点赞 👈 的人运气不会太差,每一天都会元气满满呦!^ _ ^ **码字不易,大家的支持就是我坚持下去的动力。点赞后不要忘了👉关注👈我哦! 如果以上内容有任何错误或者不准确的地方,欢迎在下面👇留个言。或者你有更好的想法,欢迎一起交流学习~~~ |





【本文地址】
今日新闻 |
推荐新闻 |