现代控制理论期末复习笔记(必考题型速成) |
您所在的位置:网站首页 › 特征方程三重根 › 现代控制理论期末复习笔记(必考题型速成) |
现代控制理论期末复习笔记(必考题型速成)
|
目录(未完待续)
前言
1.建立状态空间表达式
1.1基本内容
1.2一般方法
1.3练习题
2.微分方程求状态空间表达式
2.1基本内容
2.2方法1(不含u的导数项)
2.3方法3(含u的导数项)
3.化为标准型
3.1基本内容
3.2对角标准型
3.3若当标准型
4.自由运动方程的求法
5.受迫运动方程的求法
6.求传递函数
7.能控性的判断
8.化能控标准型
9.对偶系统与能观性
10.状态反馈
11.极点配置
12.稳定性分析前言 本文针对现代控制理论期末考试常见题型的流程与解法的速成,主要用于帮助通过期末考试,因此并未涉及太多原理内容。 笔者相对于看视频,更喜欢阅读各类文章和书籍来学习(因为觉得这样最省时间),因此尝试写一下,希望可以帮助到有跟我学习习惯相似的同学。 本文每个章节由部分理论、解法(以例题说明)、练习题,这三个部分组成,介于笔者水平有限,希望大家可以在评论区发表意见。下面直接开始题型归纳。 1.建立状态空间表达式1.1基本内容定义: 描述系统输入、输出和状态变量之间关系的方程组称为系统的状态空间表达式。 形如:  其中第一个式子为状态方程,第二个为输出方程,并且: A ——系统矩阵 B ——输入矩阵 C ——输出矩阵 D ——直接传输矩阵 这里需要注意的是X(t)上加一点表示求导。 其他具体概念和原理不在此处解释了,本文重点是解题的招式,不是内功,有兴趣了解的读者可以参阅这篇文章: 如何入门现代控制理论 - 知乎 (zhihu.com) 1.2一般方法(例题)1)选择系统的状态变量(一般有固定套路)。 2)根据基本规则列基本方程。 3)推导系统的状态方程和输出方程,即得状态空间表达式。 例1.2.1-如图,建立状态空间表达式。  1)选择系统的状态变量 选取i和uc作为状态变量 (套路:RLC电路一般就选电容电压Uc和电感电流i为状态变量) 令x1=uc,x2= i;(x1 x2为状态变量) 2)根据基本规则列基本方程。 显然u为总电压,它等于电阻电压+电感电压+电容电压,所以: u=u_{c}+iR+L \frac{di}{dt} i=C\frac{du_{c}}{dt} (注:Ldi/dt为电感电压公式,C*du/dt为电容电流公式) 3)推导系统的状态方程和输出方程,即得状态空间表达式。 显然: i=x_{2}=C\frac{du_{c}}{dt}=C*\dot{x_{1}} 即: \dot{x_{1}}=\frac{1}{C}x_{2} 由 u=u_{c}+iR+L \frac{di}{dt} 得:L \frac{di}{dt}=u-u_{c}-iR 即: \dot{x2}=\frac{1}{L}u-\frac{1}{L}uc-\frac{1}{L}Ri =\frac{1}{L}u-\frac{1}{L}uc-\frac{1}{L}Rx2 输出方程y(t)=uc=x1 写成矩阵(这步不会看这里:如何计算矩阵乘法? - 知乎 (zhihu.com)):  可以返回去看看状态空间表达式的定义格式对应一下1.3练习题 可以返回去看看状态空间表达式的定义格式对应一下1.3练习题1.3.1试建立电枢控制的直流电动机的状态空间表达式。  1)选电枢电流ia和电机的角速度w为状态变量。 x1=ia,x2=w 2)根据原始规律写方程 可参考:直流电动机的五个计算公式 - 知乎 (zhihu.com) 【电机学整理 2——直流电机01】 - 知乎 (zhihu.com)  式中,Eb为电动机反电动势;Md为电动机的驱动转矩。 式中,Eb为电动机反电动势;Md为电动机的驱动转矩。3)推导系统的状态方程和输出方程,即得状态空间表达式。 x1=ia,x2=w;x1导=dia/dt,x2导=dw/dt整理可得:  X1=ia,X2=w X1=ia,X2=w而输出方程y=w=x2 写成向量矩阵形式为: 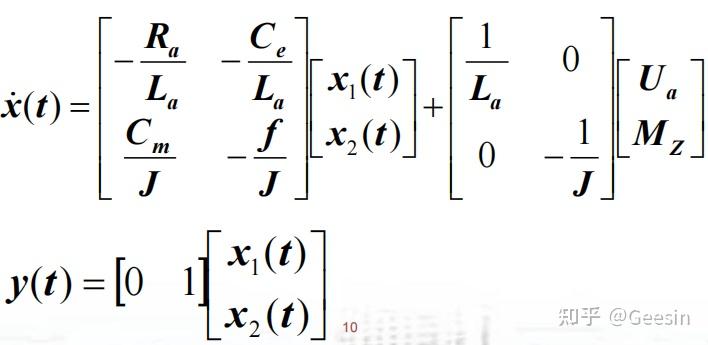 1.3.2尝试建立状态空间,对以下的机械位移系统。  1)选择系统的状态变量。  y(t)为位移 y(t)为位移2)根据基本规则列基本方程。 从牛顿第二定律,我们有:  位移的二重导数为加速度,一重导数为速度 位移的二重导数为加速度,一重导数为速度3)推导系统的状态方程和输出方程,即得状态空间表达式。  写成矩阵 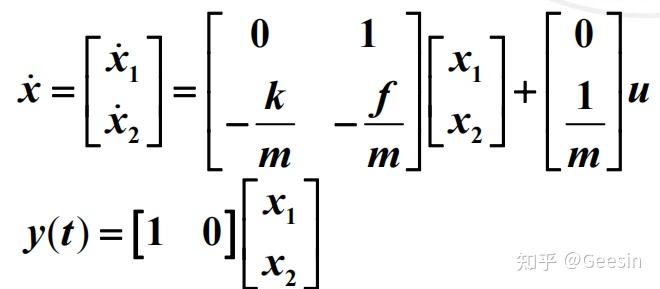 2.微分方程求状态空间表达式2.1基本内容 2.微分方程求状态空间表达式2.1基本内容主要可分为包含输入信号导数项,和不包含输入信号导数项两类。 即含 \dot{u} 和不含 \dot{u} 。 但方法都可分为3步: (1)标序号 (2)选择 n 个状态变量 (3)根据(1)的标号和(2)的阶数写成矩阵(套路) 2.2方法1(不含 \dot{u} )2.2.1例题-试求下列微分方程系统的状态空间表达式。  只有u,没有u导 只有u,没有u导(1)标序号: 1.对y标号:从y导y的最高导数项标号,分别从a0标到an,方程中y最高求了几次导就标到a几。 2.对u标号:从u导u的最高导数项标号,分别从b0标到bn,方程中u最高求了几次导就标到b几。  标序号的方法 标序号的方法即:  (2)选择 n 个状态变量: 选x1导,x2导,x3导.......(看y最高导了几次,最高导几次选几个)  在例题中,此处y最高导了3次,则最高要弄出x3的导数来,有: x1=y\\x2=\dot{x1}\\x3=\dot{x2}\\x4=\dot{x3}\\ (3)根据(1)的标号和(2)的阶数写成矩阵(套路)。  状态方程(注意负号,其中an和b0是上面标的系数) 状态方程(注意负号,其中an和b0是上面标的系数) 输出方程 输出方程于是例题的系统的状态空间表达式为:  2.3方法2(含 \dot{u} ) 2.3方法2(含 \dot{u} )例题-求下列微分方程的状态空间表达式  (1)标序号:  (2)选择 n 个状态变量: 含u导的情况下,一般选n 个状态变量为:  在例题中,即:  还缺个x4=什么,请读者尝试补充 还缺个x4=什么,请读者尝试补充其中:  即: \beta0=b3=0\\ \beta1=b2-a2\beta0=0\\ \beta2=b1-a1\beta0-a2\beta1=160-18*0-192*0=160\\ \beta3=b0-a0\beta0-a1\beta1-a2\beta2=640-180*160=-2240 (3)根据(1)的标号和(2)的结果写成矩阵(套路)。   当控制输入u的微分阶次小于输出y的阶次时,bn=0。 当控制输入u的微分阶次小于输出y的阶次时,bn=0。在本题中:  于是系统的状态空间表达式为3.化为标准型3.1基本内容 于是系统的状态空间表达式为3.化为标准型3.1基本内容所谓标准形是指:对角形、约当形(若当形,是一个意思只是翻译不同),关键是确定变换矩阵P。 一般算出特征值无重根,则化对角形,如特征值有重根,则化为若当形。 3.2对角标准型一般方法: (1)计算系统矩阵A的特征值和特征向量。 (2)套公式变换矩阵 下面结合例题来具体说明。  3.2.1例题 3.2.1例题(1)计算系统矩阵A的特征值和特征向量。 令行列式 det[\lambda I-A] =0 在例题中:  补充:我猜测有些读者获悉已经忘记线性代数如何计算了,在此我补充一点基本的知识: \lambda I的意思是,一个矩阵,从左上角到右下角的元素都是\lambda,而其余元素都是0的一个矩阵,所以\lambda I-A的意思,就是前面\lambda I这个矩阵减去后面的矩阵A。 二阶行列式计算:\begin{bmatrix} a & b\\c &d \end{bmatrix}=a*d-b*c 更多内容可以参考:怎么求特征值和特征向量?_哔哩哔哩_bilibili 因此我们可以得到:  上面的方程叫特征方程,解出来的值,叫特征值。 此时解得:\lambda1=1\\ \lambda2=2 接下来我们再求特征向量q1与q2: 明天再更 |
【本文地址】