“数智领航”系列|激光雷达测深技术带你探索水下神秘世界 – 北京数字绿土科技股份有限公司 |
您所在的位置:网站首页 › 潮间带水深 › “数智领航”系列|激光雷达测深技术带你探索水下神秘世界 – 北京数字绿土科技股份有限公司 |
“数智领航”系列|激光雷达测深技术带你探索水下神秘世界 – 北京数字绿土科技股份有限公司
|
传统设备价格(几万元不等)、重量轻、测深精度较高、测程远(可达上千米)、数据处理简单;缺点是剖面似测量,对水下地形的反映不是很精细。
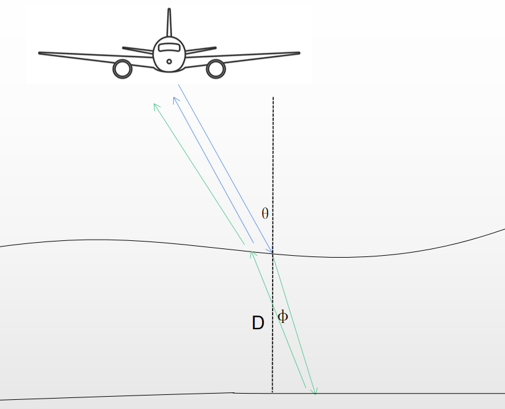
多波束一般挂载在船舶进行作业。 三、激光雷达测深技术 3.1激光测深原理 上文提到的传统测深技术都是基于声学的探测技术,而激光雷达测深技术则利用的是光学。为了能够达到发射激光就能测量的目的,通过科学家们的发现,波长在520~535nm范围的蓝绿激光(称作为海洋光学窗口)在海水中传播的能量衰减程度相对较低,在这个波长范围的光可以用作激光雷达水深测量。为了同时测量陆地地形,有些设备还配备了近红外激光(波长一般为1064nm)。 激光雷达测深的原理很复杂,可以简单的描述如下图所示:
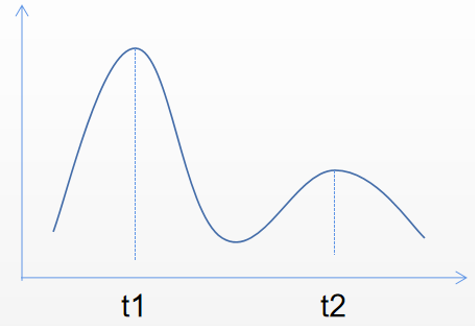
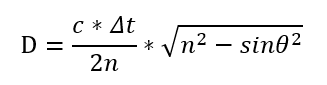
激光先到达水面时会反射一部分回波(蓝色所示),到达水下时又会反射回波(绿色所示),通过测量两次激光回波的时间差(t2-t1)=△t,乘速度得到传播的距离S。 假设激光入射角为θ,折射角为φ,海水折射率定义为n,海水深度为D。 那么可得到海水深度D:
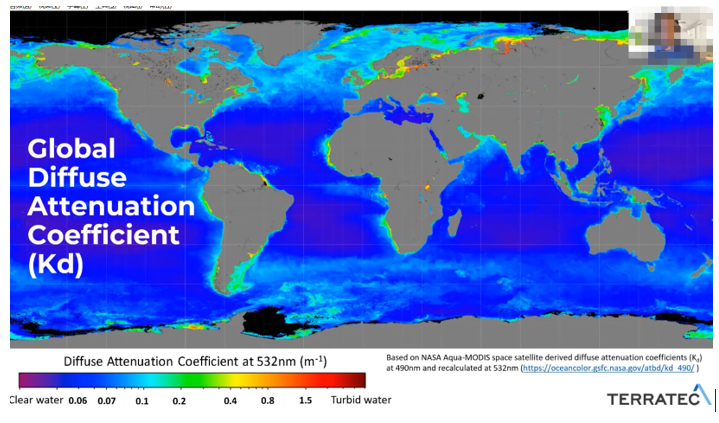
最后在水深测量时,还需要考虑海浪和潮汐影响因素。 3.2 激光水深的误差源 从上个公式以及考虑海浪和潮汐等影响来看,主要的误差有:回波时间测量误差、折射率误差、入射角测量误差、海浪测量误差、潮汐测量误差。回波时间测量误差:与激光雷达的全波形处理有关,并且由于海底情况复杂,比如:海底水质浑浊、海底情况复杂、海浪等的影响,会发生散射、折射、反射等现象,造成这个时间差无法很精确的确定,这是误差的主要来源。 折射率误差:折射率一般要求的是一个定值,但是海水不同深度的折射率不一样,因此需要精确的估算折射率。 入射角误差:与飞机的飞行姿态和扫描角有关,也需要精确的测定。 海浪与潮汐测量误差:所有水深测量都需要考虑的。 3.3 主流的测深设备 目前比较知名的有CZMIL SUPER NOVA、LEICA HawkEye 4X、RIEGL VQ-880GH、RIEGL VQ-840G、RIEGL BDF-1、FURGO LADS HD。 3.4 kd慢衰减系数和赛克盘深度 决定最大测深的参数:kd慢衰减系数和赛克盘深度。(1)慢衰减系数 kd慢衰减系数是海洋水色遥感和环境监测中的重要参数,简单理解是特定波长的光被水吸收的系数,越清澈的水,这个值越小,反之则越大,下图是全球的kd(532nm)的计算系数。
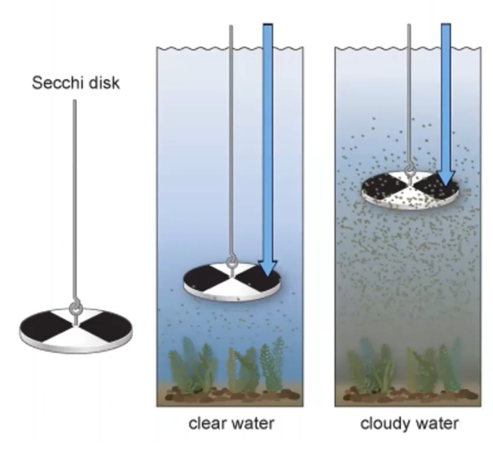
(2)赛克盘深度 赛克盘深度:采用具有黑白分割的直径大于30cm的靶标沉入到水中,直到肉眼无法分辨的距离。水越浑浊,分辨的距离就越小,反之则越大。
上述两个指标影响着最大测深,因此在作业前需要大致计算能够测得的最大深度。 3.5 激光测深的优点与缺点 激光测深最大的优点就是不同于传统的单波束和多波束测量需要驾驶船舶对水下地形进行测绘,激光测深可以使用有人机或者无人机进行,凭借着飞机的效率,势必会提高水下地形测绘的效率。根据多波束和机载激光雷达的价格来看,一般的激光测深的价格较昂贵。对于海洋测绘痛点区域的潮间带而言,机载激光雷达在退潮时进行测量,可以弥补数据空缺。因此价格合适的设备才能够是国内推广的关键之一。 注:相关图片素材来自互联网 |


【本文地址】