无人机着陆引导技术 |
您所在的位置:网站首页 › 沃尔玛退出中国的时间 › 无人机着陆引导技术 |
无人机着陆引导技术
|
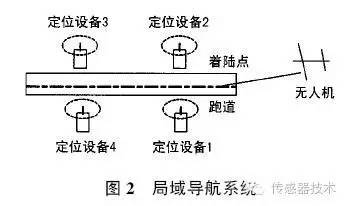
1.2 局域导航引导方案 图 2 为局域导航系统的示意图, 它独立于卫星导航系统, 能提供高精度的定位。局域导航系统的定位设备发送导航信号给无人机的局域导航接收机, 定位设备提供的导航信号为CDMA 信号, 包括各个定位设备的钟差和位置信息。定位设备之间的时间同步使用与导航信号分开的频率, 且采用频分多址FDMA 进行实时的时间同步校正。
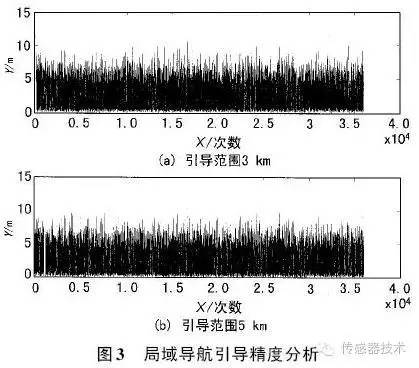
当定位设备之间的间距大于等于3 km, 测量精度小于1 m 时, 如图3 所示。 仿真结果表明, 无人机距离降落场5 km 以内时, 定位精度小于3 m( 71%) , 在10 km 以内时, 定位精度小于5 m( 60% ) 。可以满足无人机着陆引导的需求。 1.3 组合方案 差分卫星导航和局域导航的组合, 不仅能提高引导的精度, 更能提高着陆引导的可靠性和可用性。 除了DGPS 参考站、DGPS 接收机, 增加局域导航定位、局域导航接收机形成组合方案。其机载与地面的数据通信, 仍然采用无人机数据链, 可减少设备成本。 1.4差分卫星导航方案 正在运行的卫星导航系统有美国的GPS 系统和俄罗斯的GLONASS 系统; 正在建设的有欧洲的GALILEO 系统和 北斗二代系统。但差分卫星导航的原理是相同的, 以GPS 导航系统为例, 设计着陆引导的差分卫星导航方案。
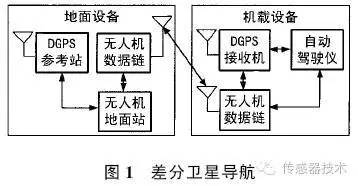
在图1中, 地面设备的DGPS 参考站位于已知的位置,DGPS 接收机为无人机上, 通过无人机数据链交换测控遥感与导航定位差分校正数据, 差分定位的结果分别送到自动驾驶仪和地面控制站。可根据要求采用自动驾驶仪或在地面站的无人机驾驶员完成无人机的起飞和着陆。 根据无人机的着陆引导要求, 可采用伪距差分和载波相位差分相结合的算法, 使无人机的定位精度达到5 m 以内的定位精度。 1.5 着陆引导 引导着陆设备实时( 20~ 50 次/ s) 计算着陆俯仰角和偏航角。对于DGPS, 无人机的大地坐标或大地直角坐标可通过无人机数据链传回地面控制站, 跑道着陆点的大地坐标或大地直角坐标可以事先得到。如果在着陆点建立站心坐标系, 则垂直向上为Z 轴, X 轴指向南, Y 轴指向东。取跑道中心线两端的大地坐标, 则可求出跑道在站心坐标系的方位角。对于局域导航来说, 定位设备的位置可以直接确定为站心坐标系的坐标, 省去大地坐标到站心坐标的转换。
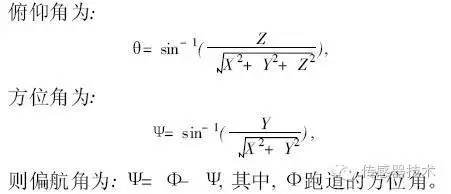
着陆引导的计算过程如下: 把无人机大地坐标转换为站心坐标, 根据跑道上一某点的站心坐标, 计算方位角和俯仰角, 跑道方位角与计算方位角的差, 即为偏航角; 计算出俯仰角, 与预定的角度比较, 给出无人机的下滑角度; 根据无人机离着陆点的距离、高度、偏航角和下滑角等, 实时控制或自动控制无人机的着陆。 为了正确地引导无人机着陆, 不仅要知道无人机相对于跑道的高度、距离、俯仰角和偏航角, 也要清楚无人机的航向角、俯仰角和倾斜角, 以及无人机的飞行速度等信息, 通过地面或机载的着陆引导程序, 自动引导无人机着陆。 2 着陆引导技术分析 传统的飞行器着陆引导, 有仪表着陆引导技术、微波着陆引导技术、二次雷达引导技术等, 仪表着陆引导精度较低, 微波着陆引导系统造价较高, 受技术体制的限制, 它们只能同时引导一架飞行器着陆。 二次雷达引导技术虽然能同时引导多架飞行器等待或着陆, 但其引导精度也不能达到自动着陆的要求( 3 m左右) 。相比差分卫星导航( DGPS) 和局域导航的组合引导技术, 则引导精度较高, 从仿真和实测数据表明可达3~ 5 m 的引导精度, 其引导数据频率也可达20 Hz 以上, 完全满足无人机自动着陆或控制着陆的要求。 由于差分卫星导航和局域导航的组合引导的信号是广播信号, 飞行器可以自行进行定位解算, 适合多架飞行器的等待或着陆引导。不仅适合单架无人机的着陆, 也适合于多架无人机的起飞/ 降落, 为未来的无人战斗机集群的作战提供了有力的保证。局域导航着陆引导技术, 需要的高精度时间同步技术和高精度测距技术, 是需要进一步研究的课题。 3 结束语 组合着陆引导技术, 可提高无人机系统的效能、减少起飞着陆事故的发生,可成为无人自动机场的基础技术。从国内外无人机着陆引导技术来看, 其涉及的技术领域很多, 包括无线电测量定位技术、卫星定位技术、雷达引导技术和视觉测量定位技术等。其应用范围包括固定翼无人机和无人直升机系统。因此, 对无人机着陆引导技术的研究和开发, 有着广泛的应用前景。 返回搜狐,查看更多 |
【本文地址】
今日新闻 |
推荐新闻 |