激光干涉仪的一种快速精准校光方法 |
您所在的位置:网站首页 › 激光干涉仪调整方法 › 激光干涉仪的一种快速精准校光方法 |
激光干涉仪的一种快速精准校光方法
|
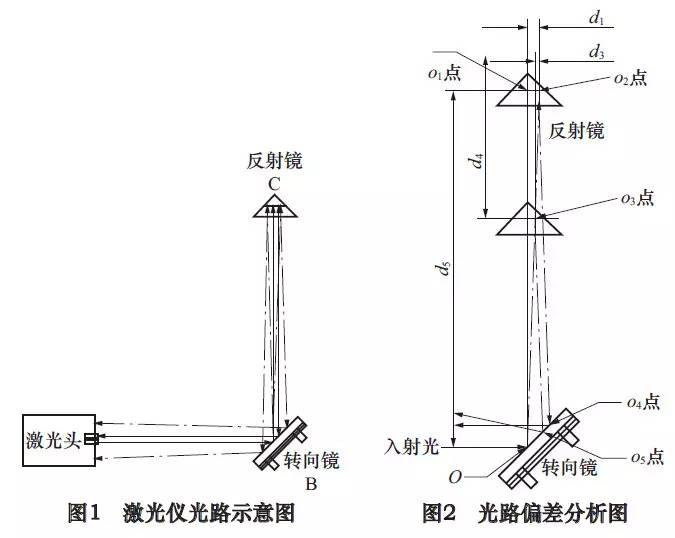
随着高精度数控机床行业的快速发展,激光干涉仪在机床行业的使用越来越广泛,然而其在使用过程中对激光光路的准直调整却一直是困扰广大激光干涉仪用户的一大问题,因为激光干涉仪在使用过程中光路准直调整占用了很大一部分时间。目前大多数生产企业的激光干涉仪操作人员的校准方法都是凭经验,来回反复调整,也有人提出“高处动尾部,低处动整体”的方法。其实后一种方法只是对前者的一种方法的经验总结,后一种方法是从整体上把握了调整的方向,可以让操作人员少走弯路,但并未提出一种定量的调整方法,所以在光路大体调整好后,还是靠经验感觉反复进行进一步精调,所以光路准直工作的效率还是亟待提高。本文以中图仪器激光干涉仪为例,针对此问题提出了一种快速精准校准光路的方法——等比例偏幅分析法。 1.激光校准原理 激光干涉仪是根据光学干涉基本原理设计而成的。具体到中图仪器激光干涉仪,即激光器射出单一频率波,当此光束抵达偏振分光镜时,会被分为两道光束(一道反射光束和一道投射光束),在这两道光射向其反光镜,然后透过分光镜反射回去,在激光头内的探测器形成一道干涉光束,若光程差没有任何变化,探测器会在每一次光程改变时,在相长性和相消性干涉的两极找到变动的信号。计算处理系统可以通过此变化来测量两光程间差异变化。 2.等比例偏幅调整法基本原理 以数控立式加工中心比较费时的Z轴光路校准为例,如图1,只有光路达到图1粗实线所示状态的时候激光干涉仪才能正常地进行工作,但实际使用的时候,我们在激光干涉仪安装的时候不可能一次安装到位,基本上光路都是会偏离要求位置,如图1中点划线所示。就此问题我们可以对图中点划线所示偏差光路进行分析。如图2,当反光镜在远端的时候,入射光经过O点反射,落在反射镜的O2点,当反射镜向下移动距离d4的时候,入射光落在反射镜上的O3点,那么在此过程中,入射光在反射镜上面落点的偏差减小了d3,通过图2所示的几何关系我们可得比例关系为 d3/d4=d1/d5 (1) 式中:d3就是偏幅变动量;d4就是反射镜的轴向移动距离,具体到数控机床即就是装有反射镜头的轴的移动距离;d1就是反射镜在远端的理论偏差量;d5就是反射镜在最远端距离转向镜的距离。
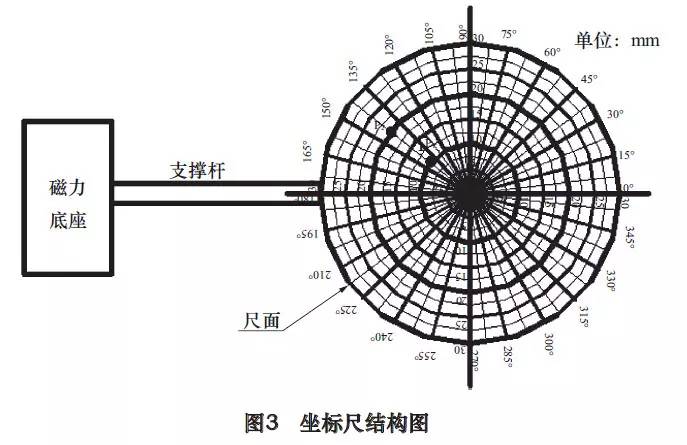
由图2分析可知,如果可以求得d1,那么经过转向镜的光路在反射镜面上的理论落点O1就可知道,也就可以根据偏差量d1调整光路落点,使之落在O1点。这就是等比例偏幅调整法的基本原理。 展开全文3.问题分析解决 3.1.d3的确定 由基本原理可知,d4的移动量可以通过机床坐标求得,d5可以通过卷尺测得,而由于反光镜面上一般是没有坐标尺的,所以d3无法直观F从反射镜面上取得。但我们可以制作一种辅助工具,我们称之为“对光坐标尺”,后面简称“坐标尺”,如图3所示。
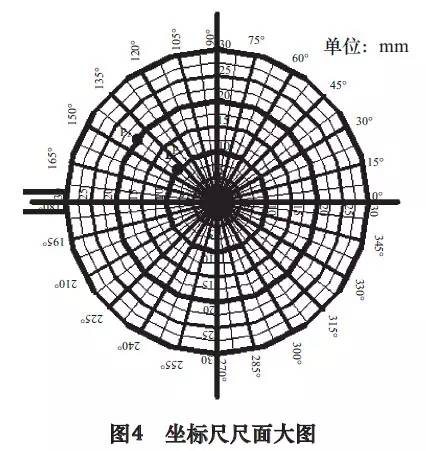
通过此坐标尺,当Z轴向下移动一定距离,光线落点(如图4中所示P1)坐标就可以从坐标尺上读出。例如P1点的坐标位置为(方向α=142.5°,幅度d3=10 mm),就可以求得d3的变化量。
3.2.理论坐标点P2的确定 在d3确定后,根据式(1)就可求得d1,也就可求得P2点的坐标(方向α,幅度d1),注意P2点的方向与P1的方向保持一致。 4操作方法 (1)光路粗调 用坐标尺替代反光镜,将坐标尺置于行程远端,用水平仪调平,粗调激光头和转向镜安装支架,使入射光经转向镜后落在坐标尺的范围内。 (2)测量偏差量d3 调整X、Y轴使光线落在坐标尺的中心位置,然后向下移动Z轴一定距离d4(移动距离以便于计算和便于坐标尺读数为原则),然后观察光线在坐标尺面上的落点,读取坐标位置。 (3)计算理论偏差量d1 根据式(1)可以求得坐标尺在原位置时的光线理论偏差量。 (4)光路精调 将Z轴返回原位置,根据计算出的d1,调整转向镜头背部调整螺钉,使光线落点沿原偏差方向移动d1距离,即达到理论落点,至此光路与Z轴已达到平行。 (5)安装反光镜 完成以上步骤后安装上反光镜,用水平仪调平,然后移动X、Y轴至激光点打在要求落点即可。 5结语 由以上分析可知,通过等比例偏幅调整方法,操作人员可以按照一定的规范和步骤快速、精确地一次性定量地将光路调整到位,避免工人根据个人感觉反复调整,极大地提高了工人的工作效率,降低对工人工作经验的要求,可以极大提高企业的生产效率。返回搜狐,查看更多 责任编辑: |
【本文地址】