自动驾驶控制算法 |
您所在的位置:网站首页 › 汽车lqr啥意思 › 自动驾驶控制算法 |
自动驾驶控制算法
|
自动驾驶控制算法 - 横向LQR控制+前馈控制
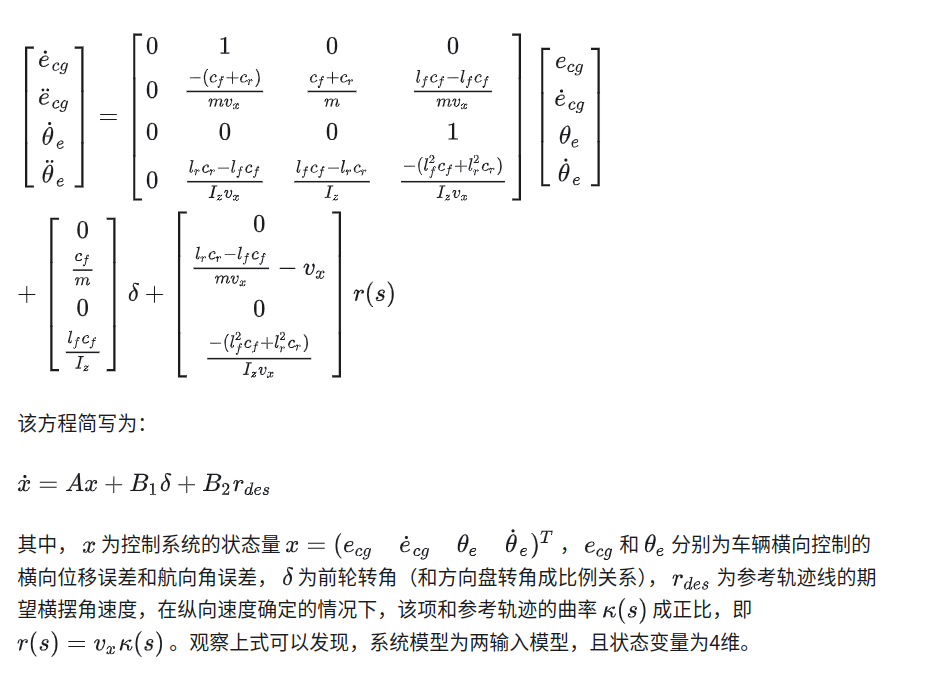
本文将介绍自动驾驶车辆横向控制中常用的LQR控制+前馈控制方法。LQR是线性二次最优控制,该控制器设计依赖于被控对象的模型方程,在之前的文章中,我们已经建立了车辆的动力学模型在道路坐标系的方程,LQR控制器也将基于该模型进行设计。 附赠自动驾驶最全的学习资料和量产经验以及1000T的资源分享:链接 我们再次把车辆动力学模型写出来,如下,其中各变量的含义参见上面的链接。
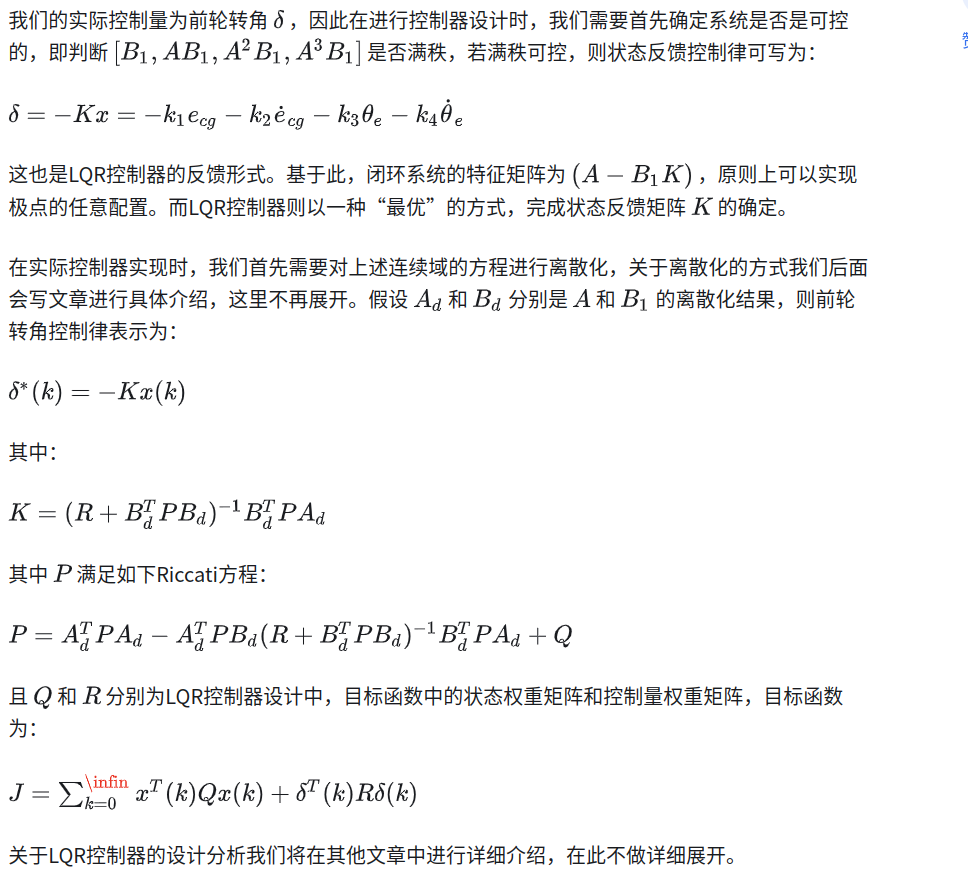
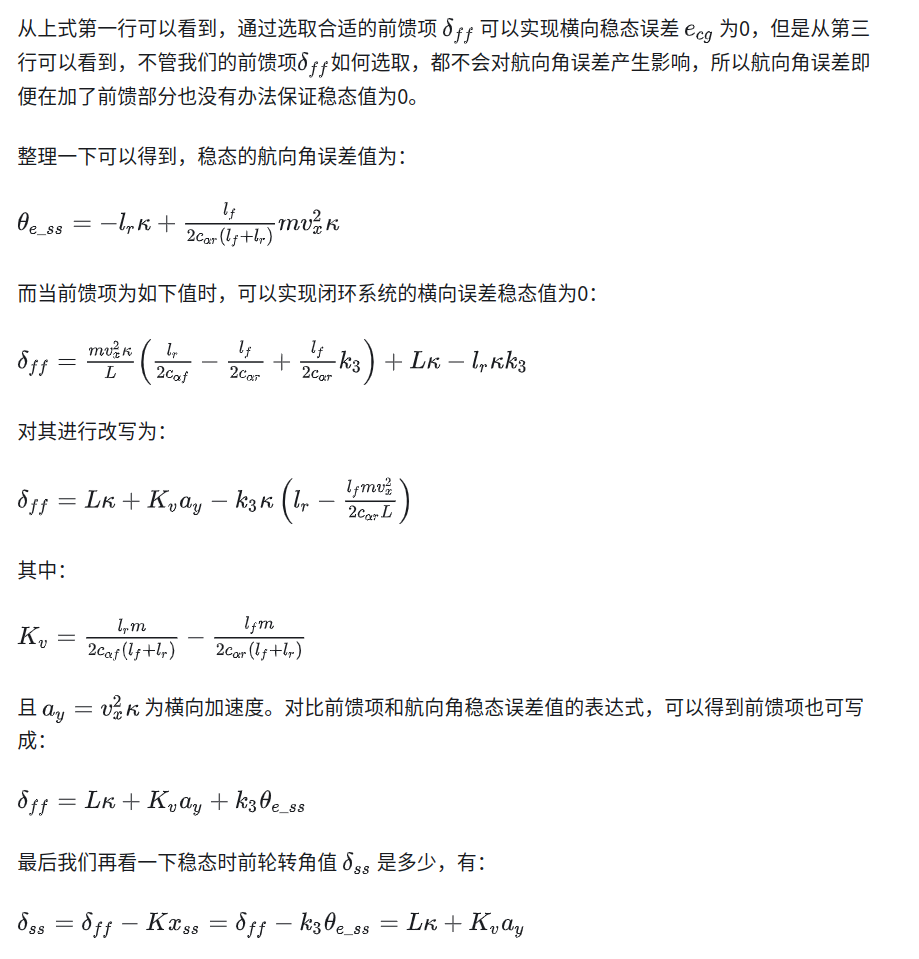
当前轮转角的控制律如上述所示时,整个闭环系统的方程变为:
|

【本文地址】
今日新闻 |
推荐新闻 |