|
步进电机
步进电机基础知识
1、概述: 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 2、概念: 步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器原理: 3、结构 步进电动机构造:由转子(转子铁芯、永磁体、转轴、滚珠轴承),定子(绕组、定子铁芯),前后端盖等组成。最典型两相混合式步进电机的定子有8个大齿,40个小齿,转子有50个小齿;三相电机的定子有9个大齿,45个小齿,转子有50个小齿。  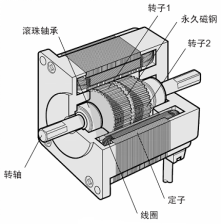 4、工作原理: 通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。每输入一个电脉冲,电动机转动一个角度前进一步。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。改变绕组通电的顺序,电机就会反转。所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。 5、分类 步进电机分三种:永磁式(PM) ,反应式(VR)和混合式(HB) 永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度 或15度; 反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰; 混合式步进是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度。这种步进电机的应用最为广泛。 现在比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。 5.1反应式步进电机 反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。 反应式步进电动机结构简单,生产成本低,步距角小;但动态性能差。 5.2混合式步进电机 混合式步进电动机综合了反应式、永磁式步进电动机两者的优点,它的步距角小,出力大,动态性能好,是目前性能最高的步进电动机。它有时也称作永磁感应子式步进电动机。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度。这种步进电机的应用最为广泛。 6、选择步进电机的步骤 选择电机一般应遵循以下步骤: 4、工作原理: 通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。每输入一个电脉冲,电动机转动一个角度前进一步。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。改变绕组通电的顺序,电机就会反转。所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。 5、分类 步进电机分三种:永磁式(PM) ,反应式(VR)和混合式(HB) 永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度 或15度; 反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰; 混合式步进是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度。这种步进电机的应用最为广泛。 现在比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。 5.1反应式步进电机 反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。 反应式步进电动机结构简单,生产成本低,步距角小;但动态性能差。 5.2混合式步进电机 混合式步进电动机综合了反应式、永磁式步进电动机两者的优点,它的步距角小,出力大,动态性能好,是目前性能最高的步进电动机。它有时也称作永磁感应子式步进电动机。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度。这种步进电机的应用最为广泛。 6、选择步进电机的步骤 选择电机一般应遵循以下步骤:
6.1确定负载转矩ML=G.r G:负载的质量 R:半径 6.2确定负载惯量JL&#
|