毫米波雷达介绍及工作原理 |
您所在的位置:网站首页 › 毫米波雷达工作原理图解视频 › 毫米波雷达介绍及工作原理 |
毫米波雷达介绍及工作原理
|
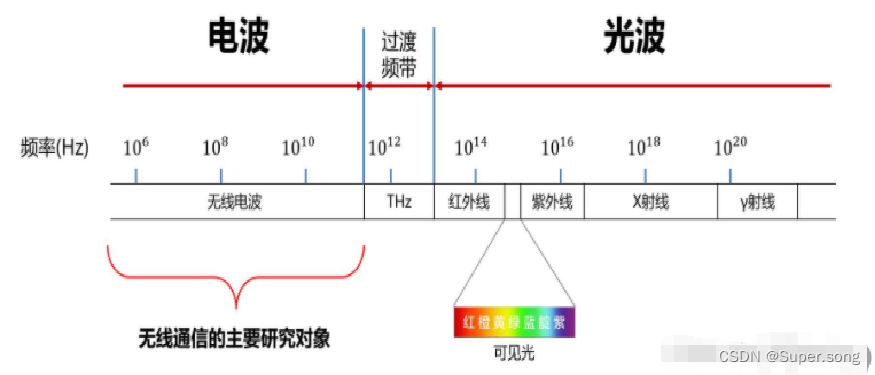
在介绍毫米波之前,咱们要先知道什么是电磁波,像汽车倒车雷达采用的是超声波原理,超声波有效距离为0.3-5米,这个要做一下区分。 什么是电磁波?
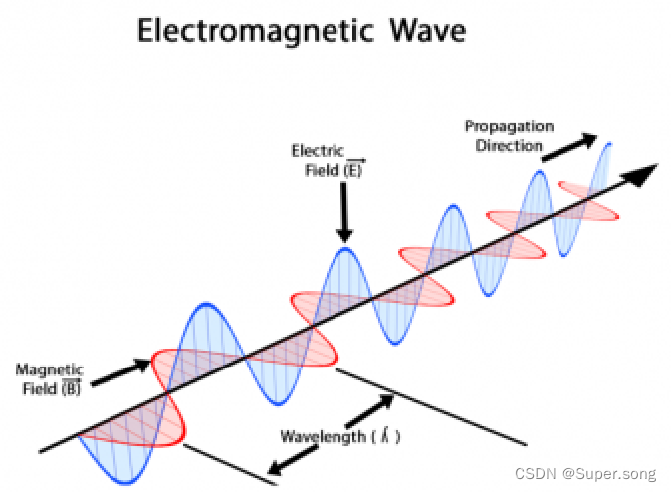
电磁波是以变化电场→变化磁场…交替发生产生进行传播的,所以电磁波是单位时间内完成周期变化的次数,是描述周期运动频繁程度的量。 波长是指波在一个振动周期内传播的距离,波长 = 速率/频率。(波长和频率成反比关系) 电磁波的频率和波长
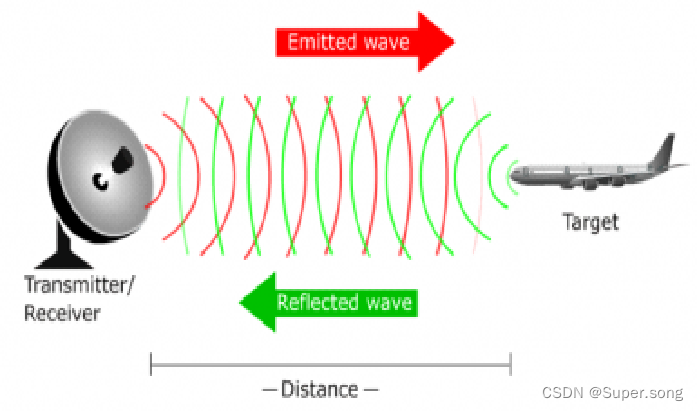
电磁波是无线通信、雷达使用的主要手段。 电磁波由交变电场和磁场构成,可以在真空、空气、自由空间传播。 频率:场变化的快慢,每秒钟变化的次数; 波长:场变化一个周期传播的距离; 频率决定了雷达的基本属性。 电磁波的传播特性电磁波的特性主要遵循麦克斯韦方程; 当它在一种介质(比如空气)传播时,碰到另外一种介质(比如墙体),会发生 反射 吸收 透射 衍射 反射能量占比,取决于介质; 金属的反射更强一些(军事防空都是雷达) 水吸收很厉害(微波炉) 也取决于波长,波长与介质的尺寸相比 如果小,则容易反射(射线类除外) 如果大,则容易透射 波长较长,也会发射衍射 毫米波的介绍毫米波 (mmWave) 是一类使用短波长电磁波的特殊雷达技术。毫米波其频段为 30~300 GHz,波长介于1~10mm的电磁波,毫米波雷达则指工作在毫米波波段的雷达。毫米波的波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点。使用在汽车上时其抗环境干扰能力强,可以满足车辆对全天气候的适应性的要求。毫米波雷达系统发射的电磁波信号被其发射路径上的物体阻挡继而会发生反射。经过捕捉反射的信号,雷达系统可以确定物体的距离、速度和角度,十分强大。 毫米波的基本特性
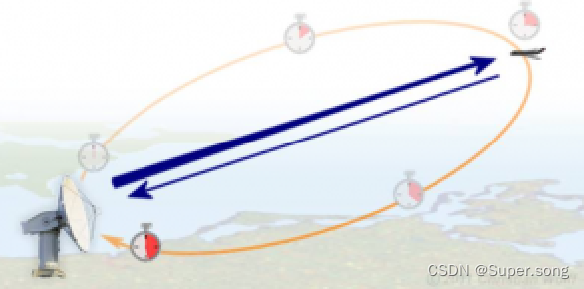
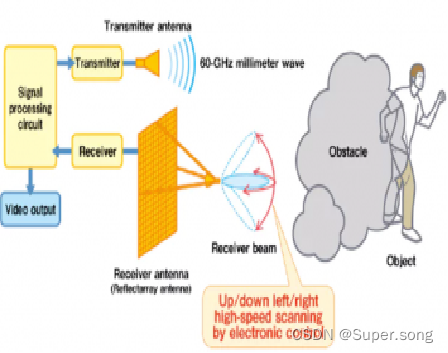
毫米波特性 1.基本沿直线传播,与光的特性类似 2.对于30cm的反射面,也能很好的反射 3.多普勒效应对步行速度也很敏感 4.传播损耗很大 5.室内多径效应明显 6.绕射能力 7.对衣物的穿透能力强 毫米波雷达的波束 由于使用微波波段,雷达一般以锥状波束形式发射电磁波;超声也发射波束,但是超声使用的机械波;激光和主动红外发射的可以认为是“射线;但是它的传播又和光很相似,所以类似发射波束类似手电筒的光;这导致与“线”扫描的激光和主动红外相比; 目标检测的可靠性要高一些(面反射)雷达的角度分辨力一般不是很高(点反射) 毫米波雷达的目标检测和测距 检测---基于反射波(回波)的有无。 测距---基于Time Of Flight,反射波与发射波的时间差,电磁波在真空和空气中速度大约3 * 10的8次方每秒但是有很多技巧。 比如简单脉冲雷达 比如对脉冲进行调制,可以获得更好的测距精度和距离分辨力 FMCW 对于毫米波雷达,测距距离都不远,所以TOF很小,那么简单的脉冲方式不适合,目前广泛采用FMCW,实现简单,性能可靠。 毫米波雷达的速度测量
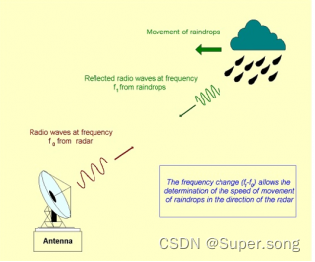
雷达对目标速度的测量,分为两种基于多普勒原理,径向速度测量 如果目标相对雷达有速度,那么会改变回波的频率,通过测量这个频率差,获得目标相对雷达的移动速度。但是不能测量切向速度 对于汽车应用,这个足够了,但是对于无人机应用,就不够了 基于位置(角度)跟踪的速度测量 毫米波雷达测速和普通雷达一样,有两种方式,一个基于dopler原理,就是当发射的电磁波和被探测目标有相对移动、回波的频率会和发射波的频率不同。通过检测这个频率差可以测得目标相对于雷达的移动速度。但是这种方法无法探测切向速度,第二种方法就是通过跟踪位置,进行微分得到速度。 毫米波雷达的角度测量
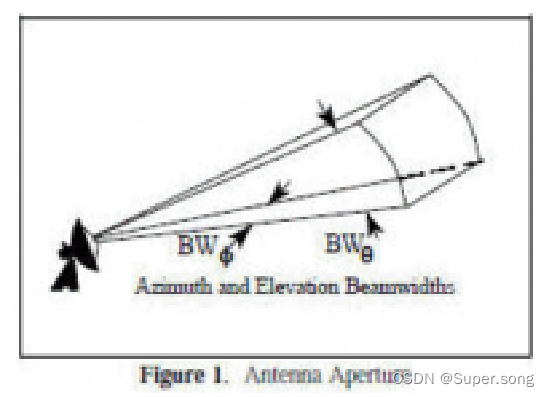
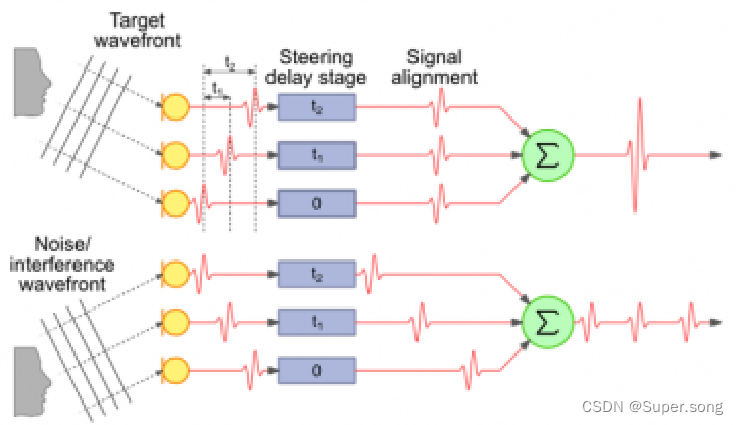
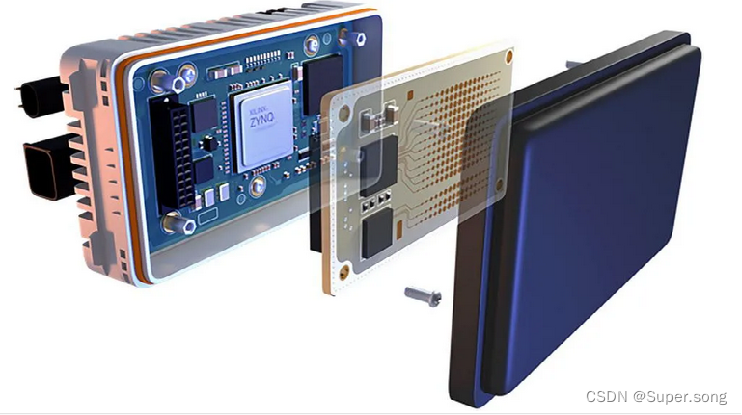
雷达对于目标方位角的测量,基本原理使用有指向性的窄波束窄波束的产生方式有向天线(比如喇叭天线,抛物面天线)需要机械部件,速度较低相控阵天线《多根天线+信号处理)功耗较大,体积大、但是灵活、速度快 毫米波的波长很小,从而天线尺寸很小,也易实现,所以很适合相控阵。 毫米波雷达系统的构成
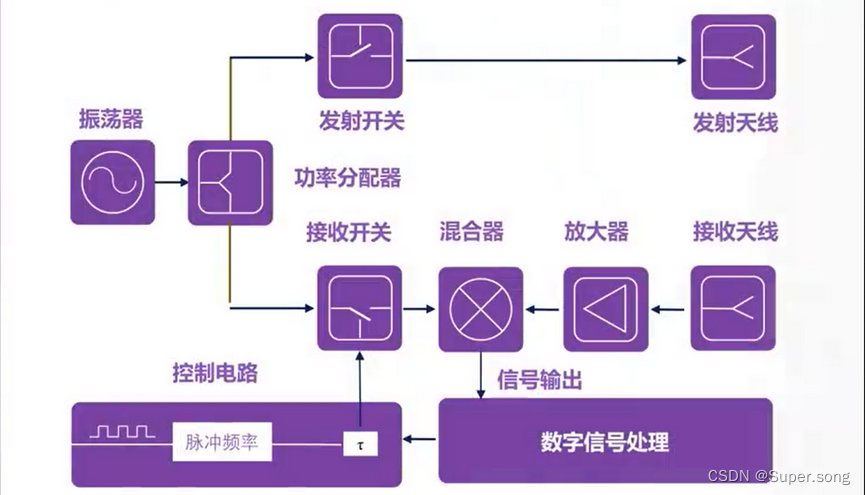
包含微带贴片天线、射频MMIC、ADC+DAC+基带信号处理(DSP或FPGA) 毫米波雷达天线 小型毫米波雷达主要使用 光学透镜天线---损耗小、口径增益大、体积大、微带贴片天线--损耗大、价格便宜、需要高频板材、一般需要多根天线来形成较窄的发射口径关键技术:毫米波雷达的微带贴片天线设计制造技术 在如此高的频段上,任何小的损耗都是不能容忍的,所以对工艺和设计要求都非常高。 毫米波雷达波长几个毫米,由于天线尺寸和波长相当,所以毫米波雷达的天线可以很小,从而可以使用多根天线来构成阵列天线,达到窄波束的目的,随着收发天线个数的增多,这个波束可以很窄很窄。另外一个因素是,由于波长很小,毫米波可以使用一种”微带贴片天线“,就是图片里这个样子,在pcb板上的ground层上铺几个开路的微带线,就能做天线。这个导致毫米波雷达的天线可以做成pcb板。和大家常见的wifi和蓝牙的pcb天线很像。 毫米波雷达射频部分射频部分主要包括PA、LNA、MIXER、Fiiter、VCO几个部分,在MMIC出现之前,设计难度非常大,所以Bosch、Delphi等几家大公司垄断了小型民用毫米波雷达的市场、价格也非常昂贵,一个车用毫米波雷达曾贵到几万人民币。MMIC出现,迅速降低设计门槛、成本、也使得新型的创业公司大量挤入这个市场,SiGe工艺已经量产,CMOS工艺正在路上,大量的芯片企业也在布局几家大的微波雷达MMIC厂商NXP、Infineon、ST。 毫米波雷达数字信号处理部分毫米波雷达的数字处理主要包括 波束形成和扫描算法 信号预调理 杂波处理算法 检测、测距、测速、测向算法 目标分类与跟踪算法 信息融合算法 数字处理是毫米波雷达稳定性、可靠性的核心,也是很多创业公司的弱项。 调频连续波毫米波雷达工作原理. 振荡器产生信号,信号经过功率分配器发射开关,发射天线发射给目标, 接收天线在接收到目标的反射信号后,经过放大器进行放大,混合器将发射信号与接收信号进行混频,得到IF信号,IF信号传给信号处理模块处理,控制电路控制整个雷达的工作 调频连续波毫米波雷达测距工作原理
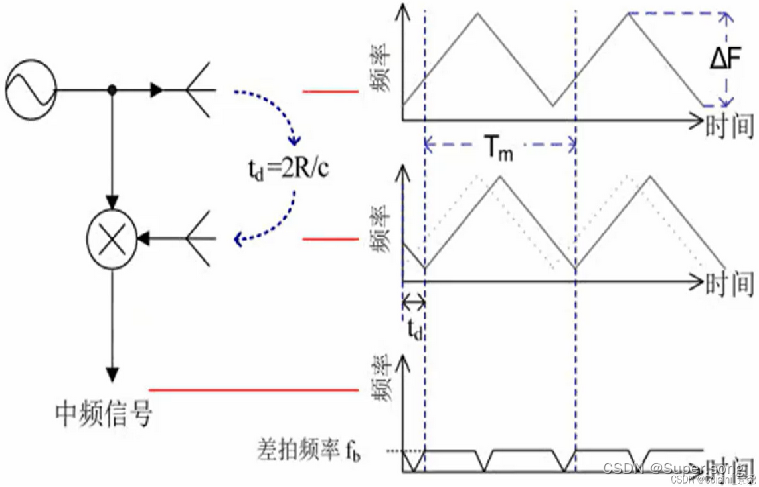
振荡器会产生一个频率随时间逐渐增加的信号,信号遇到障碍后,会反弹回来,时延是二倍的距离/光速(光速来代替毫米波传播的速度),返回来的波形和发出的波形有一个频率差,频率差和时延呈线性关系,物体越远返回波形,收到的时间越晚。反之,那么跟入射波的频率差值就越大。将两个频率做一个减法,就可以得到二者频率的差频(差拍频率),通过判断差拍频率的高低,就可以判断障碍物的距离。 调频连续波毫米波雷达测距计算原理
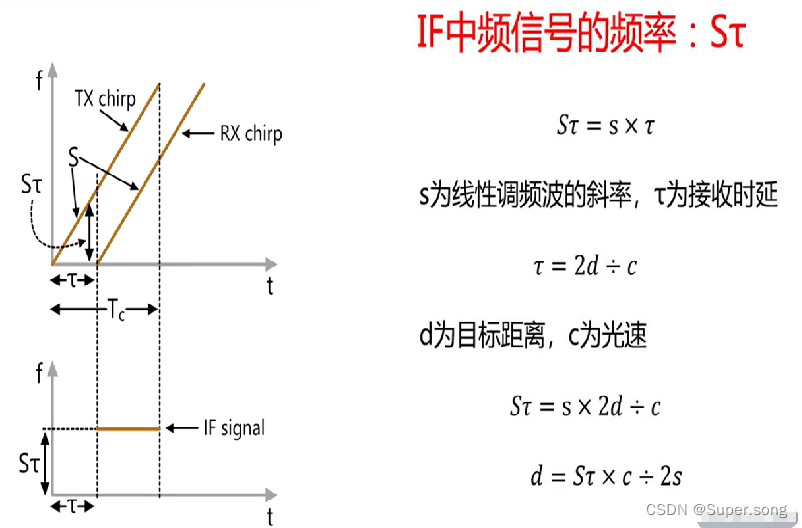
发射天线发射出一个线性调频信号,接收天线所接收到的信号实际上就是发射信号的延时副本,发射信号与接收信号进行混频,得到IF中频信号,IF中频信号的频率等于发射信号与接收信号的频率差。 s —— 线性调频波的斜率 τ—— 接收时延 d —— 目标距离 c —— 光速 会持续更新。。。
|
【本文地址】