好课上新啦 |
您所在的位置:网站首页 › 深度相机标定方法视频讲解大全 › 好课上新啦 |
好课上新啦
|
本周即将迎来大家翘首期盼的中秋假期了! 也迎来了新课程了 《ROS激光相机联合标定》 新课程依旧有拼团优惠哦 和中秋假期加起来真是双重愉悦了~ 课程介绍激光相机的联合标定可以描述为:我们使用相机进行二维图像上的object detection,激光雷达可以辅助测距,从而帮助我们判断物体相对于相机坐标系的位置。 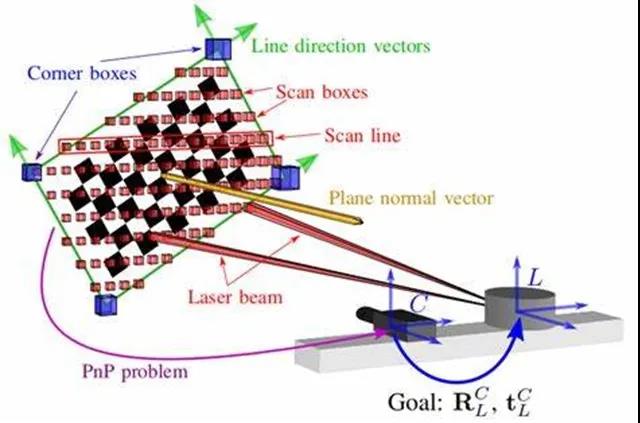
在ROS中实现3D目标检测功能是非常方便的,因为有现成的功能包可供开发者使用,例如PCL、ORK等等,可以快速实现三维空间下的点云特征提取、分割等功能。本课程将带你走进ROS的点云世界,了解PCL的基本原理,熟悉ROS中如何实现2D-3D的联合标定。 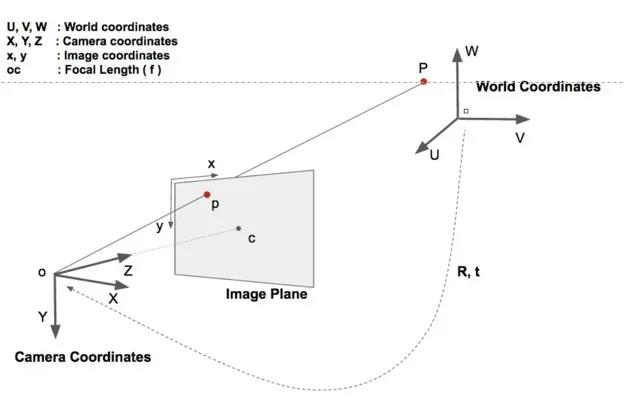
图1 
图2 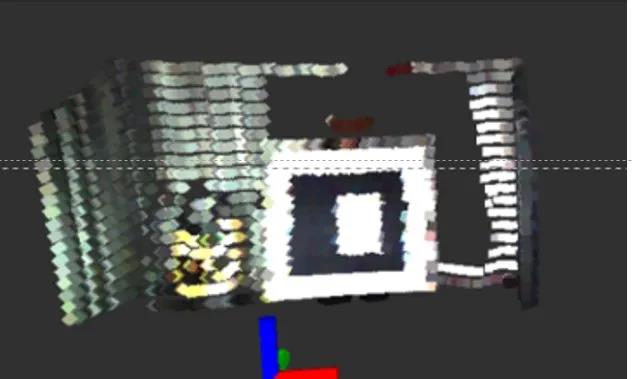
图3 通过这次课程你将学到: ① PCL如何对点云进行分割提取; ② 在ROS中如何使用PCL进行点云的相关操作以及点云中不同格式的转换和类型介绍; ③ ROS中如何实现动态调参,能够对点云进行粗分割; ④ 激光相机联合标定的过程和原理介绍。 课程内容1.PCL介绍 2.ROS中使用PCL 3.激光相机联合标定实例 4.课程小结与作业 适用人群说明1.本课程适用于对3D视觉有一定了解的人群,本课程也会涵盖RANSAC、PnP等算法的基础理论知识; 2.本课程的理论部分需要对矩阵论、线性代数有入门了解。 优惠好礼 拼团优惠
另外,古月居官网所获积分可以兑换优惠券哦!打开古月居官网-【我的主页】-【积分兑换】,点击兑换。 

兑换成功后在【兑换记录】查看兑换码,就可以在手机端使用了,不要错过省钱机会哟~ 
|

【本文地址】
今日新闻 |
推荐新闻 |