DDPM扩散模型公式推理 |
您所在的位置:网站首页 › 物体反弹公式推导过程视频 › DDPM扩散模型公式推理 |
DDPM扩散模型公式推理
|
DDPM扩散模型公式推理----扩散和逆扩散过程
目录
DDPM扩散模型公式推理----扩散和逆扩散过程说明1.Diffusion model的直观理解2.数学解析Diffusion Model2.1 Diffusion 前向过程(扩散过程)2.1.1 重参数技巧(reparameterization trick)2.1.2 任意时刻的
x
t
x_t
xt 可以由
x
0
x_0
x0 和
β
t
\beta_{t}
βt 直接表示2.1.3 技巧3:
α
t
=
1
−
β
t
\alpha_t = 1-\beta_{t}
αt=1−βt
2.2 Diffusion 逆扩散过程
说明
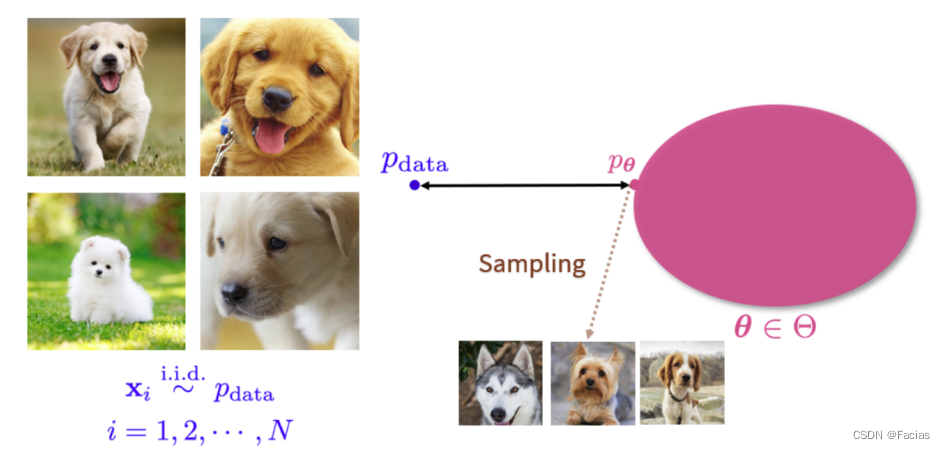
本文章旨在梳理DDPM这篇论文中的各个公式含义及推导,很多内容从其他博客处摘录,在文后列举。一篇文章发不全,拆开成两篇了。 1.Diffusion model的直观理解打个比方,就像是给你一块木头,让你把它雕刻成一个佛像,需要栩栩如生。Diffusion model在推理阶段就是在执行逆扩散过程,也就是雕刻佛像的过程。 用数学语言进行描述,生成式模型本质上是从一组概率分布中得到另一组概率分布。如下图所示,左边是一个训练数据集,里面所有的数据都是从某个数据
p
data
p_{\text {data }}
pdata 中独立同分布取出的随机样本。右边就是其生成式模型(概率分布),在这种概率分布中,找出一个分布
p
θ
p_ {\theta }
pθ使得它离
p
data
p_{\text {data }}
pdata 的距离最近。接着在
p
θ
p_ {\theta }
pθ上采新的样本,可以获得源源不断的新数据。 扩散过程 q q q,在 p data p_{\text {data }} pdata 上不断加噪声,使得他最终变成一个纯噪声分布 N ( 0 , I ) \mathcal{N}\left(0, I\right) N(0,I) 逆扩散过程 p p p,将噪声 N ( 0 , I ) \mathcal{N}\left(0, I\right) N(0,I)分布逐步地去噪以映射到 p data p_{\text {data }} pdata ,有了这样的映射,我们从噪声分布中采样,最终可以得到一张想要的图像,也就是可以做生成了。 而从单个图像样本来看这个过程,扩散过程
q
q
q就是不断往图像上加噪声直到图像变成一个纯噪声,逆扩散过程
p
p
p就是从纯噪声生成一张图像的过程。 给定真实图片样本 x 0 ∼ q ( x ) x_{0} \sim q(x) x0∼q(x),diffusion 前向过程通过 T T T次累计对其添加高斯噪声,得到 x 1 , x 2 , … , x T x_{1}, x_{2}, \ldots, x_{T} x1,x2,…,xT,如下图的 q q q过程。每一步的大小是由一系列的高斯分布方差的超参数 { β t ∈ ( 0 , 1 ) } t = 1 T \left\{\beta_{t} \in(0,1)\right\}_{t=1}^{T} {βt∈(0,1)}t=1T来控制的。 前向过程由于每个时刻 t t t只与 t − 1 t-1 t−1时刻有关,所以也可以看做马尔科夫过程: q ( x t ∣ x t − 1 ) = N ( x t ; 1 − β t x t − 1 , β t I ) , q ( x 1 : T ∣ x 0 ) = ∏ t = 1 T q ( x t ∣ x t − 1 ) q\left(x_{t} \mid x_{t-1}\right)=\mathcal{N}\left(x_{t} ; \sqrt{1-\beta_{t}} x_{t-1}, \beta_{t} \mathbf{I}\right), q\left(x_{1: T} \mid x_{0}\right)=\prod_{t=1}^{T} q\left(x_{t} \mid x_{t-1}\right) q(xt∣xt−1)=N(xt;1−βt xt−1,βtI),q(x1:T∣x0)=t=1∏Tq(xt∣xt−1) β t \beta_{t} βt为方差 1 − β t \sqrt{1-\beta_{t}} 1−βt 为均值,且之后要用到的 α t = 1 − β t \alpha_t = 1-\beta_{t} αt=1−βt,即 α t \alpha_t αt为均值的平方这个过程中,随着 t t t的增大, x t x_t xt越来越接近纯噪声。当 T → ∞ T \rightarrow \infty T→∞, x T x_T xT是完全的高斯噪声(下面会证明,且与均值系数 1 − β t \sqrt{1-\beta_{t}} 1−βt 的选择有关)。 将其中的第 t t t 步提取出来解析, x t x_t xt的分布为 q ( x t ∣ x t − 1 ) = N ( x t ; 1 − β t x t − 1 , β t I ) q\left(x_{t} \mid x_{t-1}\right)=\mathcal{N}\left(x_{t} ; \sqrt{1-\beta_{t}} x_{t-1}, \beta_{t} \mathbf{I}\right) q(xt∣xt−1)=N(xt;1−βt xt−1,βtI),而 x t − 1 x_{t-1} xt−1在该步中为已知,即已经被第 t − 1 t-1 t−1步求解出来了,所以 x t − 1 x_{t-1} xt−1 可以看作常数。所以 x t x_t xt 的均值为常数 1 − β t x t − 1 \sqrt{1-\beta_{t}} x_{t-1} 1−βt xt−1 ,方差为 β t \beta_{t} βt 2.1.1 重参数技巧(reparameterization trick)如果要从高斯分布 z ∼ N ( z ; μ θ , σ θ 2 I ) z \sim \mathcal{N}\left(z ; \mu_{\theta}, \sigma_{\theta}^{2} \mathbf{I}\right) z∼N(z;μθ,σθ2I) 采样一个 z z z ,我们可以写成: z = μ θ + σ θ ⊙ ϵ , ϵ ∼ N ( 0 , I ) z=\mu_{\theta}+\sigma_{\theta} \odot \epsilon, \epsilon \sim \mathcal{N}(0, \mathbf{I}) z=μθ+σθ⊙ϵ,ϵ∼N(0,I) 所以 q ( x t ∣ x t − 1 ) = N ( x t ; 1 − β t x t − 1 , β t I ) q\left(x_{t} \mid x_{t-1}\right)=\mathcal{N}\left(x_{t} ; \sqrt{1-\beta_{t}} x_{t-1}, \beta_{t} \mathbf{I}\right) q(xt∣xt−1)=N(xt;1−βt xt−1,βtI) 可以写作: x t = α t x t − 1 + 1 − α t ϵ t − 1 \mathbf{x}_{t}=\sqrt{\alpha_{t}} \mathbf{x}_{t-1}+\sqrt{1-\alpha_{t}} \boldsymbol{\epsilon}_{t-1} xt=αt xt−1+1−αt ϵt−1 其中 α t = 1 − β t \alpha_t = 1-\beta_{t} αt=1−βt , ϵ t − 1 ∼ N ( 0 , I ) \boldsymbol{\epsilon}_{t-1} \sim \mathcal{N}(0, \mathbf{I}) ϵt−1∼N(0,I) 2.1.2 任意时刻的 x t x_t xt 可以由 x 0 x_0 x0 和 β t \beta_{t} βt 直接表示在前向过程中,有一个性质非常棒,就是我们其实可以通过 x 0 x_0 x0 和 β t \beta_{t} βt 直接得到 x t x_t xt。 x t = α t x t − 1 + 1 − α t ϵ t − 1 = α t ( α t − 1 x t − 2 + 1 − α t − 1 ϵ t − 2 ) + 1 − α t ϵ t − 1 = α t [ α t − 1 ( α t − 2 x t − 3 + 1 − α t − 2 ϵ t − 3 ) + 1 − α t − 1 ϵ t − 2 ] + 1 − α t ϵ t − 1 = ⋯ = α t α t − 1 ⋯ α 1 x 0 + α t α t − 1 ⋯ α 2 1 − α 1 ϵ 0 + α t α t − 1 ⋯ α 3 1 − α 2 ϵ 1 + ⋯ + α t 1 − α t − 1 ϵ t − 2 + 1 − α t ϵ t − 1 \begin{array}{rlr} \mathbf{x}_{t} & =\sqrt{\alpha_{t}} \mathbf{x}_{t-1}+\sqrt{1-\alpha_{t}} \boldsymbol{\epsilon}_{t-1} \\ \\ & = \sqrt{\alpha_{t}} \left( \sqrt{ \alpha_{t-1}}\mathbf{x}_{t-2} + \sqrt{1-\alpha_{t-1}}\boldsymbol{\epsilon}_{t-2} \right) + \sqrt{ 1-\alpha_{t}} \boldsymbol{\epsilon}_{t-1}\\ \\ & = \sqrt{\alpha_{t}} \left[ \sqrt{ \alpha_{t-1}} \left( \sqrt{ \alpha_{t-2}}\mathbf{x}_{t-3} + \sqrt{1-\alpha_{t-2}}\boldsymbol{\epsilon}_{t-3} \right) + \sqrt{1-\alpha_{t-1}}\boldsymbol{\epsilon}_{t-2} \right] \\ \\ &+ \sqrt{ 1-\alpha_{t}} \boldsymbol{\epsilon}_{t-1}\\ \\ &= \cdots\\ \\ &= \sqrt{\alpha_{t}} \sqrt{\alpha_{t-1}} \cdots \sqrt{\alpha_{1}} x_0 + \sqrt{\alpha_{t}} \sqrt{\alpha_{t-1}} \cdots \sqrt{\alpha_{2}}\sqrt{1-\alpha_{1}} \boldsymbol{\epsilon}_{0} \\ \\ &+ \sqrt{\alpha_{t}} \sqrt{\alpha_{t-1}} \cdots \sqrt{\alpha_{3}}\sqrt{1-\alpha_{2}} \boldsymbol{\epsilon}_{1} + \cdots + \sqrt{\alpha_{t}} \sqrt{1-\alpha_{t-1}} \boldsymbol{\epsilon}_{t-2} \\ \\ &+ \sqrt{1-\alpha_{t}} \boldsymbol{\epsilon}_{t-1}\\ \end{array} xt=αt xt−1+1−αt ϵt−1=αt (αt−1 xt−2+1−αt−1 ϵt−2)+1−αt ϵt−1=αt [αt−1 (αt−2 xt−3+1−αt−2 ϵt−3)+1−αt−1 ϵt−2]+1−αt ϵt−1=⋯=αt αt−1 ⋯α1 x0+αt αt−1 ⋯α2 1−α1 ϵ0+αt αt−1 ⋯α3 1−α2 ϵ1+⋯+αt 1−αt−1 ϵt−2+1−αt ϵt−1 其中, ϵ 0 ⋯ ϵ t − 1 \boldsymbol{\epsilon}_{0} \cdots \boldsymbol{\epsilon}_{t-1} ϵ0⋯ϵt−1 都为标准正态分布,服从 N ( 0 , I ) \mathcal{N}(0, \mathbf{I}) N(0,I)。正态分布有两个性质: c ϵ c \boldsymbol{\epsilon} cϵ也为正态分布,且 c ϵ ∼ N ( 0 , c 2 I ) c \boldsymbol{\epsilon} \sim \mathcal{N}(0, \mathbf{c^2I}) cϵ∼N(0,c2I), c c c 为常数可加性,即 N ( 0 , σ 1 2 I ) + N ( 0 , σ 2 2 I ) ∼ N ( 0 , ( σ 1 2 + σ 2 2 ) I ) \mathcal{N}\left(0, \sigma_{1}^{2} \mathbf{I}\right)+\mathcal{N}\left(0, \sigma_{2}^{2} \mathbf{I}\right) \sim \mathcal{N}\left(0,\left(\sigma_{1}^{2}+\sigma_{2}^{2}\right) \mathbf{I}\right) N(0,σ12I)+N(0,σ22I)∼N(0,(σ12+σ22)I)所以上式中, α t α t − 1 ⋯ α 2 1 − α 1 ϵ 0 \sqrt{\alpha_{t}} \sqrt{\alpha_{t-1}} \cdots \sqrt{\alpha_{2}}\sqrt{1-\alpha_{1}} \boldsymbol{\epsilon}_{0} αt αt−1 ⋯α2 1−α1 ϵ0服从正态分布,均值为0,方差为 α t α t − 1 ⋯ α 2 ( 1 − α 1 ) \alpha_{t} \alpha_{t-1} \cdots \alpha_{2} (1- \alpha_{1}) αtαt−1⋯α2(1−α1),再由可加性,上式方差为: α t α t − 1 ⋯ α 1 + α t α t − 1 ⋯ α 2 ( 1 − α 1 ) + α t α t − 1 ⋯ α 3 ( 1 − α 2 ) + ⋯ ⋯ + α t ( 1 − α t − 1 ) + ( 1 − α t ) ϵ t − 1 = α t [ α t − 1 ⋯ α 2 ( 1 − α 1 ) + α t − 1 ⋯ α 3 ( 1 − α 2 ) + ⋯ ⋯ + ( 1 − α t − 1 ) − 1 ] + 1 = α t [ α t − 1 ⋯ α 2 ( 1 − α 1 ) + α t − 1 ⋯ α 3 ( 1 − α 2 ) + ⋯ ⋯ + α t − 1 ( 1 − α t − 2 ) − α t − 1 ] + 1 = α t α t − 1 [ α t − 2 ⋯ α 2 ( 1 − α 1 ) + α t − 2 ⋯ α 3 ( 1 − α 2 ) + ⋯ ⋯ + α t − 2 ( 1 − α t − 3 ) − α t − 2 ] + 1 = α t α t − 1 ⋯ α 3 [ α 2 ( 1 − α 1 ) + ( 1 − α 2 ) − 1 ] + 1 = 1 − α t α t − 1 ⋯ α 3 α 2 α 1 = 1 − α ˉ t \begin{array}{rlr} &\alpha_{t} \alpha_{t-1} \cdots \alpha_{1} + \alpha_{t} \alpha_{t-1} \cdots \alpha_{2} (1-\alpha_{1})+ \alpha_{t} \alpha_{t-1} \cdots \alpha_{3} (1-\alpha_{2}) + \cdots\cdots + \alpha_{t} (1-\alpha_{t-1}) \\ \\ &+ (1-\alpha_{t}) \boldsymbol{\epsilon}_{t-1} \\ \\ &= \alpha_{t} \left[\alpha_{t-1} \cdots \alpha_{2}(1-\alpha_1) + \alpha_{t-1} \cdots \alpha_{3}(1-\alpha_2) + \cdots\cdots + (1 - \alpha_{t-1}) - 1\right] + 1\\ \\ & = \alpha_{t} \left[\alpha_{t-1} \cdots \alpha_{2}(1-\alpha_1) + \alpha_{t-1} \cdots \alpha_{3}(1-\alpha_2) + \cdots\cdots+ \alpha_{t-1} (1-\alpha_{t-2}) - \alpha_{t-1} \right] + 1\\ \\ & = \alpha_{t}\alpha_{t-1} \left[\alpha_{t-2} \cdots \alpha_{2}(1-\alpha_1) + \alpha_{t-2} \cdots \alpha_{3}(1-\alpha_2) + \cdots\cdots+ \alpha_{t-2} (1-\alpha_{t-3}) - \alpha_{t-2} \right] + 1\\ \\ & = \alpha_{t}\alpha_{t-1} \cdots \alpha_{3} \left[ \alpha_{2} \left( 1 - \alpha_1 \right) + (1 - \alpha_2) - 1 \right] + 1\\ \\ &= 1- \alpha_{t}\alpha_{t-1} \cdots \alpha_{3}\alpha_{2}\alpha_{1} \\ \\ &= 1- \bar{\alpha}_{t} \end{array} αtαt−1⋯α1+αtαt−1⋯α2(1−α1)+αtαt−1⋯α3(1−α2)+⋯⋯+αt(1−αt−1)+(1−αt)ϵt−1=αt[αt−1⋯α2(1−α1)+αt−1⋯α3(1−α2)+⋯⋯+(1−αt−1)−1]+1=αt[αt−1⋯α2(1−α1)+αt−1⋯α3(1−α2)+⋯⋯+αt−1(1−αt−2)−αt−1]+1=αtαt−1[αt−2⋯α2(1−α1)+αt−2⋯α3(1−α2)+⋯⋯+αt−2(1−αt−3)−αt−2]+1=αtαt−1⋯α3[α2(1−α1)+(1−α2)−1]+1=1−αtαt−1⋯α3α2α1=1−αˉt 其中, α ˉ t = α t α t − 1 ⋯ α 3 α 2 α 1 \bar{\alpha}_{t} = \alpha_{t}\alpha_{t-1} \cdots \alpha_{3}\alpha_{2}\alpha_{1} αˉt=αtαt−1⋯α3α2α1,所以: x t = α t x t − 1 + 1 − α t ϵ t − 1 = α ˉ t x 0 + 1 − α ˉ t ϵ \begin{array}{rlr} \mathbf{x}_{t} & =\sqrt{\alpha_{t}} \mathbf{x}_{t-1}+\sqrt{1-\alpha_{t}} \boldsymbol{\epsilon}_{t-1} \\ \\ & = \sqrt{\bar{\alpha}_{t}} \mathbf{x}_{0}+\sqrt{1-\bar{\alpha}_{t}} \boldsymbol{\epsilon} \end{array} xt=αt xt−1+1−αt ϵt−1=αˉt x0+1−αˉt ϵ 因此任意时刻的 x t x_t xt 满足: q ( x t ∣ x 0 ) = N ( x t ; α ˉ t x 0 , ( 1 − α ˉ t ) I ) q\left(\mathbf{x}_{t} \mid \mathbf{x}_{0}\right)=\mathcal{N}\left(\mathbf{x}_{t} ; \sqrt{\bar{\alpha}_{t}} \mathbf{x}_{0},\left(1-\bar{\alpha}_{t}\right) \mathbf{I}\right) q(xt∣x0)=N(xt;αˉt x0,(1−αˉt)I) 2.1.3 技巧3: α t = 1 − β t \alpha_t = 1-\beta_{t} αt=1−βt之所以要令 α t = 1 − β t \alpha_t = 1-\beta_{t} αt=1−βt,是因为只有这样才能推导出2.1.2中的结果。在原论文中, T T T 设为1000,即要进行1000次扩散加噪过程,每次扩散过程的参数关系为: β 1 < β 2 < … < β T \beta_{1} |
 Diffusion model由
p
data
p_{\text {data }}
pdata 得到
p
θ
p_ {\theta }
pθ的过程分为两个阶段:
Diffusion model由
p
data
p_{\text {data }}
pdata 得到
p
θ
p_ {\theta }
pθ的过程分为两个阶段: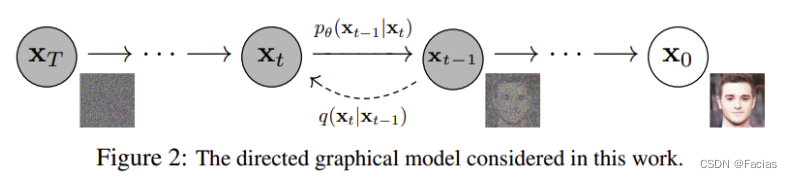
【本文地址】
今日新闻 |
推荐新闻 |