底盘│车辆横摆角速度(Yaw Rate)估算(上) |
您所在的位置:网站首页 › 汽车转弯半径一般是多少 › 底盘│车辆横摆角速度(Yaw Rate)估算(上) |
底盘│车辆横摆角速度(Yaw Rate)估算(上)
|
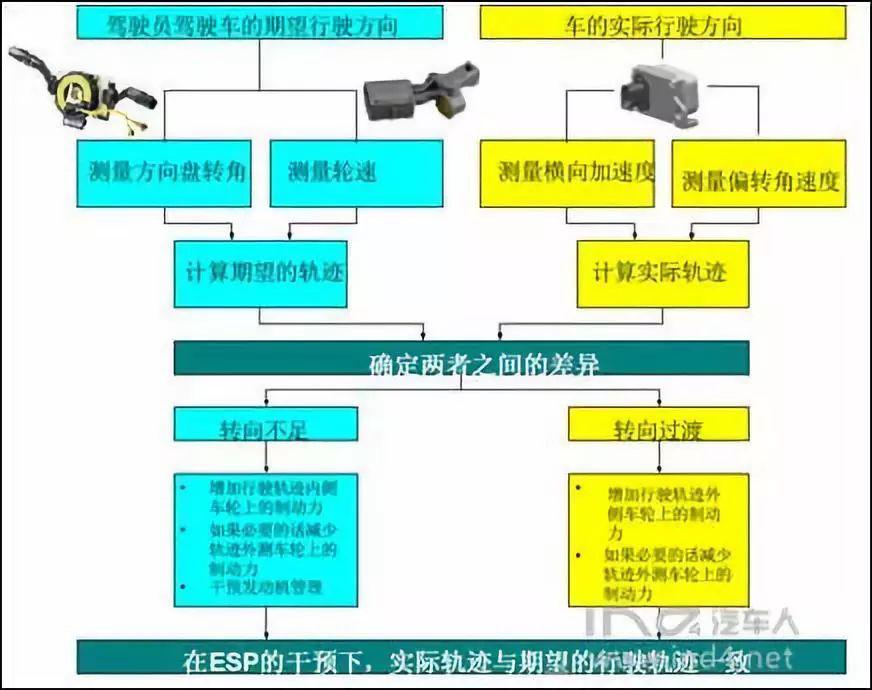
前言 如果单纯解释ESP 系统的工作逻辑,那很简单。ESP 系统接受来自方向盘转角传感器的角度信号,结合车速信号,算出该车在该车速、方向盘转角下应有的车身yaw值(中心转向)。将该Yaw值作为参考,与车身Yaw-G传感器检测出的车身真实Yaw值进行对比,判断是过度还是不足进而决定哪一侧的轮胎加压以纠正。
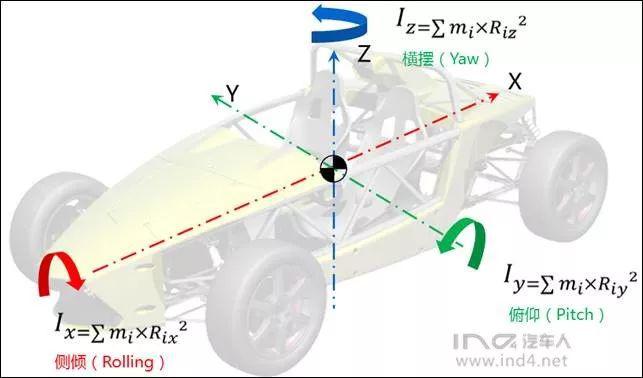
底盘专业问题第二十一篇---控制臂优化设计Control arm Optimization Yaw 是横摆角,而横摆角对时间微分,我们就得到了横摆角速度 Yaw-Rate
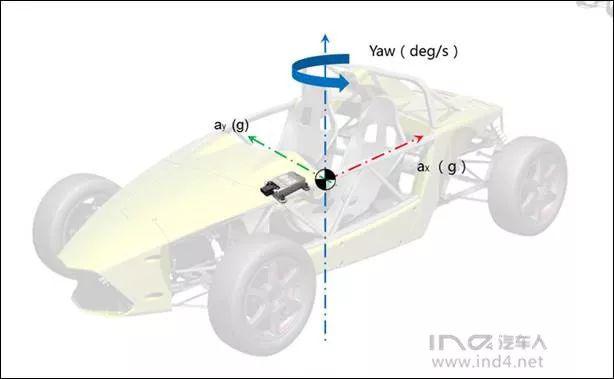
一般Yaw-G 传感器输出就是两个加速度(纵向、侧向)还有一个横摆角速度Yaw-rate(也叫偏航率)。
这一套理论看起来很容易理解,但下面我先提一下问题: 1 Yaw-G 传感器发出的Yaw-rate 真实吗?如何校验? 2 通过方向盘转角和车速,计算出的整车参考Yaw-rate能真实反映车辆应有的Yaw值吗? 带着这些问题,我们开始今天的讨论。我们先看Yaw-G的校验算法,我们知道,车辆在弯道内前后轮的外侧车轮转速都大于内侧车轮,所以利用轮速差我们可以估算出车横摆角速度(偏航率)。
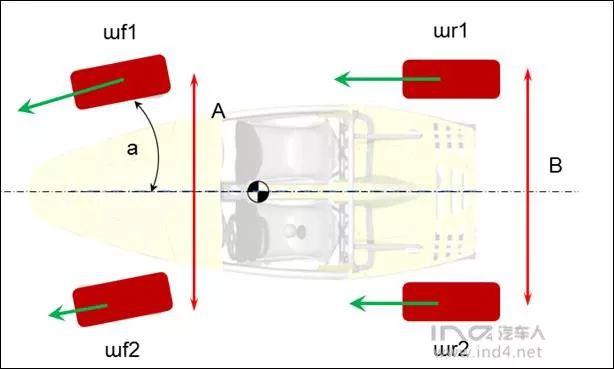
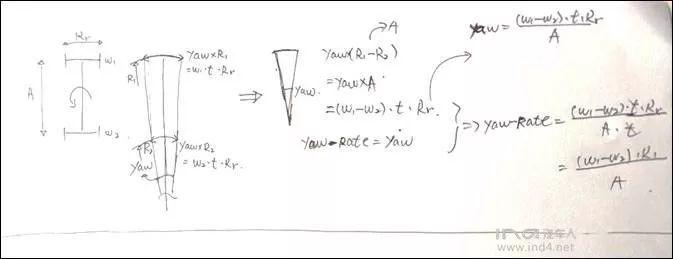
1)轮速差估算横摆角速度,为方便起见,我们列出适用于前后轮的通用公式。 Yaw-rate1=(外侧轮速-内测轮速)/轮距*cos车轮转角 关于这个公式的推导过程,如下图所示(抱歉,为了节省时间,直接手绘上图了)。
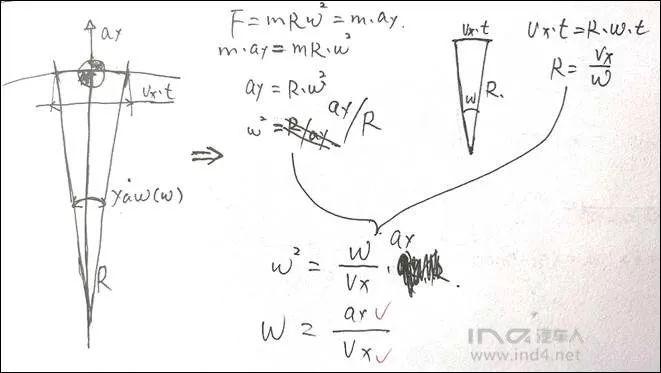
如果我们套入前轮,估算Yaw-rate就是 Yaw-rate1=(wf1-wf2)*Rr/(A*cos(a)) 相同的操作,我们也可以带入后轮,因为后轮没有转向角,所以cos(a) 等于1 ,但通常情况下,更愿意取驱动轮的轮速差来估算。 用这种方法可以使用最少传感器的情况下估算出车辆的横摆角,但这里我们不得不面对一个问题,比如在高G 的工况,比如沥青路上急转向,由于侧向加速度引起重量转移会导致内外侧车轮的滚动半径差异(外侧受压变小,内侧载荷减小而变大),这样的结果使得通过轮速估算的横摆角存在了偏差,所以通常情况下还要根据侧向加速的值对上面的横摆角进行修正。 Yaw-rate1=Yaw-rate1 X K 2)侧向加速度-车速法,由于通过四个轮速能计算出车辆前进速度,而侧向加速度则是通过yaw-G 传感器获得,通过两个物理量,我们也可以估算出横摆角速度。 Yaw-rate2=侧向加速度/纵向车速 同样,关于这个公式的来历,也进行一次推导。如下图所示
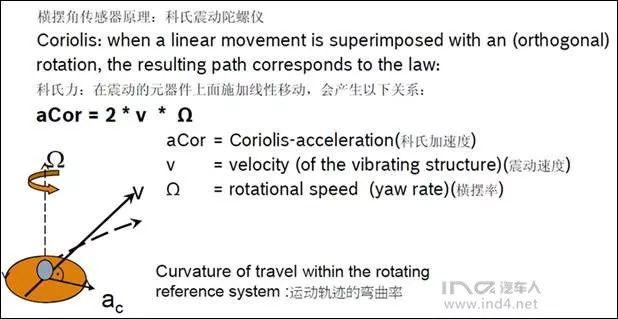
3)第三种就是Yaw-G 传感器通过惯性测量而发出的车辆质心的Yaw-rate。而Yaw-G 传感器又分集成式和独立式,独立式Yaw-G传感器安装在车身质心附近,通过串口实时发送ax/ay以及Yaw-rate给ESP 模块。
而集成式则直接将加速度芯片贴在了ESP 电控模块PCB 板上。
关于Yaw-G 传感器更多信息,请关注之前的文章: 底盘专业问题第十五篇----车辆横摆-加速度传感器Vehicle Yaw-G Sensor 以上三种方法所估算或测量出的Yaw-rate 相互校验,就能真实表达出车辆的实际偏航率。那实际的偏航率要跟参考偏航率来进行对比,那么参考偏航率又从哪里获得呢? 我们明天继续和大家一起探讨。 ★IND4汽车人,国内唯一汽车行业专业知识和人才交互平台。 想阅读更多的原创文章、学习更丰富的独家课程、与行业大咖深入交流,应用市场下载“IND4汽车人”,带给您更佳的学习和阅读体验。 |


【本文地址】
今日新闻 |
推荐新闻 |