自动驾驶执行层 |
您所在的位置:网站首页 › 比亚迪f3右后轮速传感器 › 自动驾驶执行层 |
自动驾驶执行层
|
作者:BUAA火车侠 成文日期:2022.11.08-2022.12.14 目的:简单了解一下自动驾驶执行层的线控系统,以及汽车的基础底盘结构;对自动驾驶从业者基本没什么用,纯浪费时间的玩意。 最近想发下OpenX标准的解读来着,但那个需要有大量表格,知乎表格支持不好,传图像还不清晰。放弃了~ 基础知识:《液压传动》《机械原理》《机械设计》《汽车构造》《汽车EE架构》《理论力学》《机械振动学》 1. 前言1.1 线控的对象在自动驾驶行业所谓的“感知-定位-决策-执行”的过程中,在末端的执行层,车辆需要自主执行决策层所给出的指令,具体的体现就是对油门(换挡)、刹车、转向、悬架的线控。 控制对象描述油门1. 总体控制对象:内燃机、电动机、或者混动系统的输出功率(转速n、扭矩T);2. 内燃机:控制节气门开度,进而控制进气量和燃油喷射量,最终控制输出功率(转速、扭矩);3. 电动机:通过PWM波控制电机输出功率;4. 混动系统:串联式(增程):与电动机控制基本类似;串-并联混联:存在内燃机-电动机的串-并联耦合-解耦控制;功率分流混联THS:逻辑复杂、略;换挡实现转矩、转速的变换1. 内燃机:一般都带有多档变速箱,需要根据一定的换挡逻辑进行控制;2. 电动机:大部分电动车只有单级减速器,无需换挡;3. 混动系统:增城混动:无换挡系统仅有单级减速器,无需换挡;制动1. 传统:对四个车轮的刹车卡钳/刹车鼓进行控制,对车辆制动;2. 动能回收:电动机执行切割磁感线逆过程,将机械能转化为电能并存储;转向转角的控制与回正;悬架根据不同的路面条件、载荷质量、行驶速度等,主动控制车身高度、悬架刚度、减振器的阻尼,使车辆的行驶平顺性与操纵稳定性达到最佳。*显然,纯电车以及增程混动的线控油门实现更加容易,油车、混联混动车则由于复杂的换挡逻辑和动力传输路径而较难实现; 1.2 航空业的两个故事线控技术(X-by-Wire)最早兴起于航空技术领域,利用电线传递能量,数据线传递信号,而"X"代表具体的功能部件,比如这个“X”是制动(Brake)时候就称为线控制动(Brake-by-Wire)。对于线控系统的理解,航空业恰好有着现成的完美案例—— 如果有读者像我一样是个ACI迷的话(加拿大空难调查片《空中浩劫》Air Crash Investigation),那么应该知道波音Boeing与空客Airbus在飞机控制的设计上采取了不同的策略,波音的大部分机型都采用了传统的机械传动 + 液压助力,各控制舵面与飞行员的操纵杆之间存在钢索连接,系统正常工作时候会有液压助力,而当电子系统失效时候,还有机械连接作为最后的备份,飞行员仍然可以使用自身的蛮力控制飞机姿态。而空客在设计之初就舍弃了操纵杆与执行机构间的机械连接,飞行员的所有操作均由传感器采集后经电信号传递。显然这么做的好处是极大简化了飞机的控制结构,飞机设计时的空间布局更加游刃有余,但弊端则是当电传系统失效后,没有机械系统作为备份。  《空中浩劫》系列节目 《空中浩劫》系列节目而关于“飞机的最高操作权限”上,波音和空客也有不同的看法,波音选择更信任飞行员,几乎赋予飞行员所有操纵飞机的最高权限,在出现问题时会给飞行员提供尽可能多的信息,让飞行员去做决策。而空客则认为人犯错的概率要远大于计算机,因此电脑判断飞机出现问题时候,会直接干预飞机控制,也会阻止飞行员做出可能会导致飞机失控的动作,但最高决策权还是交给飞行员的。 比如飞机转弯时,737可以在自动驾驶模式下设置横滚角度:10/20/30度,达到不同的转弯效果,也就是“转大弯或者转小弯”,但空客320就不行,在行动驾驶模式下转弯,计算机会以“最大过载不超过1G”来控制飞机的横滚角度,所以320给飞行员自助操作的权利要比737小很多。 这里面涉及到智能技术发展下的社会道德、伦理问题,这与自动驾驶L3+的发展需要面对的道德伦理问题是一致的。 如果读者能够理解上面的故事,那么接下来要讲述的汽车上的线控系统,其本质都与之大同小异。  波音737的俯仰控制机械系统 1.3 为什么是液压(Hydraulic system) 波音737的俯仰控制机械系统 1.3 为什么是液压(Hydraulic system) 另外,没有了解过《液压传动》的读者可能不太理解液压系统在动力传动中的地位。液压的优点非常多,但最核心的是:能够以很小的体积、简单的结构输出非常大的推力或扭矩,实现低速大吨位的运动。这源于初中学过的帕斯卡定律_百度百科 (baidu.com)——不可压缩静止流体中任一点受外力产生压强增值后,此压强增值瞬时间传至静止流体各点。在水力系统中的一个活塞上施加一定的压强,必将在另一个活塞上产生相同的压强增量。而根据 P = F/ S ,如果输出活塞的面积是输入活塞的面积的10倍,输出力将增大10倍。  液压的基础原理 液压的基础原理而以液体作为动力传输媒介,使得液压传动的安装布局具备很大灵活性,传输距离也非常长,这是常规的发动机/ 电动机 + 减速机构无法达成的。因此,对于飞机的操控、工程机械的控制、汽车的控制这些需要低速大吨位输出的场合下发挥着重要作用。 而液压系统一直面临的一个问题就是“渗漏”,尤其是在液压组件老化之后难以承受高压,油液渗漏是每个修车师傅绕不开的噩梦,且车辆去保养时候经常需要加刹车油和转向助力油。当然,后面我们会讲到,目前乘用车的线控执行系统中,越来越多采用电机代替液压直接驱动执行机构,但这是因为乘用车的需要的力道比较小,在大型商用车、工程机械领域,液压仍然难以替代。  液压油的渗漏 液压油的渗漏对于涉及液压的制动、转向系统,本文不会放出各种眼花缭乱的液压管路图(因为我现在也看不懂),而是重点讨论其基本的原理,因此可以放心食用。  挖掘机与液压臂 挖掘机与液压臂 Ref: Hydraulic machinery - Wikipedia 漏油_百度百科 (baidu.com)2. 线控制动系统本节将沿着制动系统的演进过程:真空助力液压制动、ABS、ESP、电子液压制动EHB、以及电子机械制动EMB来讲述线控制动系统。开局先放一张制动系统演进的示意图,接下来的内容都会围绕该图展开:  制动系统的演进2.1 传统的真空助力 制动系统的演进2.1 传统的真空助力 汽车刹车的最终执行过程无非是:刹车蹄片在液压的作用下产生位移,与刹车盘/ 刹车鼓接触并摩擦,将机械能转化为热能耗散(乘用车一般用液压助力,重型卡车一般用高压气体助力,本文只讨论乘用车领域)。而驱动刹车蹄片的液压管路的压力来自何处呢?最开始,刹车力完全来自于人力猛踩刹车踏板,如上世纪的很多老式拖拉机就是如此。可以想象,依靠纯“脚力”把上吨的汽车刹停是一件十分费力的事情。  老式农用拖拉机 老式农用拖拉机因此我们希望给刹车加上助力。早期的刹车助力方式是真空助力泵,利用真空造成的左右腔室气压差来辅助刹车,再通过主缸Master Cylinder将该位移转化为液压力。而真空的来源则是发动机,发动机运转时将助力泵腔室中的空气抽出。具体的原理可见下方的参考视频,本文不做过多阐述。 PS:采用真空助力的方法,在高海拔低带,刹车性能会有较大衰减。因为大气压降低,左右腔室能够达到的最大压差也就受限。 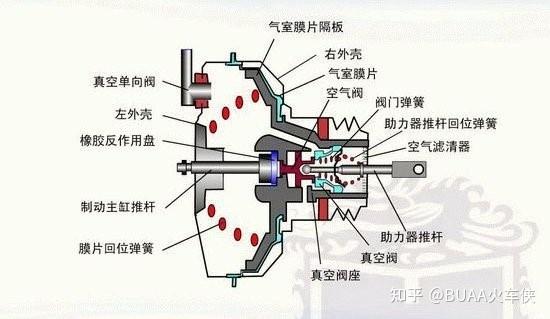 真空助力泵截面图 真空助力泵截面图 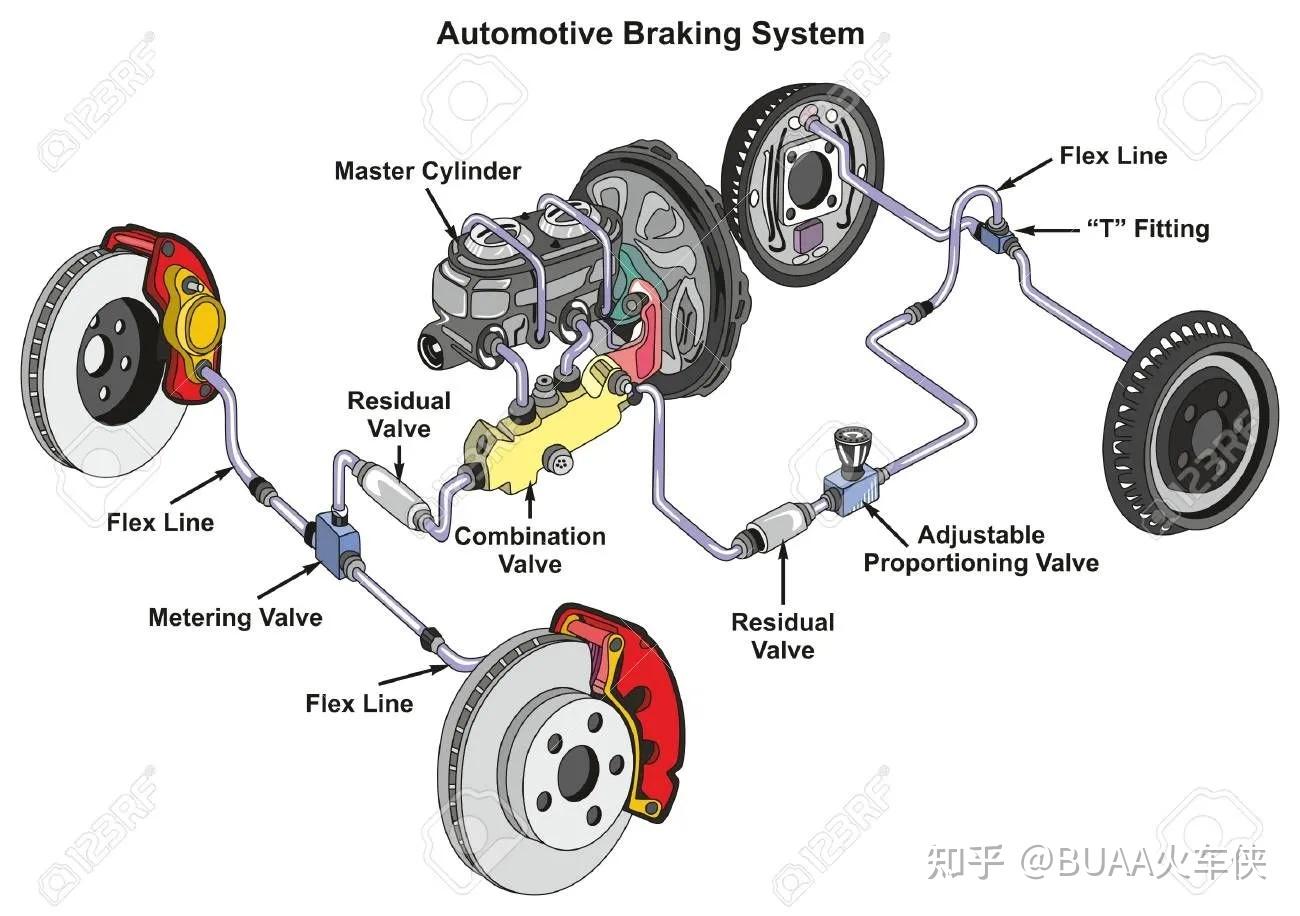 传统汽车刹车系统 传统汽车刹车系统 Ref: 汽车真空助力器,可以让你踩刹车轻松省力,你知道它的原理吗?_哔哩哔哩_bilibili(推荐观看) 液压传动系统的优点以及缺点 - 知乎 (zhihu.com) 2.2 ABS - Anticlock Brake System 防抱死系统预设1:在前面对于刹车的描述中,我们预设了“制动力会直接地、毫无保留地传递到车轮”。但此种预设存在严重的隐患——车轮抱死。 所谓抱死,就是指刹车力度过大时,导致车轮彻底停止转动,此时轮胎与路面由滚动摩擦转变滑动摩擦状态,并且车轮无法转向,极易失控并发生事故。这时候就需要防抱死系统(Antilock Brake system,ABS)发挥作用,制动时自动控制制动力大小,每秒刹-放数百次,使得车轮始终处于边滚边滑(滑移率在20%左右)的状态,以保证车轮与地面的附着力,也保证了车辆的可控性。 ABS需要增加的设备是一个ABS泵,当传感器检测到过大的滑移时,刹车系统在ECU控制下完成“刹-放”的过程,其原理很容易理解,不多赘述。  ABS原理 ABS原理 Ref: Anti-Lock braking system (ABS): Definition, Principle, Diagram, Working with Pdf (mechcontent.com)2.3 ESP主动电子车身稳定控制系统预设2:前面我们默认了液压制动力在四个轮子上是“均等分配”的,但能否通过“不均等的制动力分配”来达成更好的车辆操控性呢?答案是可以的。 这种思路是“不均等动力分配”的逆向思维,如同汽车安装前后桥的差速器,四驱系统通过分配前后轮的动力比改善操控,比亚迪的仰望通过四轮独立的动力控制完成如坦克一样的原地360°掉头。 在刹车时,常见的车辆失控一般是在入弯时候产生的转向不足以及出弯时候的转向过度问题,关于这两个名词的解释,读者可自行查阅。对于转向不足和转向过度的判断,则可以通过轮速传感器和IMU进行感知,这并不难理解。此时,可以通过ABS泵,对四个轮子的刹车力度和持续时间分别进行独立控制。比如转向不足时,增大右前轮的刹车力度,减小左后轮的刹车力度;转向过度时候增大左后轮刹车力,减小右前轮刹车力。具体的原理可以参考下面的视频,讲解非常到位(ESP的作用效果,可以救命) :  转向不足与转向过度 转向不足与转向过度 以上一般统称为ESC(Electronic Stability Control)车身稳定系统,最早的商业化产品是Bosch的ESP(Electronic Stability Program ),丰田的叫VSC(Vehicle Stability Control),保时捷叫PSM(Posche Stability Management),基本就是那几个英文单词的混搭,原理也都大差不差。 以上所有,就是自动驾驶时代到来之前,2010s之前乘用车市场的基本制动方案。而其实ESP已经有了“线控制动”的雏形,但其能够提供的制动力有限,作为主刹车会导致其寿命严重衰减,因此多作为失控时紧急介入的刹车方案,并不是常用的线控刹车方案。  典型的ESC系统架构,来自汽车EE技术漫谈 典型的ESC系统架构,来自汽车EE技术漫谈 Refl-ESP原理: 1. ESP车身稳定系统工作原理【纸上谈车34】_哔哩哔哩_bilibili(推荐观看) 2.4 线控制动的发展随着汽车的电动化和智能化浪潮,对于汽车制动产生了以下需求/ 发展方向。 脱离真空助力泵:真空泵存在的缺陷有体积大、响应慢,且由于其固有原理,无法实现对制动力的精确控制。并且,真空泵会消耗发动机的能量,这对于车辆的续航不利。对于电动车,更没有燃油机的怠速,因此需要采用新的刹车助力源,主要是后面会提到的高压蓄能器和刹车电机;节能:传统的制动意味着将动能转化为热能耗散掉,而新能源车则可以利用电磁感应将动能转化为电能存储起来,以延长电动车的续航。前面舍弃真空助力泵也有同样的作用。适用于ADAS/AD系统:制动系统应当与ESC、ACC等智能辅助驾驶功能相配合,更进一步地,作为自动驾驶执行层的输出层。这就需要电脑能够对刹车系统进行直接、精确、低延时的制动力控制。线控化,更高的集成度:刹车动力源与控制信号解耦,机械传统改电传动,刹车结构更紧凑,集成度更高。2.5 电子液压制动系统(EHB Electronic Hydraulic Brake)对于失去真空泵的车辆,构建新的液压制动力来源,我们会有什么想法?最直观的,采用电动机,搭配减速器增大扭矩,从而推动主缸活塞达成制动效果。但是,这种方法对于电机的体积/能效有极高的要求,对减速机构的机械强度、加工精度也有着极高的要求。因此基于电机的制动不是一蹴而就的,其经历了以下发展阶段: 2.3.1 高压蓄能器 在21世纪之前,业界多采用高压蓄能器:利用电机建立液压,将高压刹车油存储在蓄能器中,需要刹车时释放。这套系统的思路和重卡采用的气刹有相通之处,而想想就知道这套系统有多么复杂,成本是多么高昂。 2.3.2 电子真空泵 这套系统没有放弃真空助力,只不过采用电动真空泵EVP(Electronic Vacuum Pump)作为真空源,其他的原封不动。这对于整车的刹车系统改动非常小,因而开发成本很低。在一些油改电项目上,可以得到应用。 但其缺陷也很明显,首先其根本原理与传统的真空泵刹车一样,刹车踏板与制动缸之间存在机械连接,人脚产生的力是可以传到制动轮缸的,最终的制动力还是由“人脚力 + 真空泵辅助力”合并产生,这仍然是机械传动,而非线控系统,并不能满足ADAS/AD的需求。 其次,在电动、混动车上采用该系统,能量回收的效率较低。这是因为机械连接的特性决定了,当人脚踩下踏板时,会直接引发真空泵工作,将很大的刹车力道传导到车轮上;这时候,“通过电磁感应进行的能量回收”在制动过程中的占比就会相当有限。 最后,电子真空泵还存在噪音大,寿命短等缺陷。 2.3.3 电子助力器与Electronic Hydraulic Brake(建议:下段话逐句精读) 该系统彻底放弃了真空助力的方式,而直接采用前面提到的电机+减速器的电动伺服驱动主缸(Bosch iBooster),或采用电机+泵的电液伺服提供液压力(如Conti MKCx),这与近年来电机技术的发展是脱不开关系的。 类型原理典型产品电动伺服电机驱动主缸提供制动液压力源Bosch Ibooster, NSK电液伺服采用电机+泵提供制动压力源Continental MK C1显然,电动机也更为容易实现十分精确的制动力输出,这对于ADAS/ AD系统是十分重要的。更为重要的是,对电机的控制是线控系统,而非机械传动。这一次不需要刹车踏板与制动主缸存在机械连接,只需利用传感器采集踏板的行程,给ECU输入踏板位置信号,从而控制制动力的大小。人脚的力可以不传导到制动轮缸(其实也可以保留机械连接作为备份),几乎所有的制动力都由电机产生。 再然后,原来制动系统的主缸、液压管路直到轮缸的系统维持不变,制动液仍然是动力传递的媒介。那么,这种系统就叫做电子液压制动系统(EHB Electronic Hydraulic Brake)  EHB系统,来自汽车EE技术漫谈 EHB系统,来自汽车EE技术漫谈 上图是典型的EHB系统,该系统中,信号输入单元(刹车踏板)、控制单元(ECU)、与执行机构(电机与主缸)的布置是比较集中的,使用制动液作为动力传递的媒介,因此也EHB也被称为集中式湿式制动系统。 2.3.4 EHB的优缺点 优点: 首先,EHB通过踏板传感器、ECU和电机实现了制动系统的电气化/ 线控化,使之能够作为ADAS/AD的执行机构;线控化的EHB的刹车响应时间约为120~150ms,比传统制动的400~600ms大幅缩短,这意味着在100km\h的车速下,可以减少约10m的刹停距离,提升了车辆安全性;线控化的刹车系统中,踩下刹车踏板后,制动力不再直接输出到车轮上,而是会将“刹车信号”传给ECU,由ECU根据制动策略来执行具体的制动过程。因此,“动能回收”和“机械刹车”制动中的占比分配更容易调节,在低速场合下,“动能回收优先”的制动策略能够更好地节约能源,增加续航里程;EHB较好地整合了先进电子系统和成熟稳定地液压系统,不仅可以用于电动车,传统燃油车采用12V电源也可以驱动EHB,适配性很高;通过软件标定,很容易地实现不同的制动力曲线,营造出不同的刹车脚感或刹车灵敏度,满足用户的差异化的需求。 不同的刹车脚感调教 不同的刹车脚感调教缺点与改进: 可以看出,EHB系统主要对传统刹车系统的动力输入端做了改造,后续的液压部分并未更改。这种集中式的刹车系统仍然不能实现单轮制动力的调节;要实现ESC等功能,仍然需要引入对应的组件。如果彻底取消刹车踏板与制动轮缸间的机械连接,当电控软件/硬件失效时,则可能无法刹车,酿成事故。因此需要刹车系统备份,一般可以采用ESC系统作为系统备份(two Box),或者仍然在踏板上保留机械连接的分支,在电子系统失效时接通。EHB系统中仍然保留了较复杂的液压管路,液压系统放大了制动力,相较于后面要介绍的EMB系统,EHB仍然不算“完全体”的线控系统,因此也被视为一种过渡产品。2.3.5 典型EHB产品 典型的EHB产品有:Bosch公司的iBooster(intelligent Booster)、日立公司的E-ACT、德国Continental的Mkcx,大部分德系车企以及特斯拉、理想、比亚迪、蔚来等都采用了iBooster系统。  Bosch iBooster Bosch iBooster 1. 基本原理 如上图,驾驶员踩下刹车踏板,制动推杆(6)产生位移,踏板行程传感器(2)检测到信号,并将其发送给ECU(5),ECU综合计算出电机需要产生的力矩,然后经减速器传导到制动主缸(4)。可以看出,实际上iBooster系统保留了踏板(6)与主缸(4)之间的机械连接,作为安全冗余。 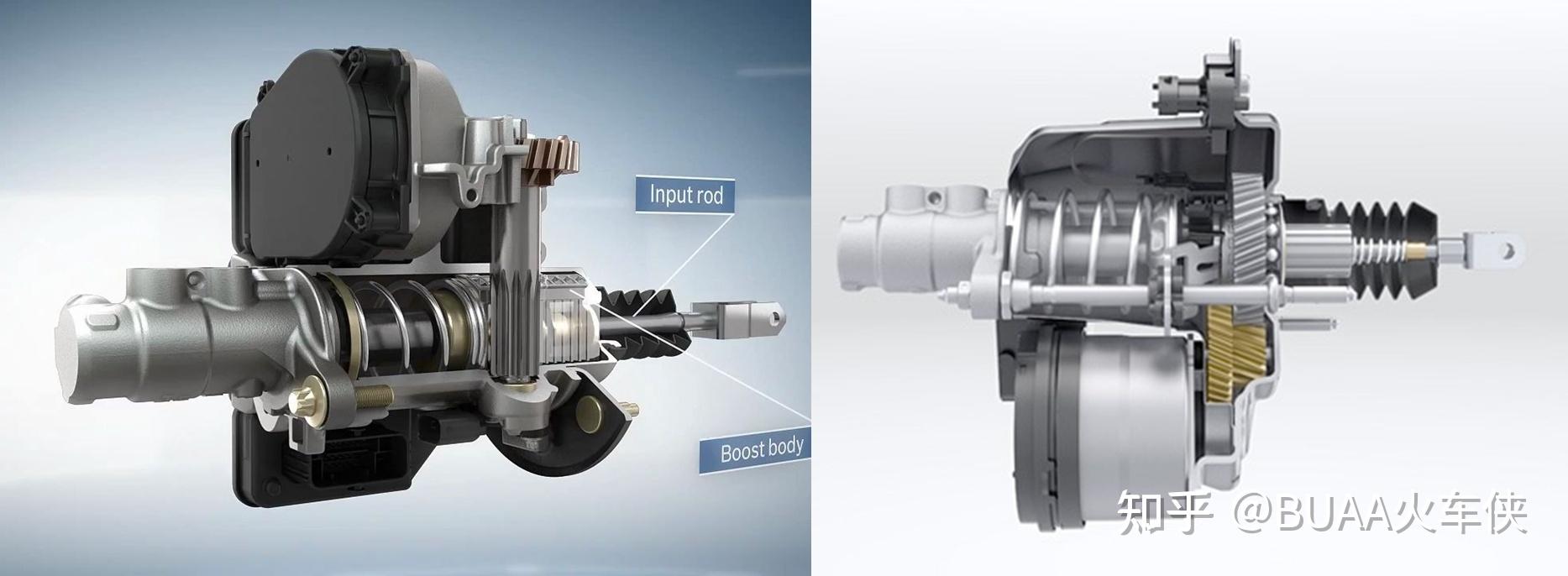 iBooster gen1(左)与iBooster gen2(右) iBooster gen1(左)与iBooster gen2(右)iBooster目前推出了两代产品,主要区别体现在减速机构上,第一代iBooster采用蜗轮蜗杆+齿轮齿条的两级减速机构,学过《机械原理的》应当知道蜗轮蜗杆是一种减速比很大、可以自锁的传动机构。而第二代的iBooster则采用了滚珠丝杠的一级减速机构。滚珠丝杠的结构更紧凑、重量更轻、控制精度也更高,但对于机加工的要求也更高。 2. 安全冗余 iBooster提供了两级安全冗余,一般地,iBooster会与ESP配合使用,两套系统称之为Two Box方案。iBooster与ESP使用一套液压系统。 正常工作时,iBooster电机推动主缸活塞,液压油会经过管路流过ESP进液阀,经过ESP后流入4个轮缸,从而产生制动力;当iBooster失效时候,ESP可以作为备份,独立控制制动液流入轮缸,但前面也提到了,ESP能够提供的制动力相对有限,且响应不够快;当iBooster和ESP都失效的时候,制动踏板与主缸的机械连接作为最后的保障,可以由驾驶员大力出奇迹进行刹车。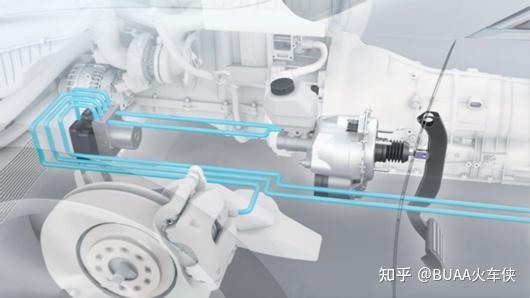 Bosch iBooster + ESP hev Bosch iBooster + ESP hev 3. One Box方案 Bosch的iBooster+ESP hev的方案采用了两套独立的模块,因此被称为Two Box方案,那么将ESP和EHB结合起来的方案就叫做One Box方案,减少了一个ECU和一个制动单元,提升了集成度,降低了成本。代表产品如Bosch的IPB(Integrated Power Brake)、Conti的MKCx系列、比亚迪弗迪、奇瑞伯特利也有相同的产品。比亚迪的汉EV即采用了与Bosch联合研发的IPB系统。  Bosch IPB Bosch IPB Ref: 【杂谈】——博世iBooster探秘 - 知乎 (zhihu.com) EN | Bosch iBooster - YouTube(推荐观看,Bosch视频) 02-电控制动-博世IPB (Integrated Power Brake)应用于自动驾驶(上) - 知乎 (zhihu.com) 2.6 电子机械制动系统(EMB Electronic Mechanical Brake)EHB保留了传统的液压管路,而由线控电机来取代中央的真空泵提供制动力。那么更进一步地,取消中央电机,直接将电机布置在四个车轮侧,一般可以将电机集成在制动卡钳上,伺服电机直接驱动制动机构。这有点像电子手刹的原理,但与电子手刹最大的不同是它需要能够产生足够大的制动力,并且制动线性要高度可调,响应要非常迅速。 如此一来就不需要刹车液压管路,此时,脚踏板与刹车系统之间的机械连接也彻底取消,所有信号都是通过电信号来传递,这也就是线控刹车的终极形态——电子机械制动系统EMB。由于EMB在每个车轮上都安装有独立的电机制动器,且不需要液压管路,因此又被称为分布式、干式制动系统。 可以看出,EMB真正实现了制动输入与输出之间的解耦,因此更加便于ADAS/AD系统输入信号,介入对刹车的控制。至于EMB的制动器,可以分为无自增力制动器、有自增力制动器、机电盘式制动器 和机电鼓式制动器等,本文不展开详细论述,感兴趣读者可以自行查阅。 制动系统的演进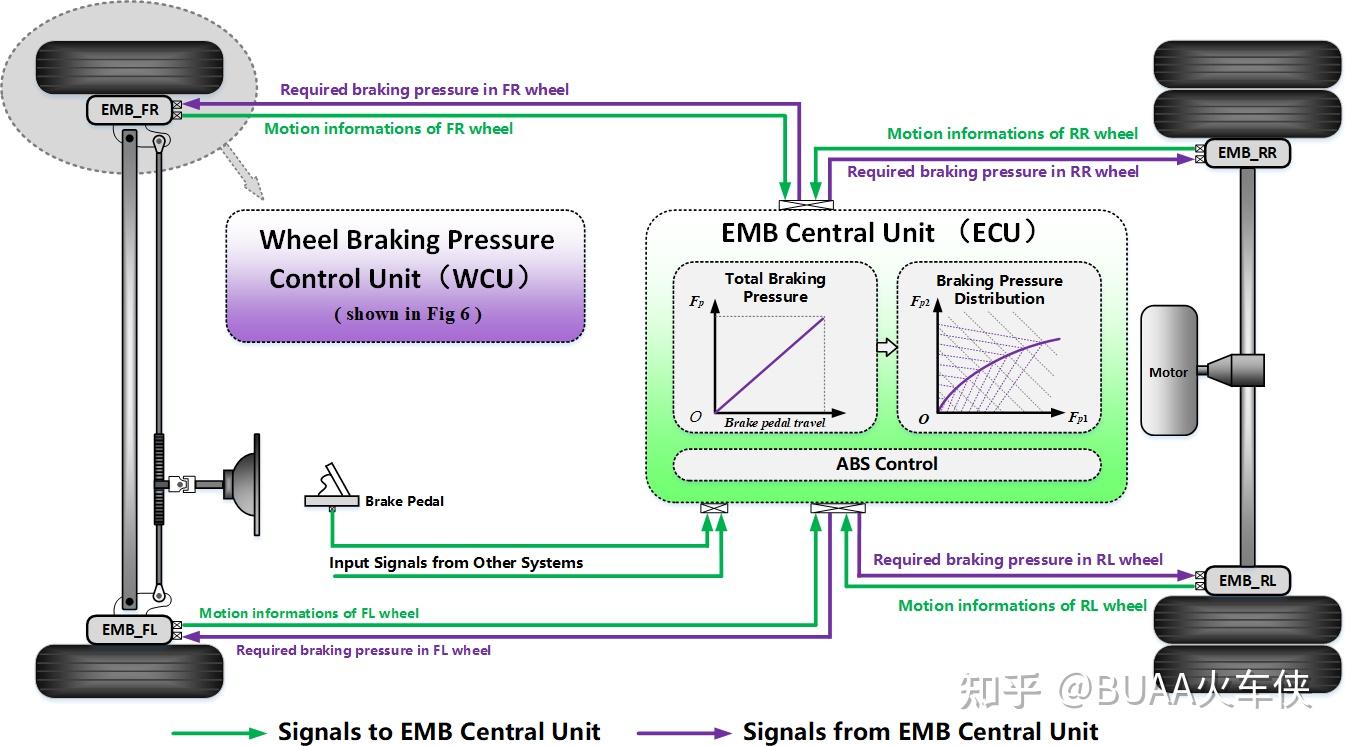 EMB的框架图 EMB的框架图 EMB具备的优点有: 刹车系统的液压管路和机械连接被大幅减少,其空间结构更为紧凑,重量更轻,便于布置和装配(总布置部门应该会很开心);线控伺服电机的响应速度更快,平顺性更好(这与EHB一样)由于EMB中四个电机的控制相互独立,因此ECU可以通过线控制动系统,使四个轮缸完成不同的任务,如增压,减压或者保压,这就使得如ABS、ESP、TCS(Traction Control Sysyem,牵引力控制系统)等功能的实现更为简单;由于EMB中输入输出的彻底解耦,可以更自由地定义踏板脚感。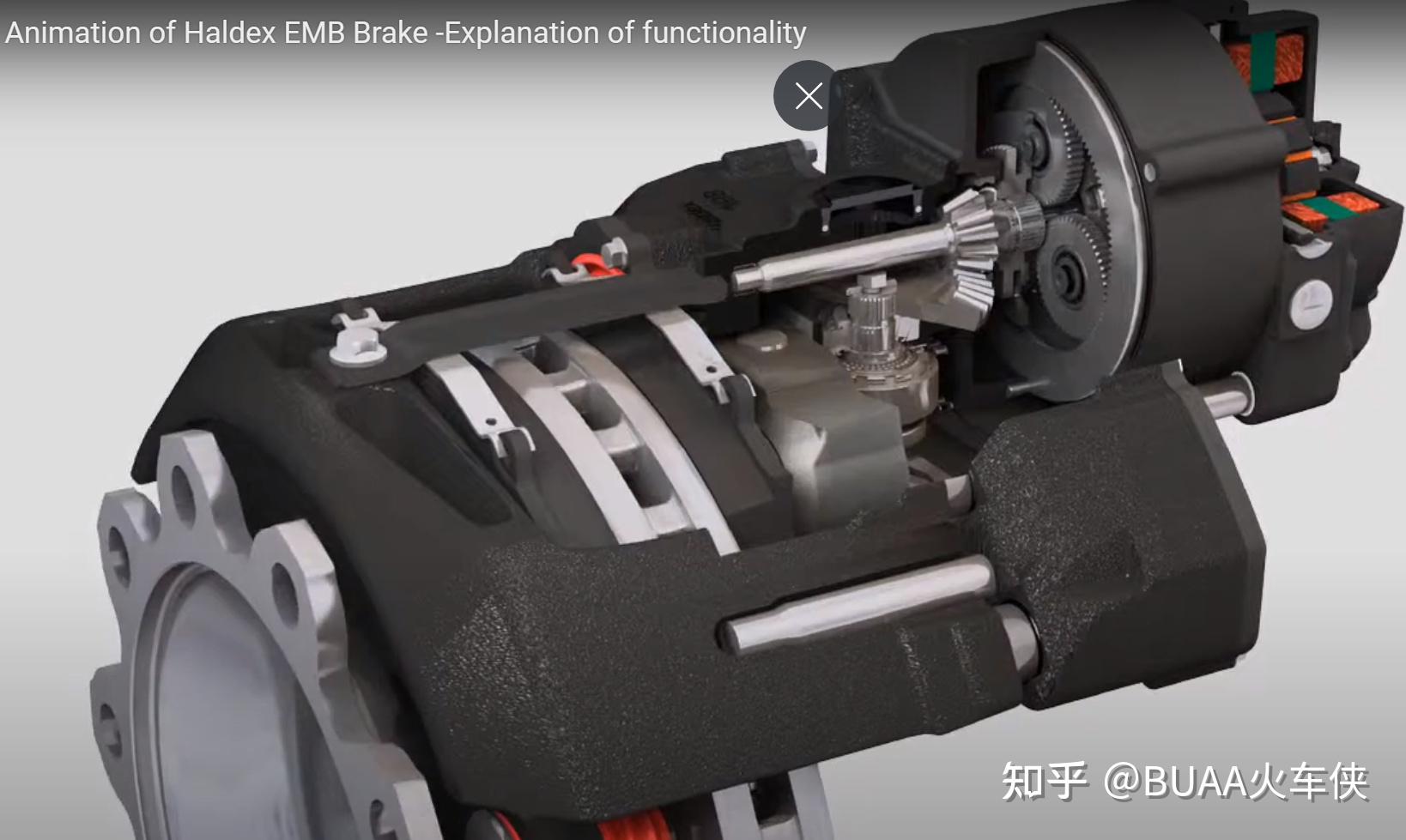 典型的EHB系统,来自瑞典Haldex 典型的EHB系统,来自瑞典Haldex 尽管EHB的原理十分简单,愿景十分美好,但现实中却有很多困难的工程问题,这主要集中在轮侧的执行机构上。 也正是由于轮侧制动器的集成度太高:其集成了电机及其驱动模块,将电机的转动转化为直线运动的减速模块,以及如转角、距离、扭矩等传感器。而轮侧空间又十分有限,因此EMB执行模块需要非常紧凑,工程难度大,成本居高不下;轮侧的工作环境十分恶劣,震动剧烈,数百摄氏度的高温,这对高集成度的制动器是一个严峻的考验;也是由于1,制动器设计受限,其体积和功率不可能太大,导致制动力不足,难以满足普通轿车制动功率的要求;另外,从功能安全的角度出发,彻底将刹车的动力源与控制信号解耦,会使得其可靠性下降,电控系统的故障会造成严重的后果。因此,EMB也需要使用一个备用刹车系统,但目前应该还没有稳定可靠的备用系统。基于上述原因,目前的EMB没有大规模地量产应用。 举个电机设计的例子,证明EHB的实现有多难: 首先,电机需要以极小的体积爆发出1-2KW的功率满足制动需求,因此目前只能采用永磁电机;普通的车载12V电源无法满足高功率的驱动,因此还需要设计42/48V的驱动电源,而高压系统的安全隐患更高;刹车片附近温度极高,而众所周知,高温会使得磁性消退,电机性能衰减严重;高速电机和滚珠丝杠这种较精密的机械需要一个低震动的工作环境,但是安装在轮侧的执行器属于“簧下零件”,没有弹簧的减震,完完整整的吃下了所有路面的震动。电机:我累了,毁灭吧 Ref: 电子手刹和机械手刹,用起来有什么区别_哔哩哔哩_bilibili(58) Animation of Haldex EMB Brake -Explanation of functionality - YouTube【THS控制解说系列】动能回收控制 - 知乎 (zhihu.com)2.7 混合线控制动系统(HBBW hybrid brake by wire system)根据之前的论述,EHB的液压管路复杂、集成度较低,而EMB提供的制动力有限、难以满足失效备份需求。因此,业界考虑将EHB和EMB结合起来,构成一种混合线控制动系统HBBW。 在HBBW中,作为主制动轮的前轮采用EHB,可以提供更大的制动力,并且可以提供失效备份以满足法规要求;而对制动力需求不大的后轮则采用EMB,可以缩减液压管路的长度,同时能够实现电子驻车功能。当前Audi的EHCB(Electric hydraulic combi brake)即为最具代表性的HBBW系统。  Audi的EHCB系统-整体架构 Audi的EHCB系统-整体架构 Audi的EHCB系统 - 轮侧机构 Audi的EHCB系统 - 轮侧机构 本章Ref: 懂车老王|特斯拉刹车事件技术解读,电动车刹车靠谱吗?_哔哩哔哩_bilibili(推荐观看)五万字读懂汽车线控制动系统(BBW) (qq.com)(重复内容太多,只需要看前20%的内容)3. 线控转向本章依然会沿着汽车转向系统的演进过程来叙述:原始转向系统、带有转向比的转向系统、机械液压转向HPS、电子液压转向EHPS、电动助力转向EPS、以及最终的纯线控转向系统。开局先放一张转向系统演进的示意图,接下来的内容都会围绕该图展开:  转向系统的演进过程 3.1 原始的机械转向系统 转向系统的演进过程 3.1 原始的机械转向系统 最原始的车辆转向系统中,方向盘连接转向柱,而转向柱再与连接两个车轮的拉杆连接(下图中甚至没有可以改变扭力输出方向的万向节)。通过该套机械结构,方向盘的转动即可传导到车轮上。实际过程中,两侧车轮的转向角度是不同的,对转向几何感兴趣的读者,可以自行搜索“阿克曼角”。  最原始的转向系统 最原始的转向系统 这种转向机构既没有转向助力,更没有减速机构,方向盘转角与车轮转角相等,转向比为1:1。卡丁车由于体积有限,采用的即为上述转向系统。  卡丁车 卡丁车 而这套最原始的转向系统存在两个问题: 乘用车一般重量1吨以上,商用车可能重达数十吨,凭人力很难拧的动方向盘,例如很多玩过卡丁车的都表示胳膊拧方向盘十分费力。采用1:1的转向比,在高速情况下,细微的转动就可能导致偏航,十分危险。因此,一般的乘用车转向比会达到12:1到20:1左右,一般家用车打死方向至少需要转一圈半,F1赛车为了提升操控灵敏性和反馈感,转向比会在6:1左右。大转向比一方面可以限制方向盘的细微转动,提升高速巡航时稳定性,另一方面更长的行程也可以增加转向的扭矩,更加省力。 学过《机械原理》的应该知道,可以减速增扭的机构,无非就是齿轮组、齿轮纸条、蜗轮蜗杆、滚珠丝杠等机构。根据转向机构的空间特性,齿轮齿条和滚珠丝杠更为常用:  齿轮(斜)齿条转向机构,来自日本NSK 齿轮(斜)齿条转向机构,来自日本NSK 滚珠丝杠(循环球式)转向结构,来自瑞典SKF 滚珠丝杠(循环球式)转向结构,来自瑞典SKF 滚珠丝杠由于将滑动摩擦转换为滚动摩擦,其传动效率更高且寿命更长。更重要的是,滚珠丝杠具有自锁的特性,即扭矩只能由转向柱传递给滚珠丝杠,反之则不行;而齿轮齿条则不会自锁,齿轮和齿条可以相互传力(此处仍然需要一定的机械原理知识)。这也就是说,当行驶在不平坦的路面上时,对于齿轮齿条机构,崎岖的路面可能引发车轮的被迫转向,进而反向传导至方向盘上;而对于滚珠丝杠机构,只要驾驶员不转动方向盘,车轮也不会因为路面形态发生任何转向。  越野场景 越野场景鉴于上述特性,滚珠丝杠转向器,也叫循环球式转向器更广泛地应用在硬派越野(如奔驰G、丰田陆巡、三菱帕杰罗等)、以及载重量更大的大客车和大货车上。而更强调操控的家用车辆则常采用齿轮齿条转向器,其结构更简单,成本更低,转向的反馈也更加灵敏(俗称“有路感”)。 即便采用了减速增扭的机械结构,转向需要的力道仍然不小,对于拉货的重型卡车就更是如此。比如前面提到的老式拖拉机,笔者小时候在田间曾看到司机师傅转动方向盘时小臂青筋鼓起,看得出来十分费力。再比如新中国成立之初生产的解放卡车,司机师傅都练就了一身好臂力。因此,和刹车系统一样,业界想到给转向系统“助力”。 而根据出现时间顺序,转向助力系统可分为:机械液压助力转向(HPS)、电动液压助力转向(EHPS),以及电动助力转向(EPS)。  老式解放卡车 老式解放卡车 Ref: 循环球式转向器_百度百科 (baidu.com)Miniature ball screw series SP - YouTube(瑞典SKF滚珠丝杠,推荐观看)3.2 机械液压转向(HPS Hydraulic Power Steering) 机械液压助力转向系统早在20世纪初就被发明,不过规模化的应用要等到二战结束。在这套系统中,转向丝杆上集成了一个可以左右移动的液压缸,由三通阀控制其移动方向。  机械液压转向系统HPS 机械液压转向系统HPSHPS具体的工作原理是:液压泵由由发动机带动,当发动机启动时,液压泵时可维持运转。而方向盘的转动会带动三通控制阀的开闭:方向盘左转时候,左边侧节流阀打开,液压油经过节流阀流向液压缸驱动车轮向左转,右转同理。方向盘不转动时候,液压油经过中间的节流阀流回储油罐。(这里需要基础的《液压传动》知识)   三通阀的类比:HPS的工作原理 三通阀的类比:HPS的工作原理可以看出,HPS会持续消耗发动机的能量,带来的是油耗的上升,并且,液压泵输出功率会随着发动机的转速而发生变化,因此其转向助力的大小并不稳定。 Ref: 机械式液压动力转向系统_百度百科 (baidu.com)Rack And Pinion Steering System - YouTube(推荐观看,HPS具体的工作方式)Steering Rack - YouTube2.3 电子液压转向(EHPS Electro-Hydraulic Power Steering)电子液压转向EHPS的工作机理类似于前面提到的电子液压制动EHB,其将液压泵的动力源由发动机替换为了电动机,并且引入了扭矩传感器和ECU来替代由机械控制的液压阀。扭矩传感器检测到方向盘的传来的扭力,ECU收到传感器的信号后,控制液压阀的开闭和电动机的启动,即可完成助力转向。  电子液压转向EHPS架构 电子液压转向EHPS架构相比HPS,EHPS中电动机无需时刻工作,对发动机动力的削弱少很多;并且电动机的输出功率更加平稳。液压系统能够输出的力道非常大,因此更多应用在商用车和重型卡车领域。 Ref: 电子液压助力转向系统_百度百科 (baidu.com)3.4 电动助力转向(EPS Electric Power Steering)电动助力转向EPS的原理则有点类似前面提到的电子机械制动EMB。扭矩传感器检测到方向盘传来扭矩数据后,将其传递给ECU,ECU根据一定的算法逻辑,控制电动机输出扭矩,经过齿轮机构减速后作用于转向柱上,完成转向助力。 当然,电机和减速器可以有不同的布置,其动力可以驱动转向柱,也可以直接驱动转向丝杆,这都不影响我们对其原理的理解。   电动助力转向,From 瑞典NSK 电动助力转向,From 瑞典NSK相较于EMB的难产,EPS的普及更为迅速,目前几乎所有新量产的乘用车都采用了电动助力转向。其中一个重要原因就是:转向系统的需要的输出功率相对刹车系统较小,电机更容易带动,一般乘用车的转向电机功率在300~800W之间。 EPS的优点有: 直接省去了液压系统,大幅简化了转向系统,提升了可靠性,降低了成本;电机+齿轮可实现对转向角度的精确控制,实现了对转向的线控;人力输入的机械连接并没有被切断,当电动助力失效时候,仍然可以通过人力来控制车辆,提供安全备份。随速转向系统:有过驾驶经验的读者应该知道,在低速状态下,方向盘一般十分轻便,而高速状态下方向盘则较为沉重,不易转动。这就引出了“随速转向系统”。如果在高速情况下,转向助力维持低速的状态,那么轻轻拨动方向盘就可能造成很大的转向动作,进而造成严重的事故。 因此,转向助力应当随着速度的增加而减少,这个减小可以是线性的也可以是非线性的,都可以通过ECU程序来进行标定。我们在车评节目中经常会听到“转向随速增益”这个词来形容方向盘的手感,就是这个意思。 Ref: Automobile Electric Power Assisted Steering (EPAS) and NSK - YouTube(瑞典NSK视频,推荐观看)电动助力转向系统_百度百科 (baidu.com)3.5 线控转向在电动助力转向的基础上,进一步把转向柱也去掉。采用一个转向模拟器来收集方向盘的转动角度,并给驾驶者提供一定的转向阻尼。ECU根据转角信息,驱动电机完成转向动作。 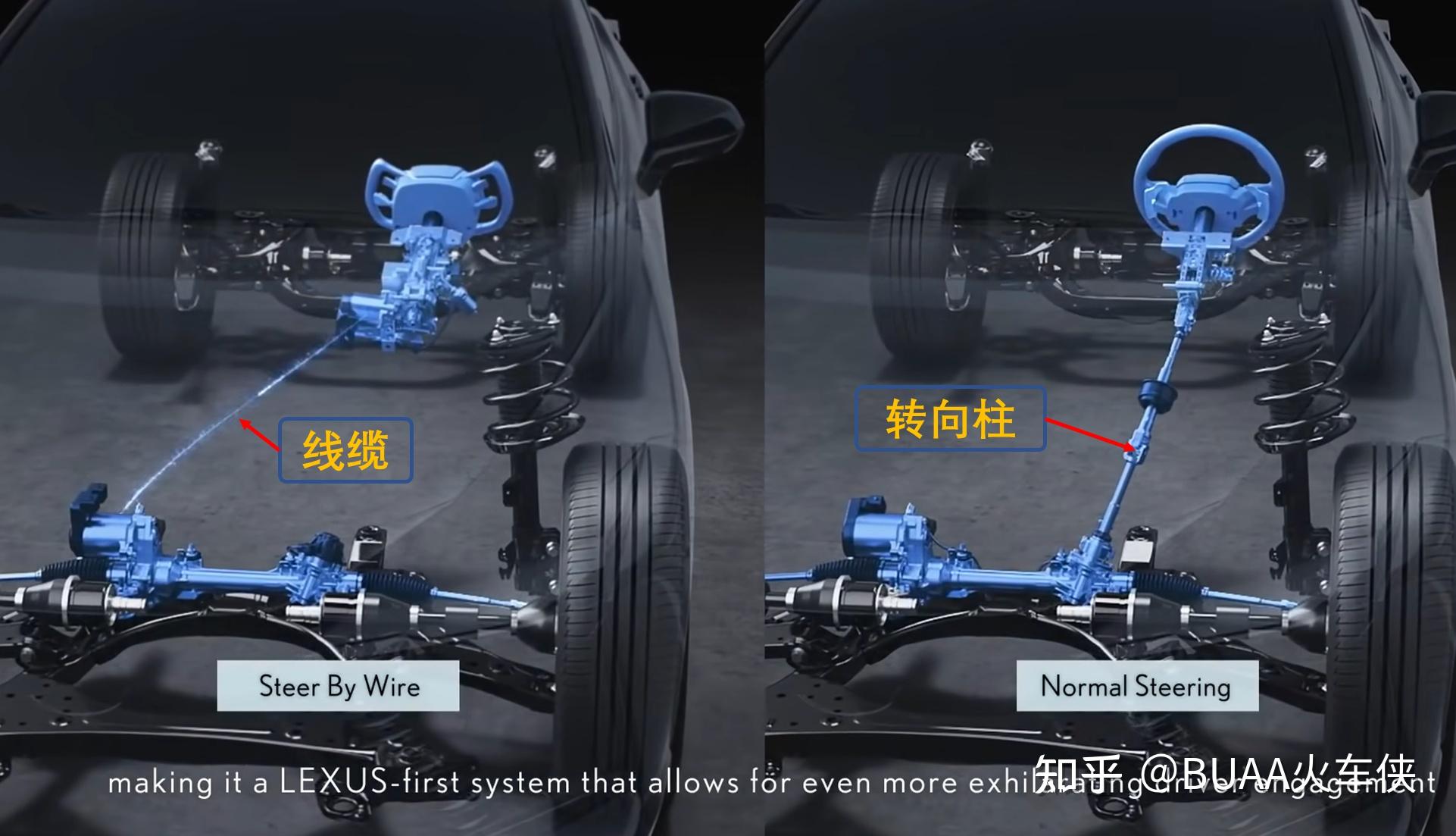 线控转向与电子助力转向的对比,来自Lexus这种更为彻底的线控转向的优点有:去掉转向柱使得转向机构的布置更为灵活;由于方向盘与执行机构不存在机械连接,因此可以利用程序实现不同的转向比,甚至实现非线性的转向比,以实现个性化的驾驶需求(例如,在转向角较大时可适当降低转向比,使得低速状态下能够更轻松地掉头);通过与方向盘相连的转向模拟器,可以更自由地调节转向阻尼,实现个性化的转向手感;前面提到“高速行驶下大幅度转向会导致翻车”,而采用线控转向,系统可以抑制人类的可能导致车辆失控的操作。线控转向地缺点是: 线控转向与电子助力转向的对比,来自Lexus这种更为彻底的线控转向的优点有:去掉转向柱使得转向机构的布置更为灵活;由于方向盘与执行机构不存在机械连接,因此可以利用程序实现不同的转向比,甚至实现非线性的转向比,以实现个性化的驾驶需求(例如,在转向角较大时可适当降低转向比,使得低速状态下能够更轻松地掉头);通过与方向盘相连的转向模拟器,可以更自由地调节转向阻尼,实现个性化的转向手感;前面提到“高速行驶下大幅度转向会导致翻车”,而采用线控转向,系统可以抑制人类的可能导致车辆失控的操作。线控转向地缺点是: 如同EMB缺少可靠的备份,线控转向取消了方向盘输入与转向输出之间的机械连接,一旦线控系统失效,则无法通过人工补救。因此需要额外设计转向备份系统。 笔者个人的看法是:现阶段并不一定要采用完全的线控转向。首先,EPS通过电机已经足够实现ADAS/AD系统对转向的精确控制,取消转向柱并不会在这一点上有多大提升。而取消机械连接带来的风险却是实打实的。当然,如果在未来L5级自动驾驶实现后,车辆已经完全不需要方向盘,那个时候自然可以采用纯粹的线控转向了。 线控转向Ref: 【熟肉】线控转向是如何工作的-新款雷克萨斯RZ450e_哔哩哔哩_bilibili(推荐观看)本章Ref: 汽车转向系统,它是如何实现转向和助力转向的?_哔哩哔哩_bilibili(推荐观看)Power steering - Wikipedia国家标准全文阅读|标准检索 (samr.gov.cn)GB17675《汽车转向系》4. 线控油门 4.1 油门的控制对象自动驾驶中,我们想要控制的具体对象是什么?答案是车速 v 和加速度 a 。而对于动力系统,具体的输出又是什么?答案是功率 P ,进一步说是转速 n 和扭矩 T ,有 P=n \times T/9550。 在车辆不发生打滑的情况下,转速 n 可以等比转换为车速 v ;而加速度 a 则是由发动机扭矩 T 形成的牵引力 F_{tow} 、风阻 F_{air} 、地面摩擦力 F_{ground} 、传动系统摩擦力 F_{trans} 等共同作用决定。其中,一般情况下风阻与车速的平方成正比 F_{air} \propto v^2 ;而在汽车设计中,一般会通过空气动力学设计,将风阻转化为一部分下压力来提升高速稳定性,这会导致车轮与地面的接触面积增大,进而导致摩擦力增大;最后,传动系统的损耗也会随着转速的增大而有所增大。 上述是一个简化整车动力学模型,实际的模型十分复杂,其特性需要经过大量实验才能得到。  最简单的整车的力学模型 4.2 电动机 最简单的整车的力学模型 4.2 电动机先放出一张电动车动力传输路径图:  电动车、增程混动的动力输出路径 电动车、增程混动的动力输出路径电动车的动力输出路径是最简单的,其一开始就是纯粹的线控系统:当人踩下油门踏板后,ECU采集到踏板行程,之后控制功率半导体输出PWM波,驱动电动机输出功率,这一过程理论上可以做到没有任何延迟。顺带一提,增程式混动的动力输出路线与电动车一致,内燃机不会连接到动力输出轴上,仅仅作为一个发电机在电池馈电时启动,对电池进行充电。 电动机的扭矩-转速-功率曲线如下图,其特点是从一开始即可以输出最大的扭矩,当功率达峰后随着速度的增大而减小。如果安装了变速箱的话,曲线会随着换挡逻辑有所变化。但目前除了保时捷Taycan等少数电动车会配备二档变速箱,一般电动车都仅连接单级减速器。  电动机扭矩-转速-功率曲线 电动机扭矩-转速-功率曲线 正因如此,电动车的前半段加速过程十分线性,在不打滑的情况下,加速度值能够维持在基本恒定。如下图Tesla model3仅用0.14s即可达到最大加速度,并维持恒定。  Tesla model 3的加速曲线 4.3 内燃机 Tesla model 3的加速曲线 4.3 内燃机 燃油车的动力传输路径要复杂许多,但本质上是通过控制节气门开度和喷油量来控制发动机的输出功率。古老的化油器时代就不讲了,我们直接从电子喷油时代讲起,可以分为两个阶段: 一开始,油门踏板通过一根拉线与节气门相连,当踩下油门踏板后,节气门的开合度发生变化。同时,节气门上安装的空气流量传感器可以检测到此时的进气量,并将该信号传递给ECU,ECU根据当前的车速,以及油门信号的大小确定喷油量。空气和燃油在气缸内混合燃烧,输出动力。通过各种变速箱,如手动MT、自动AT、双离合DSG、无级变速CVT等,对扭矩和转速进行一定范围内的调节。 采用该种方法,喷油量与进气量的匹配不是很准确,造成汽车油耗较大,因此目前出厂的车辆都采用了电子节气门的设计。踩下油门踏板后,将位置信息传递给ECU,由ECU同时控制节气门和喷油嘴,剩余过程与之前一样。  拉线节气门(上)、电子节气门(下) 拉线节气门(上)、电子节气门(下) 节气门 节气门内燃机非常重要的一个特点是:“踩下油门”与“爆发动力”之间是存在一个延迟的,一般而言电子油门迟滞可达0.5s~1s。如果考虑涡轮迟滞效应(涡轮需要发动机达到一定转速之后才能启动,进而提升发动机的动力),那么燃油机的动力输出响应则更慢。 内燃机的转速-扭矩-功率曲线如下图所示,其最大特点是:一开始并不能输出最大扭矩,只有当转速上升到一定阈值才使加速度达到峰值。尽管业界一直在努力降低这一阈值,但目前仍然需要1500-2000转左右。 结合上述两种因素,就使得内燃机的初段加速性能比不上电动车:20万左右0-100加速5秒左右的电动车十分常见,但燃油车要达到此性能则一般需要40-50万元以上。不过,内燃机的中段和后段加速性能要强于电动车。其一是因为一般地内燃机输出功率更大,其二是因为内燃机配备了变速箱(比如Taycan配备两级变速箱后使得中后段的加速能力大大增强)。  内燃机转速-转矩-功率曲线 内燃机转速-转矩-功率曲线但是,也正是由于变速箱存在不同的挡位,以及换挡间隙,这使得燃油车的加速度存在一定浮动,加速不够线性。如下图的大众迈腾的加速过程就不如前面model3那么线性,呈现出一种顿挫感。  内燃机的速度-加速度曲线,一般在加速度曲线交界处执行换挡 内燃机的速度-加速度曲线,一般在加速度曲线交界处执行换挡 迈腾380TSI加速曲线,可清晰看到换挡带来的加速顿挫 迈腾380TSI加速曲线,可清晰看到换挡带来的加速顿挫Ref: 为什么汽车的节气门一定要由电脑来控制? - 知乎 (zhihu.com)4.4 混动车 对于混合动力Hybrid车辆,动力输出的情况会更加复杂一些。首先混动系统大致有以下几种: 串联式混动系统(增程混动):代表是理想汽车,最简单;2. 并联式混动系统:本田iMMD、比亚迪DMI、吉利雷神DHT、长城拿铁DHT等; 3. 混联式混动系统:主要就是丰田THS。 前面已经讲到,增程混动的动力输出与电动车类似,而并联式混动和混联式混动的动力输出基本可以参照下图,其差异更多体现在不同工况下动力连接策略的不同。Hybrid系统一般是没有变速箱的,内燃机连接一级减速器,因此不需要考虑变速箱的影响。(所谓“多挡”的DHT混动一般也是采用离合器达成,并非采用传统意义的变速箱来换挡)  非增程混动的动力传输 非增程混动的动力传输主流混动系统的原理可以参考以下视频,讲解的非常到位: 在混动系统中,电动机很好的补足了燃油机初段低扭的缺点。并且,在高速阶段,如本田iMMD、比亚迪DMI都可以讲发动机直连到动力输出轴上,获得很好的中后段加速能力。 PS:目前大电池PHEV混动的系统动力输出策略是可以玩的非常花的。例如:比亚迪DMI系统正常起步下是由电机带动的,而当弹射起步时候,双模电机配合内燃机共同启动,可以爆发出接近600匹的动力,0-100km加速只需要4.5s左右。再比如,电池电量充足时候可以当成纯电车来驾驶,电池馈电时候则可以采取混动策略。 最后说回加速曲线,混动车辆的加速曲线与电动车类似,比较线性,加速度的波动较小。  丰田卡罗拉混动加速曲线4.5 油门的标定 丰田卡罗拉混动加速曲线4.5 油门的标定 综合以上的内容,我们引出了油门的标定。通俗讲,就是通过大量实验获知 “不同的油门深度下,会获得什么样的 v,a 曲线”,最后可以形成一个三维曲面,这就是所谓的“油门标定表”。然后结合该表对发动机动力输出进行优化,使得标定表曲面更为平滑,或者更符合人的驾驶习惯,以达成更好的NVH效果。其实刹车也是同理,利用相似的方式也可以得到一个刹车标定表。  油门标定表,来自B站up主“忠厚老实的老王” 油门标定表,来自B站up主“忠厚老实的老王”那么,回到本章开头的问题。当自动驾驶系统要控制车速和加速度时候,仅需要根据油门标定表的数据匹配油门深度即可。这对于纯电车、燃油车、以及混动车而言都是一样的,仅需采用传统的PID算法,就可以得到非常不错的控制效果了。 由于电动车和混动车有着更为平滑的动力输出特性和快速响应特性,必定是比燃油车更加容易控制的。 Ref: 【基础】自动驾驶控制算法第十讲 油门刹车标定表的制作_哔哩哔哩_bilibili(推荐观看整个教程,质量极高)5. 线控悬架 5.1 线控悬架与自动驾驶所谓“悬架”,指的是车轮和车身之间连接装置的总称。常见悬挂的类型有扭力梁、麦弗逊、双叉臂、多连杆等,除了扭力梁是非独立悬挂,其他的都是独立悬挂。感兴趣的可以参考下方视频,不再赘述。  常见的悬挂种类,来自B站,11磅小老虎,推荐关注 常见的悬挂种类,来自B站,11磅小老虎,推荐关注但本节讨论的重点是悬架的力学模型,它其实就是一个二阶质量-弹簧-阻尼系统,学过《机械振动学》的读者应该会有映像。弹簧和阻尼器可以起到支撑车身、过滤路面震动的作用,可以达成更好的驾驶品质和NVH效果。 被动悬架:对于大部分的中低端车型,多采用并联的螺旋弹簧和液压减振器,这种形式的减震装置相当常见,在摩托车、汽车、乃至火车上都会用到。其物理模型可以抽象为车身与轮胎之间存在一个弹簧和阻尼,然后车轮与地面间也存在一个“弹簧”(车轮也有一定的弹性)。此种悬架的弹簧刚度 k_2 和减震阻尼特性 c 在出厂后都是无法更改的,悬架的高度也无法更改,因此我们称其为“被动式悬架”。 PS:所谓“悬挂调教”,更多的就是出厂前对弹簧刚度和阻尼曲线的设定:偏运动的车辆刚度和阻尼都更大,驾乘感受偏“硬”,弯道极限更高,而偏家用的车辆刚度和阻尼都更小,驾乘感受偏“软”,不适用于激烈驾驶。德系车的调教偏“韧”,日系车的调教偏“软”,这些都是通过悬架系统塑造的不同的风格。  悬架的力学模型主动悬架: 悬架的力学模型主动悬架:在ECU的控制下,弹簧刚度 k_2 、阻尼系数 c 、以及悬架高度 h 都是精确可调的,这也就是所谓的主动悬架,或者线控悬架,具体的实现方式后面会讲。一些文章还根据可调节对象的多少将其分为“半主动”和“主动”,这里我就一律将可调节的算作“主动”。 那么线控悬架又如何与自动驾驶扯上关系呢?简而言之——改变车辆的动力学特性。下面列举几个典型场景: A. 熟悉汽车操控性评价的应该都听过绕锥桶的麋鹿测试(moose test),其目的是为了测试汽车在高速时作出S转向的性能。一般地,悬架刚度更高的车辆能够以更高的速度过弯,而刚度较低的车辆极限较低,甚至在速度过快时会导致翻车。  紧急转向时即将侧翻的SUV 紧急转向时即将侧翻的SUV显然,当车辆行驶在弯道较多的道路上,或者需要紧急转向避让时,线控悬架可以提升其刚度,抬高外侧悬架,降低内侧悬架,这些措施都可以保障车辆不失控(在这种情况下,前面提到的ESC刹车系统也会发挥重要作用),这也与最终的决策高度相关。 B. 如果路面存在沟坎,那么通过激光雷达或者摄像头可进行感知。然后相应地调整悬架刚度,提升驾乘感受,保护悬架系统。  通过沟坎 通过沟坎C. 大油门起步会车辆会“抬头”,大脚刹车车辆又会“点头”,这些情况都可以通过控制悬架刚度和高度来解决。这都可以提升轮胎抓地力,起步时防止打滑,制动时缩短距离。 D. 由于车门的强度一般比较低,因此侧碰一般是碰撞事故中最为凶险的一种,奥迪A8就通过侧面摄像头感知来自侧面地碰撞,抬高碰撞一侧的悬架,让强度更高的底盘承受撞击,从而保障乘员安全。  Audi侧碰优化 Audi侧碰优化E. 抬高悬架高度,可以提升车辆通过性,走一些烂路时候不会拖底。 F. 扯点更远的,奔驰的M-ABC系统可以极快的速度抬高/降低车身,使车辆在地上“跳舞”,这对于非铺装路面的脱困是一项利器,可以省一笔拖车费用。因此,线控悬架之于自动驾驶,绝非花拳绣腿,车辆动力学也是自动驾驶无法忽视的点。 Ref: 麋鹿测试_百度百科 (baidu.com)BarS-目前汽车有哪些先进的悬挂技术呢? - 知乎 (zhihu.com)下面来写线控悬架的实现方式:可变刚度弹簧、可变阻尼减震器以及可调稳定杆。 这部分内容相对简略,大体了解原理即可。 5.2 可变刚度的弹簧目前,可变刚度弹簧的实现方式主要是“空气弹簧”,有膜式和囊式两种结构,在密闭的压力缸内充入惰性气体或者油气混合物,通过空气泵打入气体即可实现对悬架刚度和高度的调节。 并不难看出空气弹簧的一些特点:由于采用空气介质,充气过程相对缓慢,因此刚度和高度的调节响应速度不快,很难做到瞬时响应;高压气体使得充放气口很容易失效,因此寿命一般也都比较短。我上学时特别爱看英国修车节目《Wheeler Dealer翻新老爷车》,他们维修的车辆里,只要带空悬的,几乎就没有不出问题的  《Wheeler Dealer》 《Wheeler Dealer》当然,采用空气弹簧并不意味着完全弃用机械弹簧,很多空悬系统也都在内部集成了传统的弹簧。  膜式空气弹簧(左)与空气弹簧+阻尼器总成(右) 膜式空气弹簧(左)与空气弹簧+阻尼器总成(右) Audi Q5空气悬挂系统 Audi Q5空气悬挂系统另外,一般采用集中式的一套气泵和储气罐驱动四个气缸,通过阀体来分配充气量。给每个车轮单独分配气泵和储气罐体积上不允许,同时也不经济。  空气悬架的架构图5.3 可变阻尼减振器 空气悬架的架构图5.3 可变阻尼减振器 3.3.1 普通的液压减振器 首先介绍普通的液压减震器,其原理十分简单:当活塞向下运动时候活塞下方的液压油受到挤压,从活塞的开口流入活塞上方,从进油阀流入储油筒;活塞向上运动时,液压油从活塞上方流入活塞下方,同时储油筒中的液压油经进油阀流入活塞下方。 液压油通过小孔和进油阀时会产生阻力,将动能转化为内能耗散。流量一定时,通道截面积的大小与流体的阻力成反比。实际的阀体设计十分复杂,通过对多个阀体的人工调节,会构造出一条“阻尼曲线”,从而影响车辆的驾乘感受。  液压减震器结构图 液压减震器结构图具体原理可参考以下视频: 3.3.2 筒间流量调节减振器 CDC Continuous Damping Control CDC的原理非常简单:使用电磁阀改变液压油通道的大小,就可以改变阻尼系数。这就像我们玩注射器时,带着针头推注射器阻力更大,不带针头阻力更小一样。  CF-Sachs CDC结构与原理 CF-Sachs CDC结构与原理CDC的调节速度适中,成本不高,且寿命较长,因此使用非常广泛。最大的供应商一般是德国的采埃孚-萨克斯ZF-Sachs,比亚迪自研的FSD减震器原理基本类似。 Ref: ZF cdc damping system - YouTube浅显易懂的CDC减震系统解析 (baidu.com)3.3.3 主动电磁感应悬挂系统 MRC Magnetic Ride Control MRC并不改变液压油通道的大小,而是通过改变液压油的粘度来控制其流动速度。MRC使用的液压油加入了磁性物质,并且减振器中安装了电磁线圈。当线圈通电时,液压油分子根据磁场方向规律排布,导致粘度增大,因此在缸体中的流速变低,减振器的阻尼增大;并且这个阻尼增大的程度是可以通过电流的大小来进行控制的。 与CDC相比,电磁液压油粘度变化的速度要远快于电磁阀的开闭速度,因此MRC的悬架刚度调节响应可以达到1ms以内,其调节范围也更大一些。MRC最显著的缺点就是贵,当然这不是MRC的问题,是我的问题。MRC主要的供应商是美国的德尔福Delphi,也因此MRC最先用在美系车上。  MRC基本原理,液压油分子受磁场影响有序排列 MRC基本原理,液压油分子受磁场影响有序排列咬文嚼字:我们经常听到“空气悬挂”和“电磁悬挂”两个概念,其实这两个概念的类比并不合适。空气悬挂主要改变的是的是弹簧刚度,而电磁悬挂改变的是阻尼系数。很多文章还煞有介事的对比其不同点,事实上,空气弹簧和电磁悬挂完全可以结合起来使用。 Ref: MRC主动电磁感应悬挂系统_百度百科 (baidu.com)The Magnetic Shock Absorber Idea with Regenerative Power (1080 px) - YouTube(MRC工作视频,推荐观看)3.3.4 奔驰的主动车身控制 ABC Active Body Control 奔驰采用的悬架方案与前面又不一样,其原理是通过电子液压泵,给阻尼器中泵入液压油,推动阻尼器活塞的上下移动。从而实现车身高度的调节。根据出现的时间,可以分为M-ABC和E-ABC系统。  奔驰ABC主动车身控制系统 奔驰ABC主动车身控制系统其中M-ABC是通过一个中央泵+阀体来来控制四个车轮上的悬架,而E-ABC则是在四个车轮侧各配备一个电子液压泵驱动来阻尼器,其架构有点类似于之前讲过的电子机械刹车EMB。 M-ABC的特性与EMB也十分相似,首先由电机带动阻尼器,其响应时间十分快,可以在1秒内实现车身高度的升降,这要比空气弹簧迅速的多。 因此,奔驰可以做出原地“起伏跳舞”这种匪夷所思的动作,参考下方视频: 同时,四个液压泵需要支撑起上吨的重量,因此其需要很大的功率,且其位于车轮侧的工作环境非常恶劣,其面临的难题某种程度上与EMB电子机械刹车是类似的,实现难度都非常大。因此,目前E-ABC系统仅在旗舰级车型上配备。 5.4 一些客观现实工业产品的铁律就是:越是复杂的结构,其故障率就越高。可调刚度、阻尼的悬架已经出现了20多年,其故障率一直居高不下,寿命一直很难撑过汽车的整个生命周期。并且此类悬架在行车过程钟出现故障,很可能引发车身姿态的剧烈变化,从而导致重大事故。前些时的理想L8空悬在碰到地面凹坑时爆裂即是一个很好的案例。线控悬架增加了电机\液压泵、控制器、传感器、储气罐等配置,重量和能耗都会有所提升;Ref: (22) With E-Active Body Control ( Mercedes-Benz ) - YouTube(奔驰ABC系统); 6. 参考资料Ref: 线控悬架系统分析 - 知乎 (zhihu.com)电子控制悬架系统_百度百科 (baidu.com)【工程师聊悬架1】汽车悬架专业解读,建模仿真模拟实车带你带你读懂汽车悬架。_哔哩哔哩_bilibili悬挂形式有哪些,哪种好,有什么区别? 【纸上谈车10】_哔哩哔哩_bilibili目前汽车有哪些先进的悬挂技术呢? - 知乎 (zhihu.com)(推荐阅读)BarS - 知乎 (zhihu.com)(推荐关注,线控悬架系统的大佬) |
【本文地址】
今日新闻 |
推荐新闻 |