|
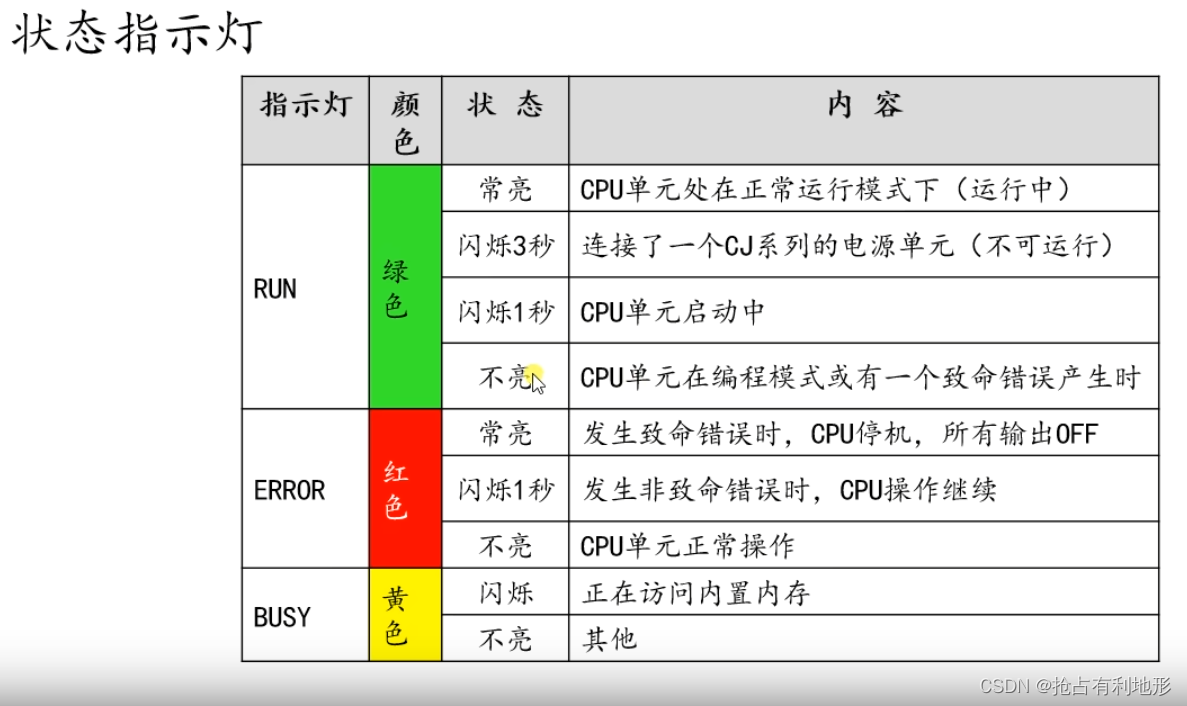
1.指示灯
  SD卡旁边有个按钮,按下按钮之后SD卡断电,并且需要取出SD卡重新安装或者断电重启 plc 才能上电。 SD卡旁边有个按钮,按下按钮之后SD卡断电,并且需要取出SD卡重新安装或者断电重启 plc 才能上电。
2.电源模块
电源模块和 plc 是可以分开的 这是电源模块  这是 plc 这是 plc 
NJ-PA3001,NJ-PD3001供电电压不一样。 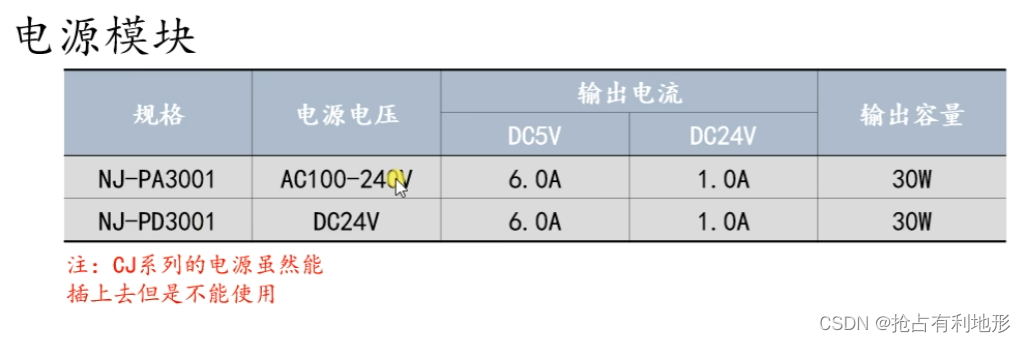 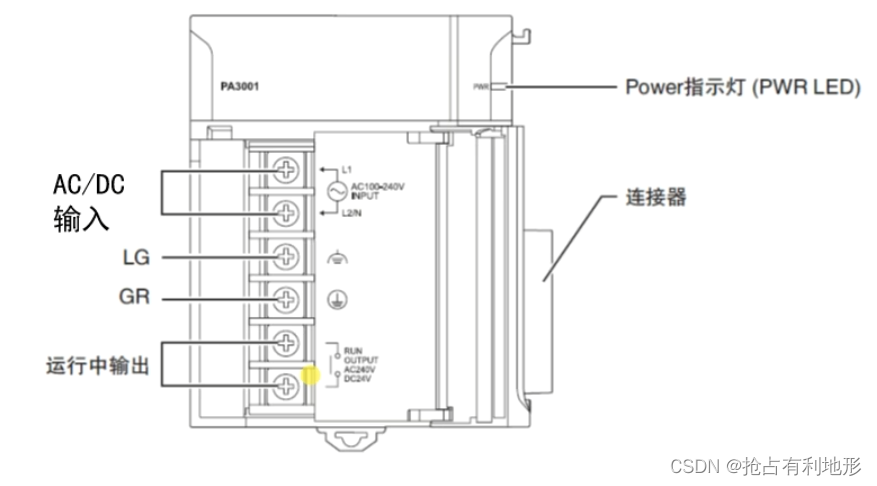 LG和GR是接地,LG是三类接地(独立接地),主要是防止干扰和电击。 GR也是第三类接地(独立接地),作用是防止触电。 LG和GR是接地,LG是三类接地(独立接地),主要是防止干扰和电击。 GR也是第三类接地(独立接地),作用是防止触电。
3.SD卡
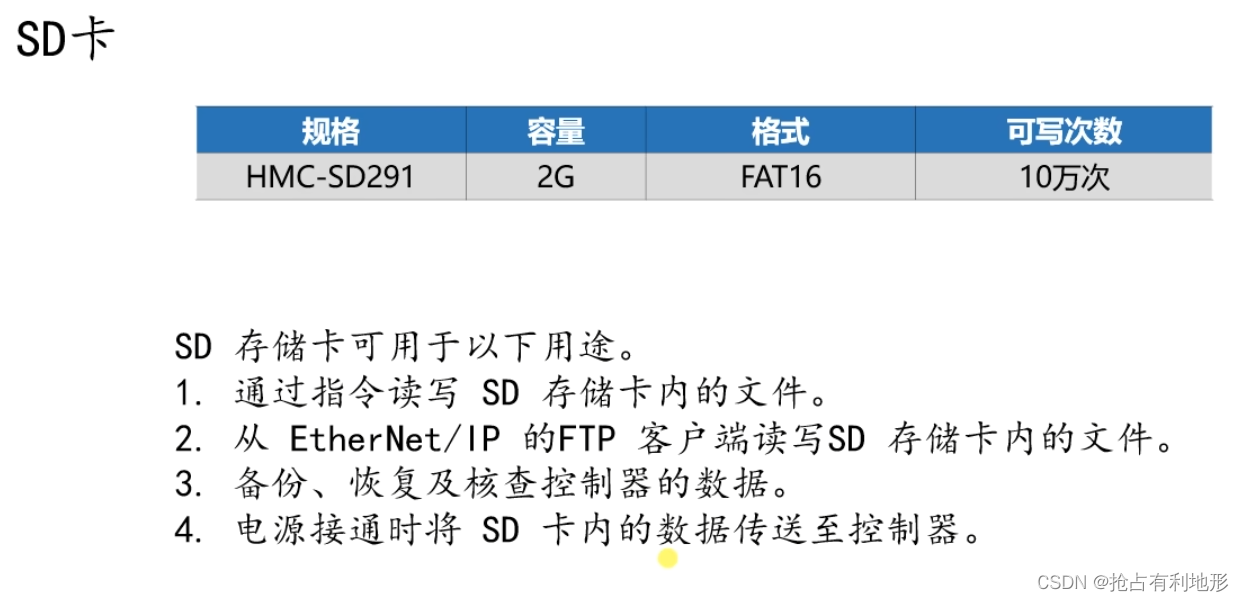 Sysmac Studio 在线后可将SD卡中的文件复制出来。 Sysmac Studio 在线后可将SD卡中的文件复制出来。
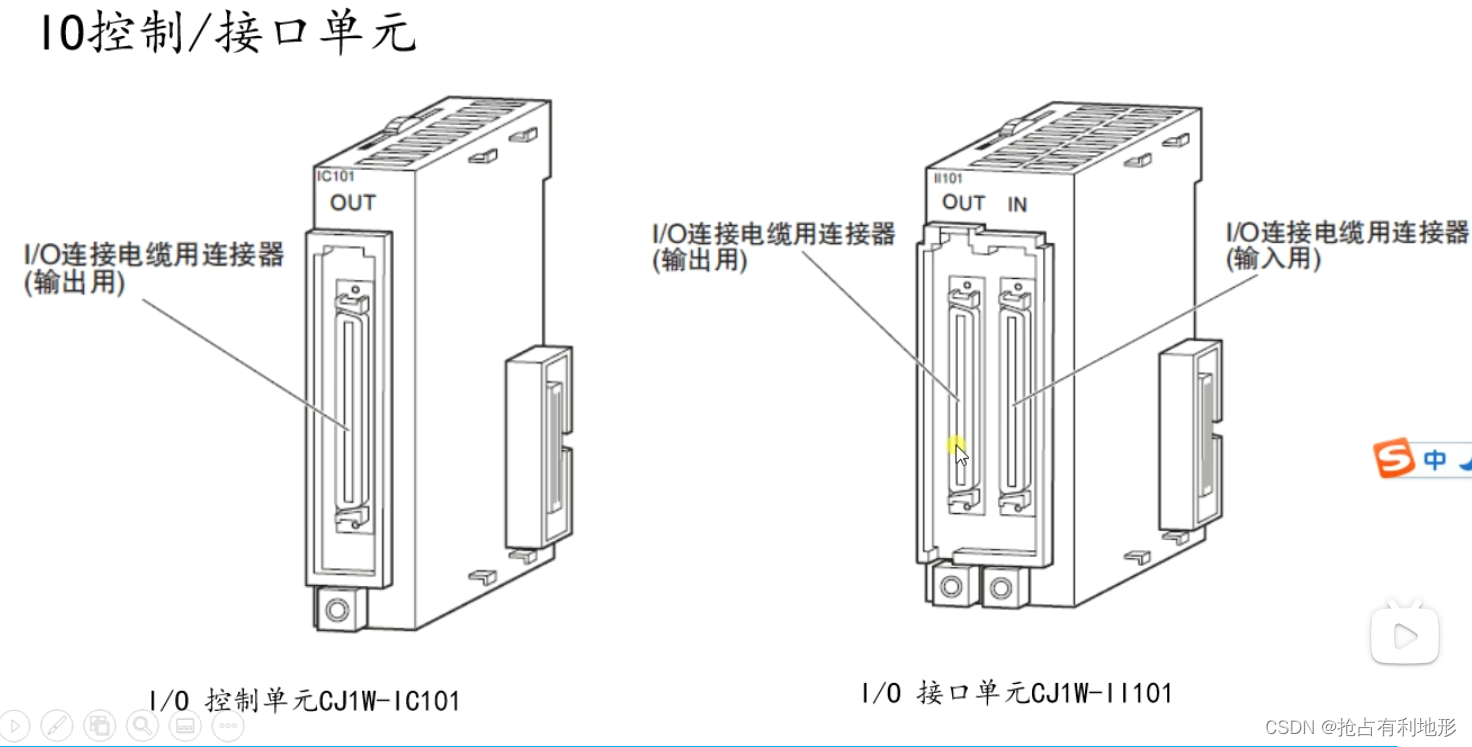
4.本地扩展
IO控制/接口单元。 IO模块可接在 plc 的后面 
 电缆长度有限制,加起来不能超过12m。 电缆长度有限制,加起来不能超过12m。 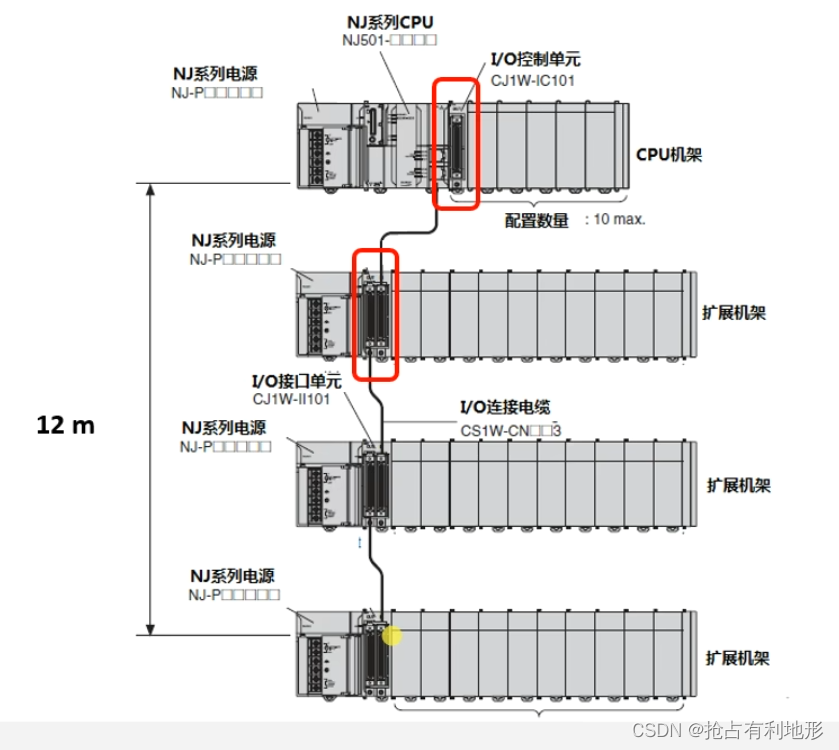 连接电缆 连接电缆 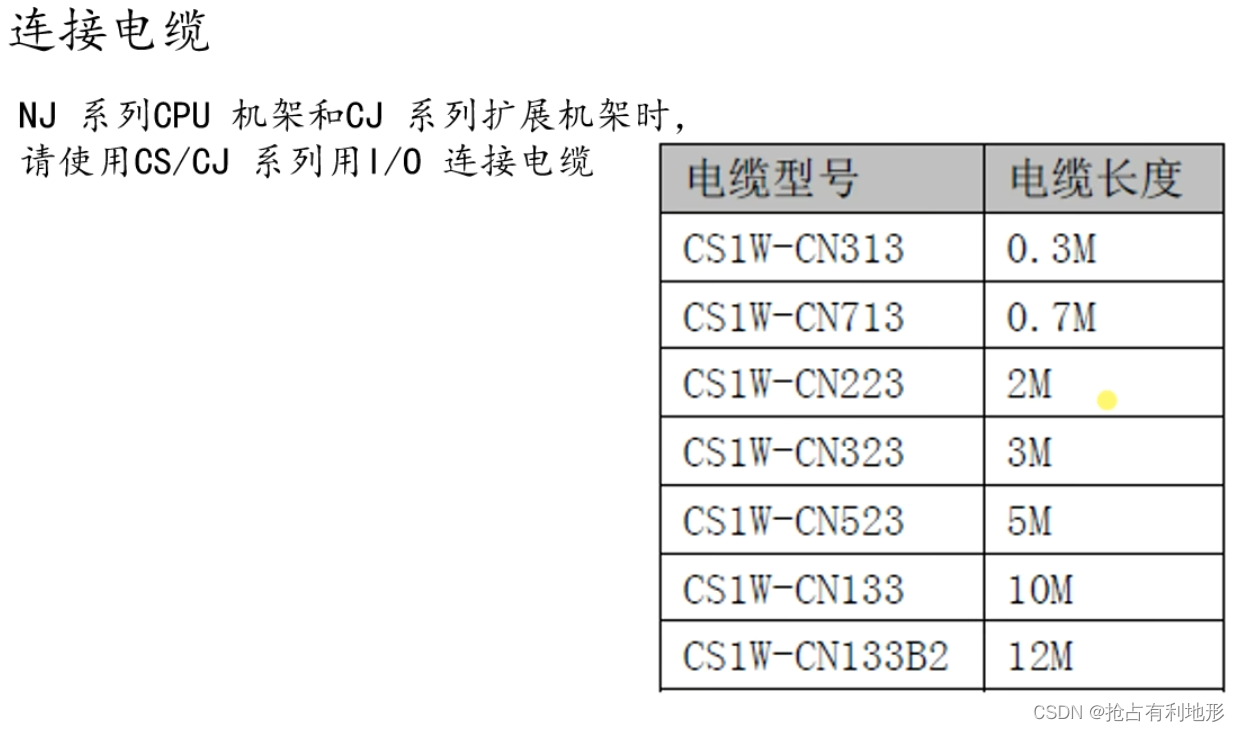
5.编程
5.3.变量
变量的内存地址默认自动分配,以实现内存最优化使用。也可以指定内存。内部变量都是独立的,不同POU内的内部变量可以重名。硬件变量都是全局变量。变量可以设定初始值,可设定为常量,可设置掉电保持。 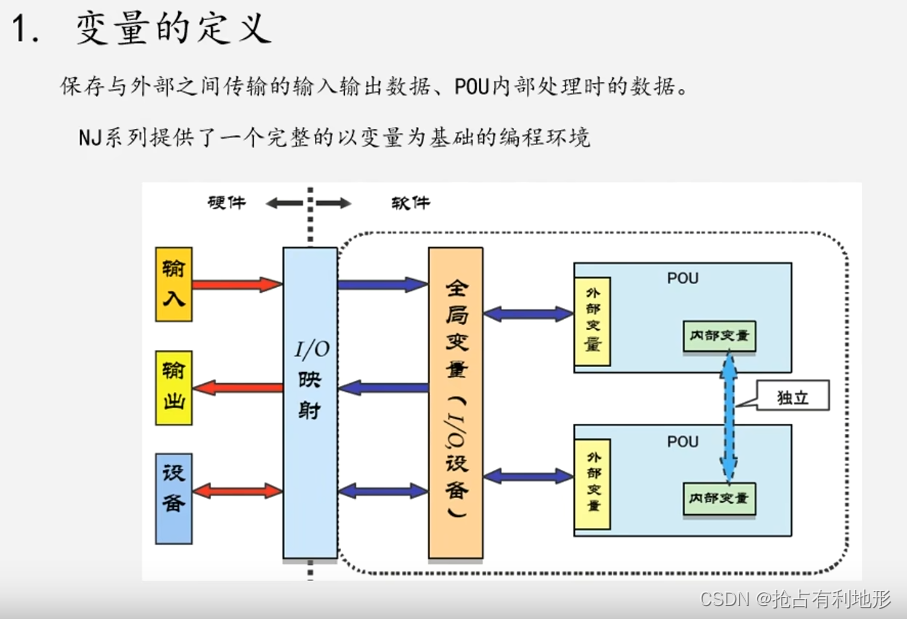 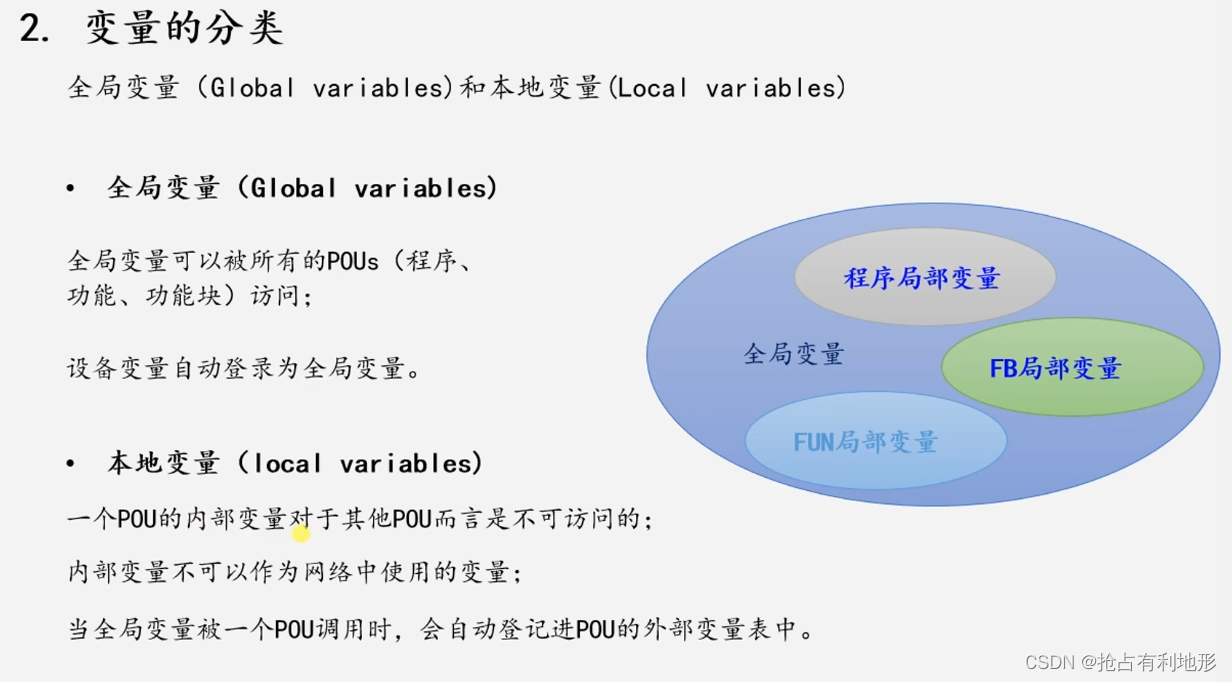 变量的命名 变量的命名 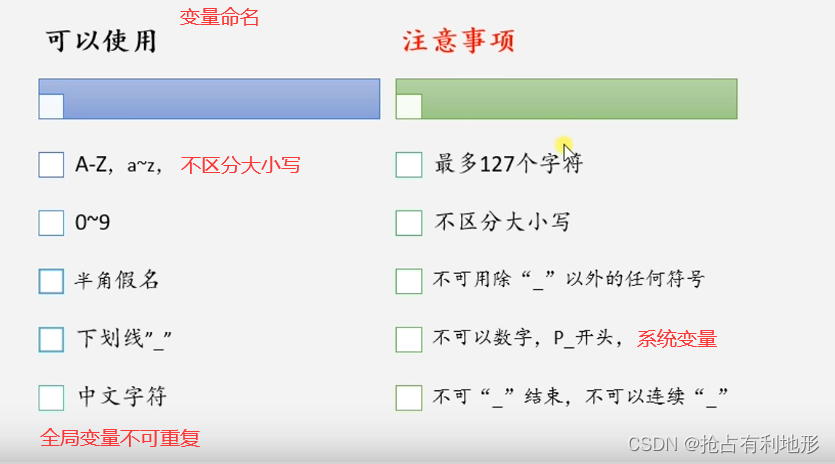 5.4.数据类型
5.4.数据类型
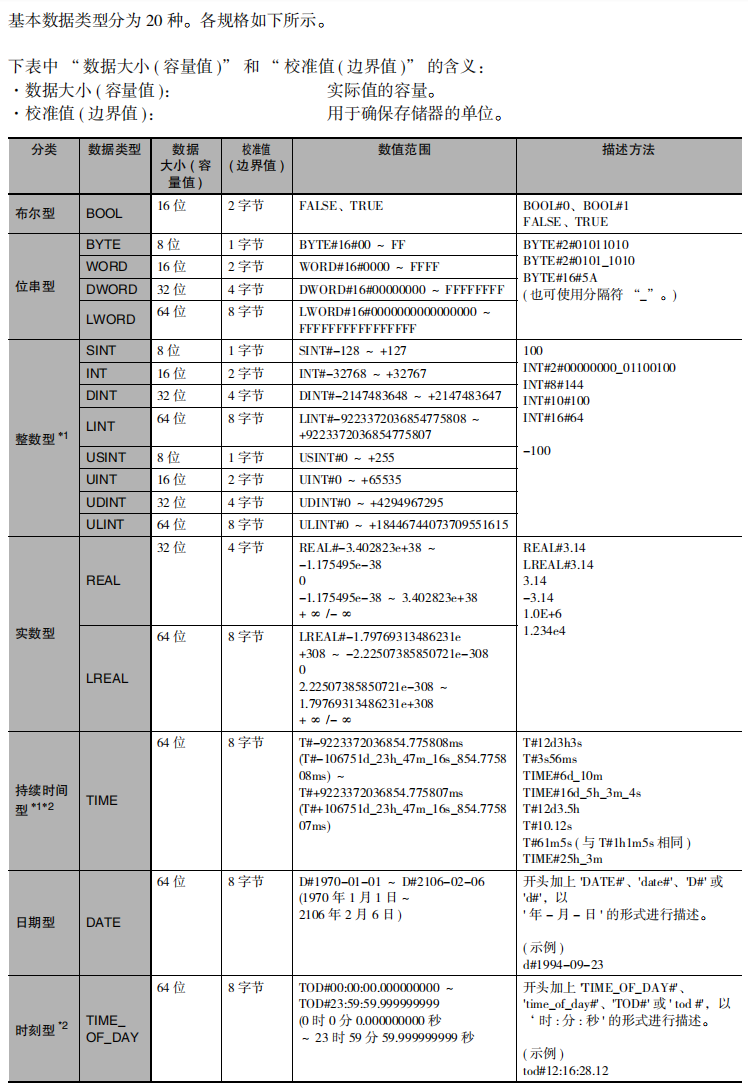
数组 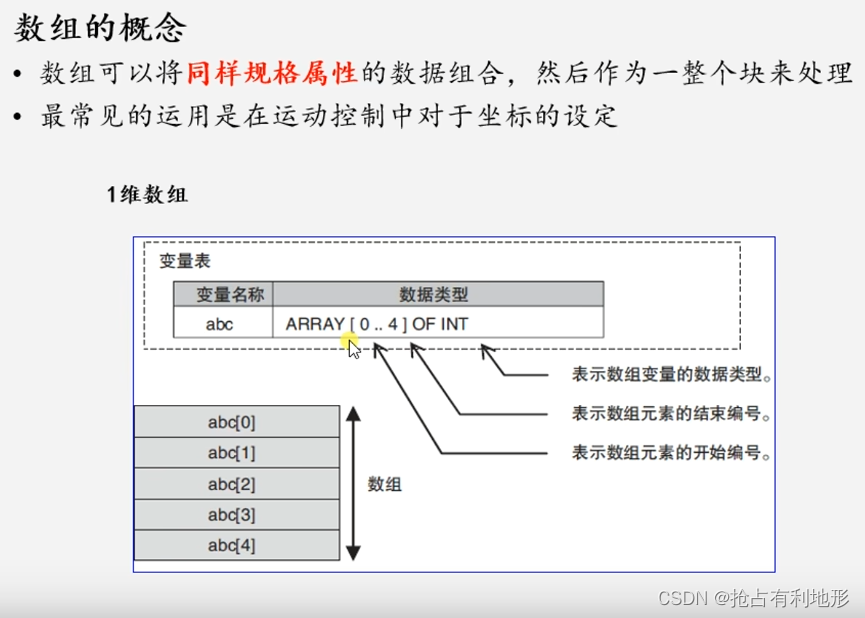 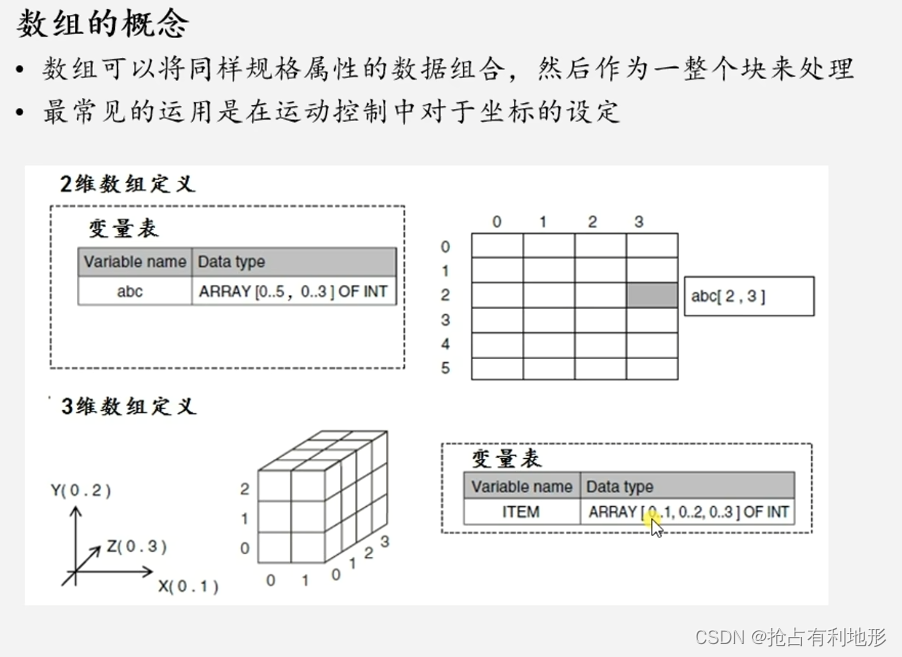 结构体 结构体可以嵌套,最多八层。 结构体 结构体可以嵌套,最多八层。 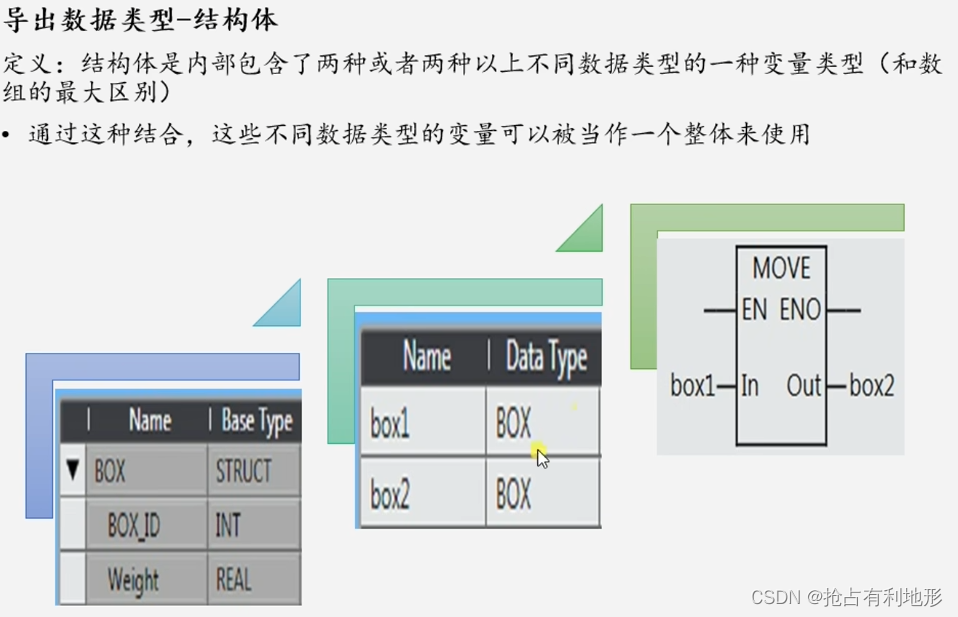 联合体 联合体 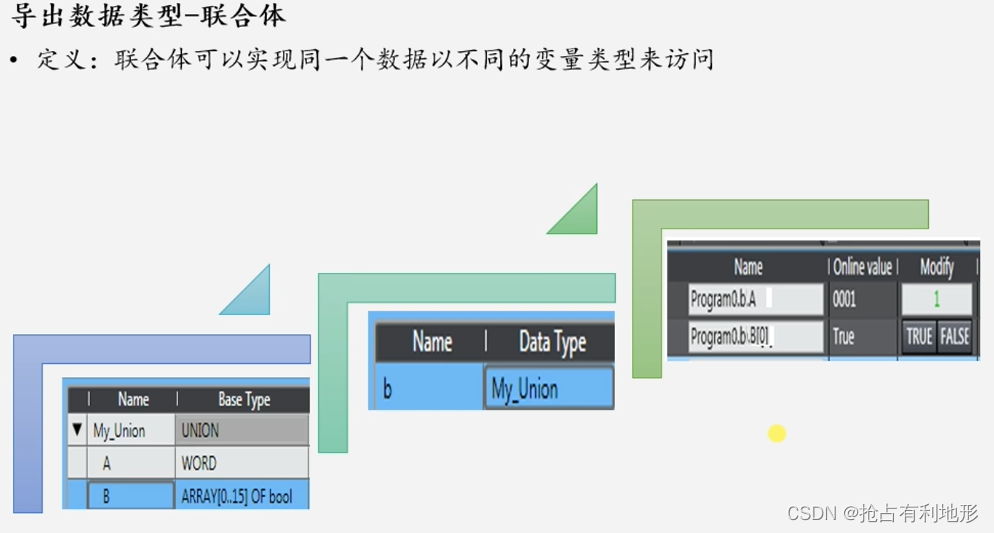 枚举体 枚举体 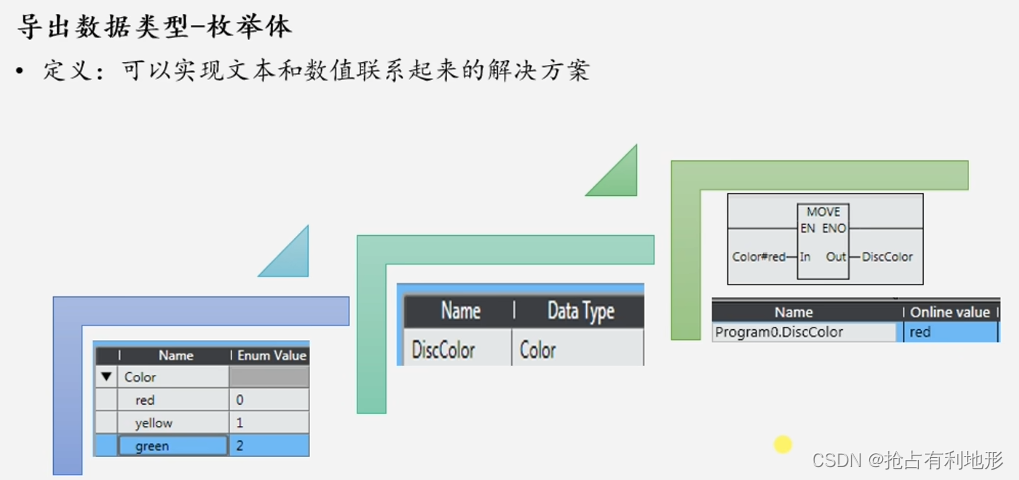 例 例 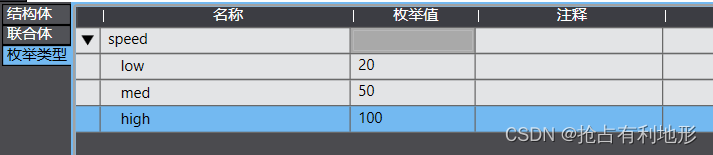 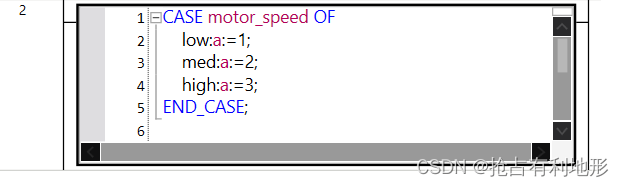
6.任务
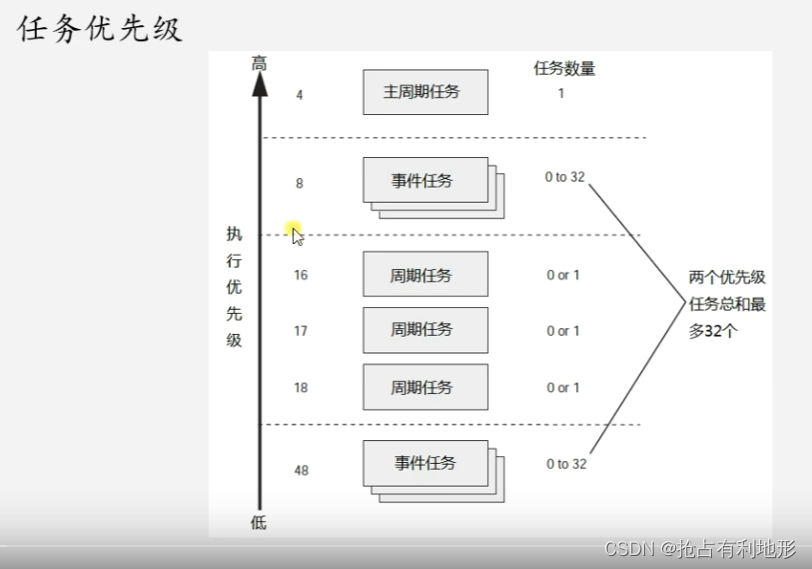
6.1.任务优先级
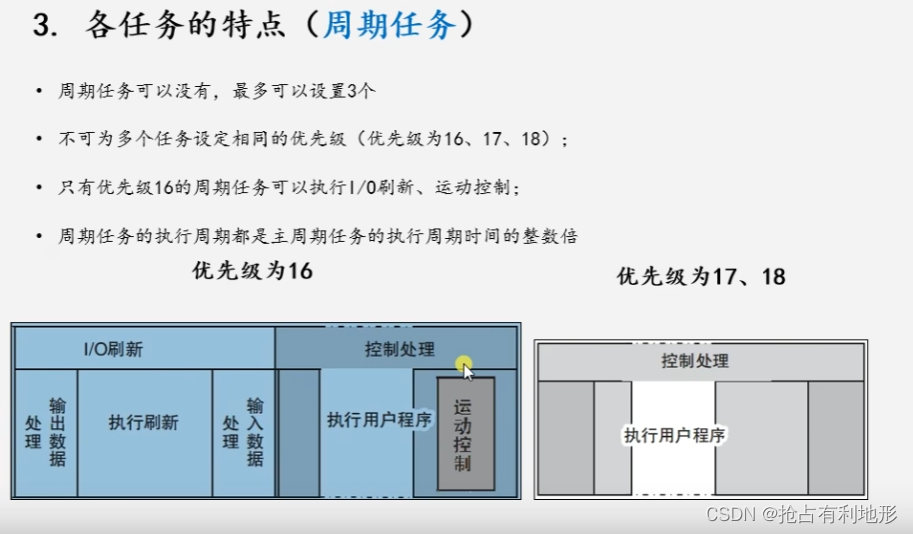
6.3.周期任务
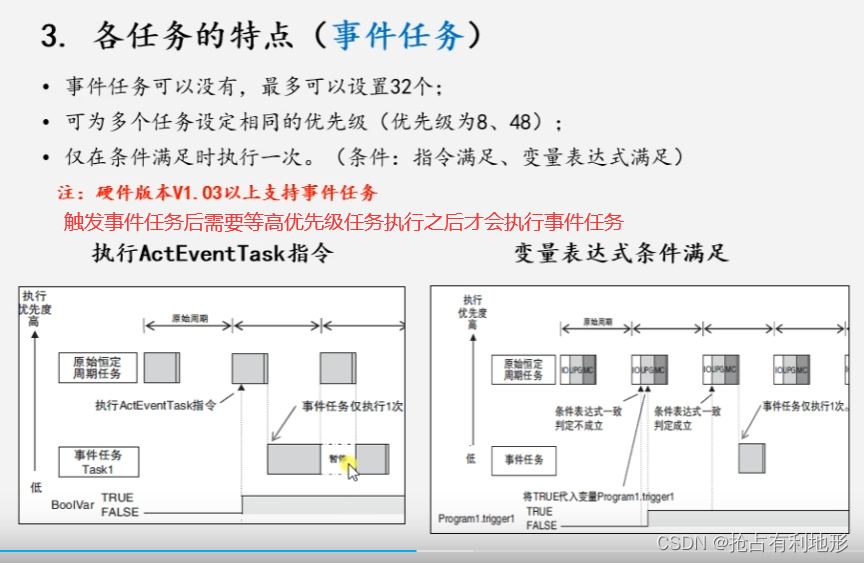
6.4.事件任务
7.sysmacstudio软件介绍
8.逻辑编程规则(梯形图)
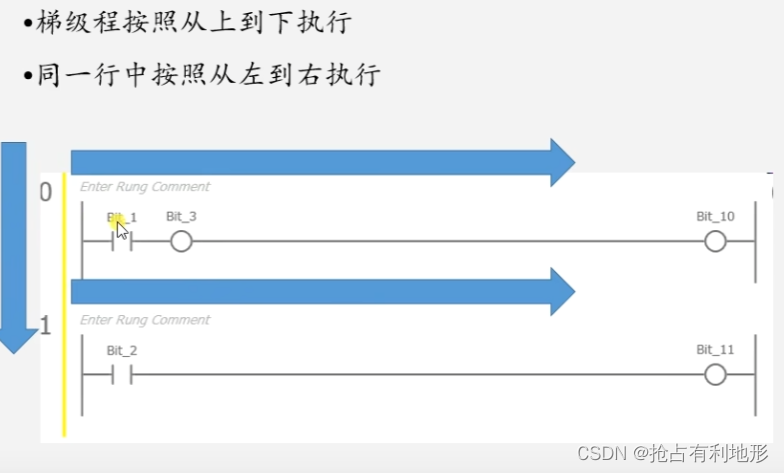
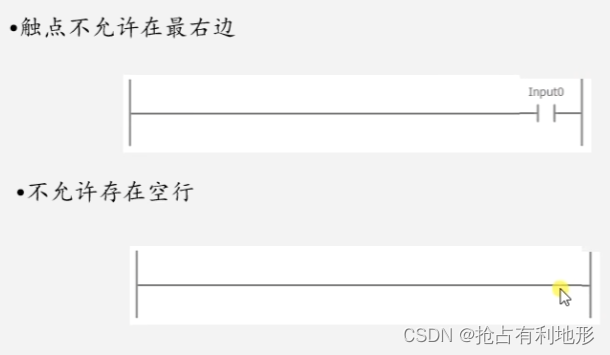
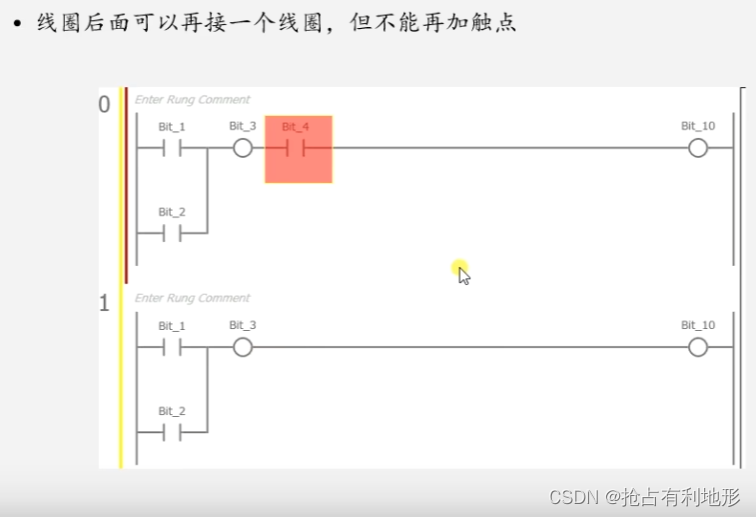
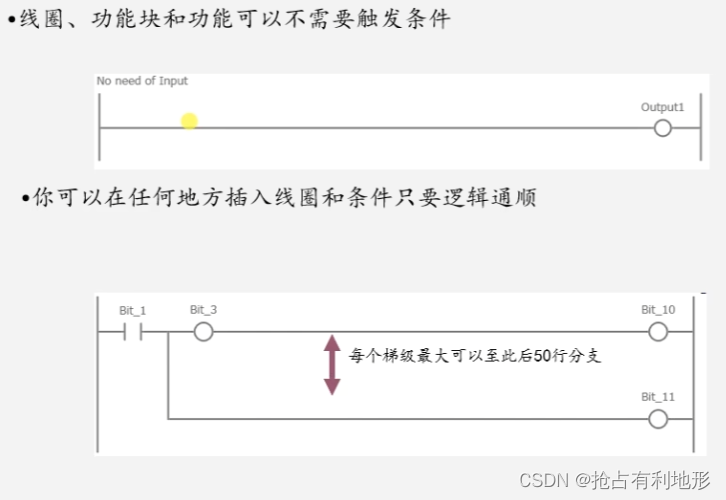
8.1. 执行顺序和书写规范
8.2.定时器
Timer响应时间快精度低,Ton响应时间慢精度高。设定时间的格式稍有区别。 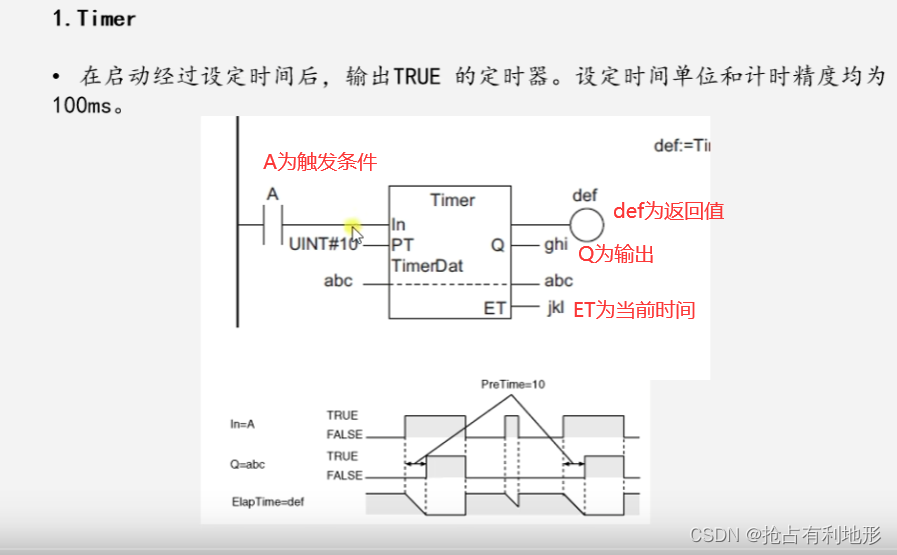 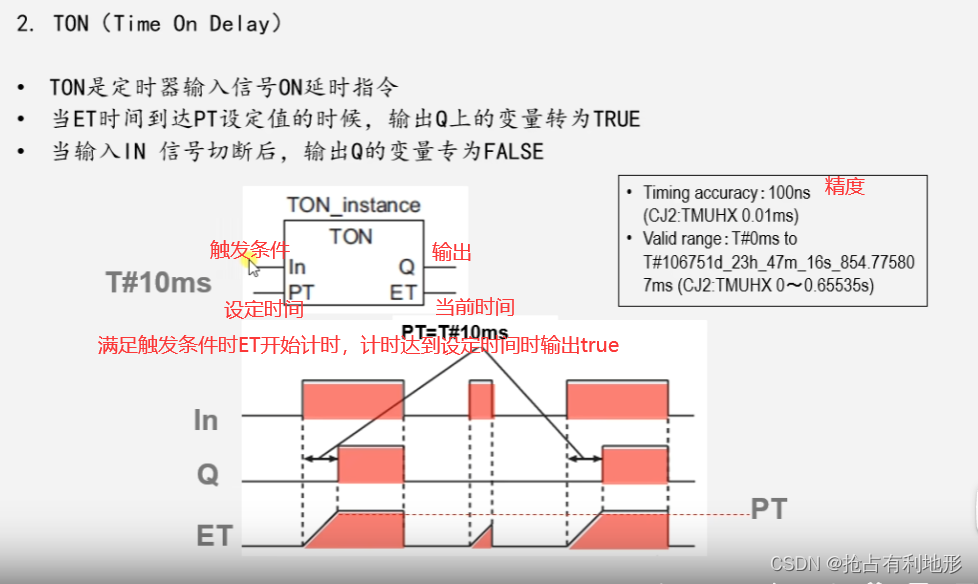 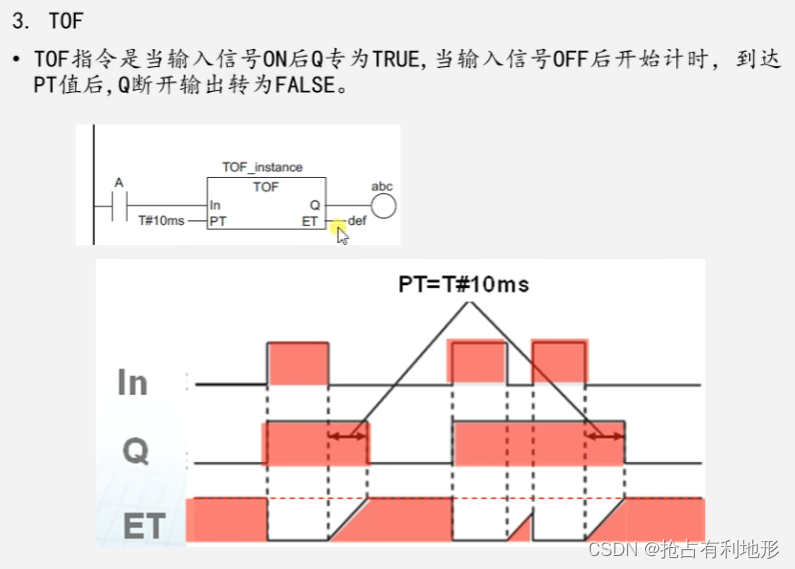 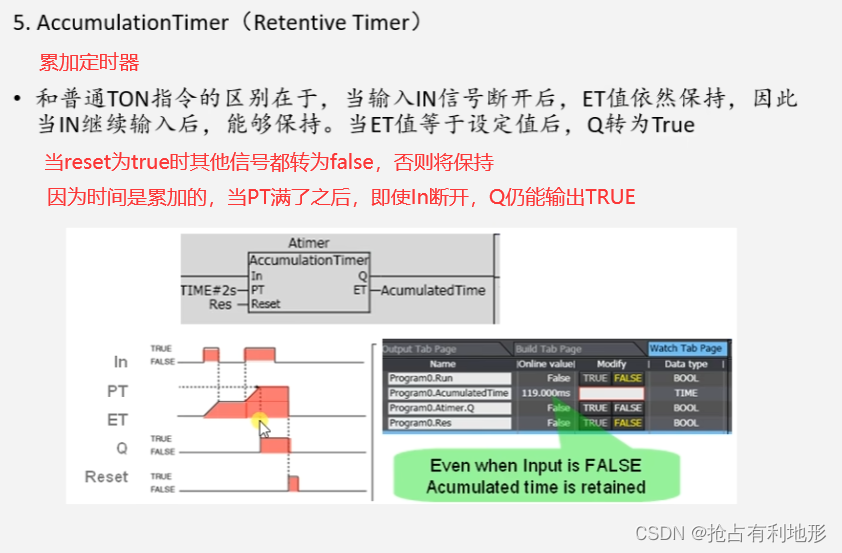 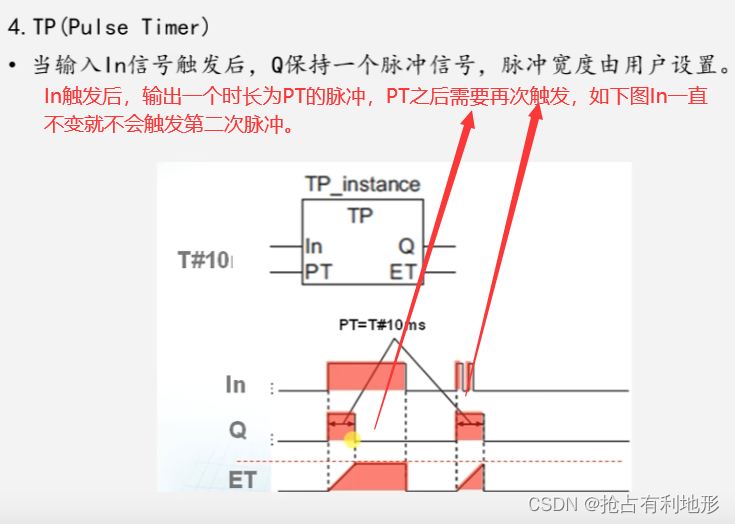 获取时钟脉冲,没有触发条件的定时器,前缀为Get,后缀为Clk的功能,如Get100msClk。 获取时钟脉冲,没有触发条件的定时器,前缀为Get,后缀为Clk的功能,如Get100msClk。 
8.3.计数器
 CTD CTD 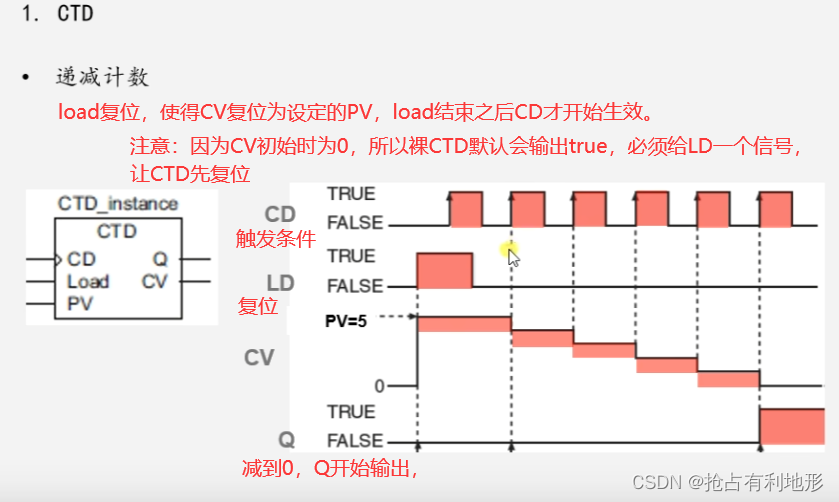 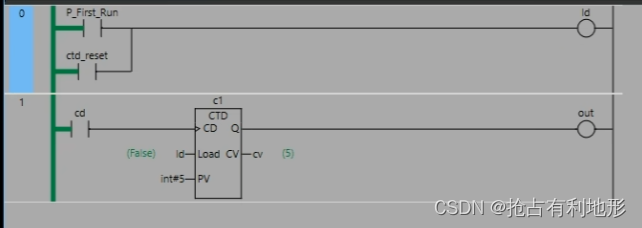 CTU CTU 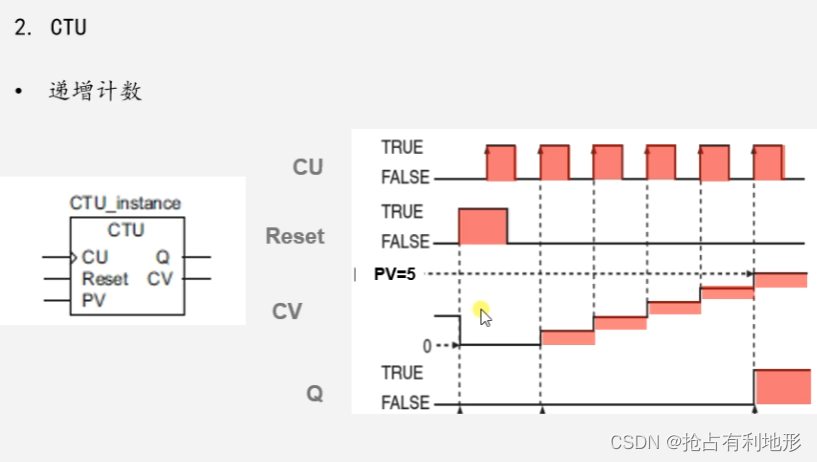 可逆计数器 可逆计数器 
计数器、定时器小测试
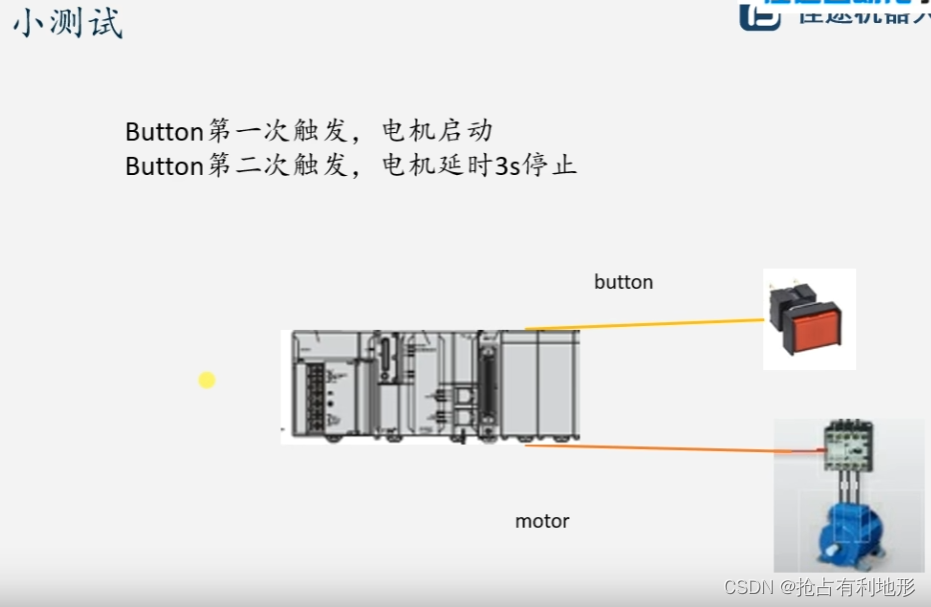 计数器+定时器实现 计数器+定时器实现 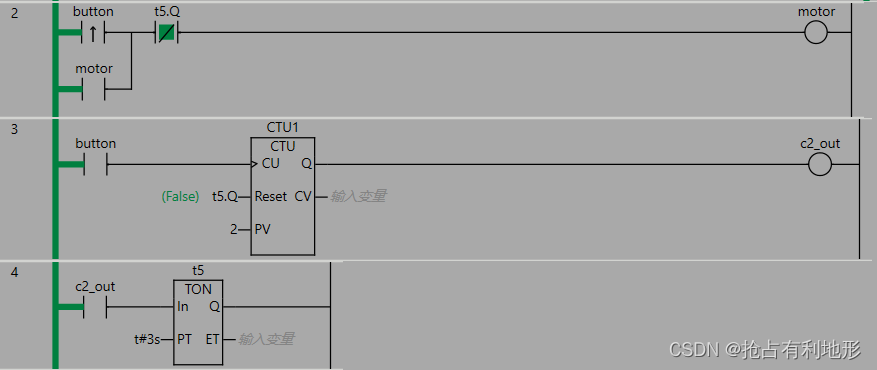 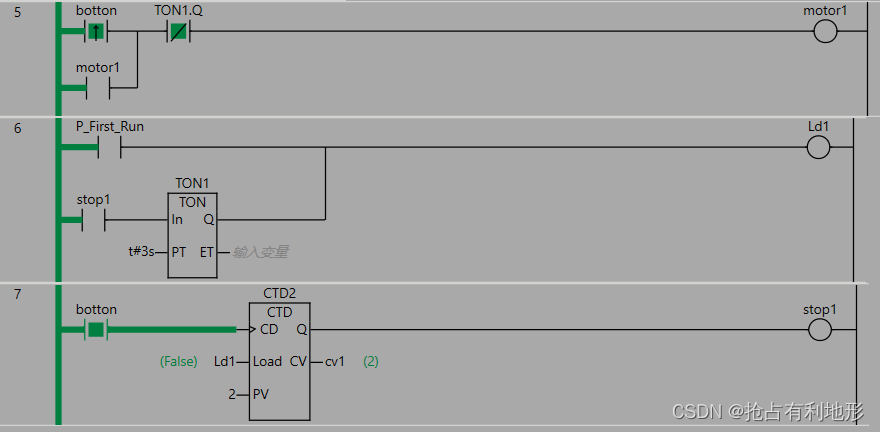 数据比较+定时器实现 数据比较+定时器实现 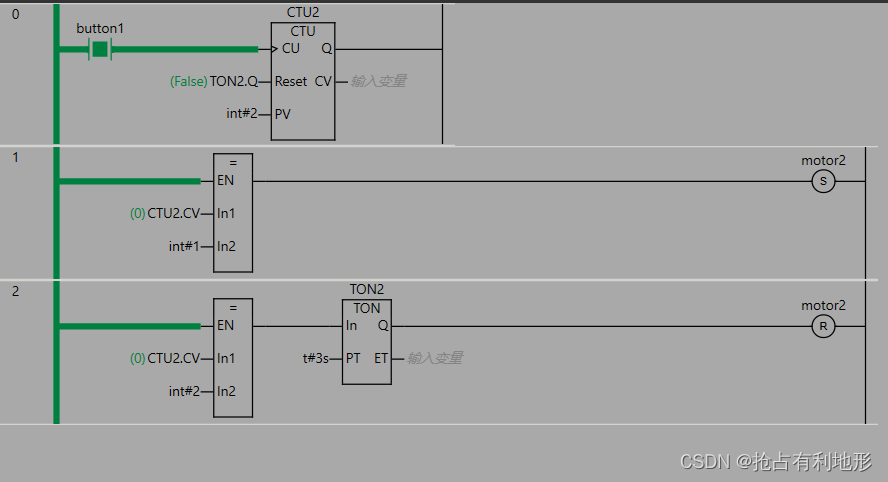
8.4.数据比较
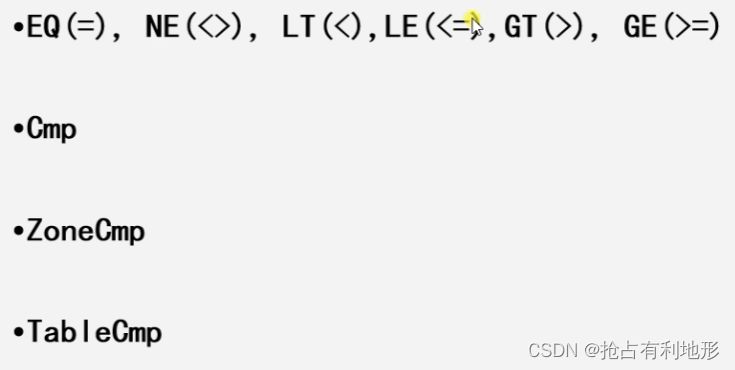 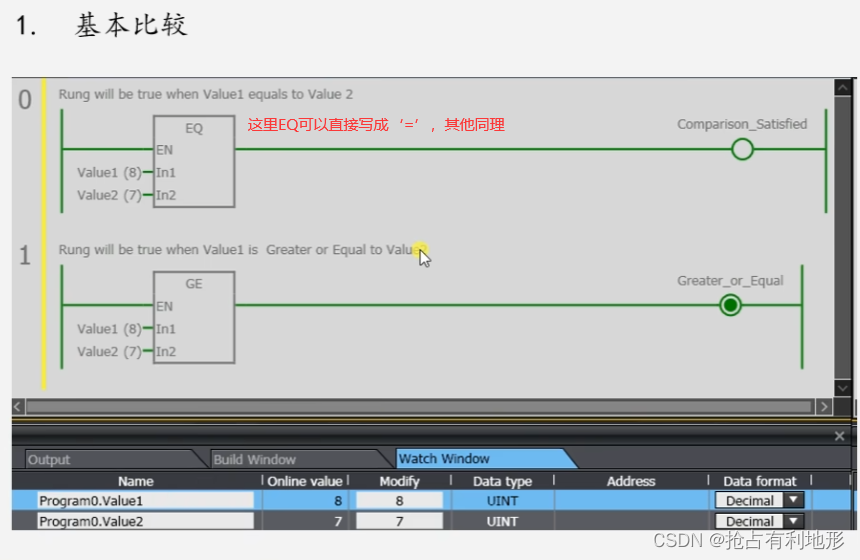 cmp列出所有比较结果 cmp列出所有比较结果 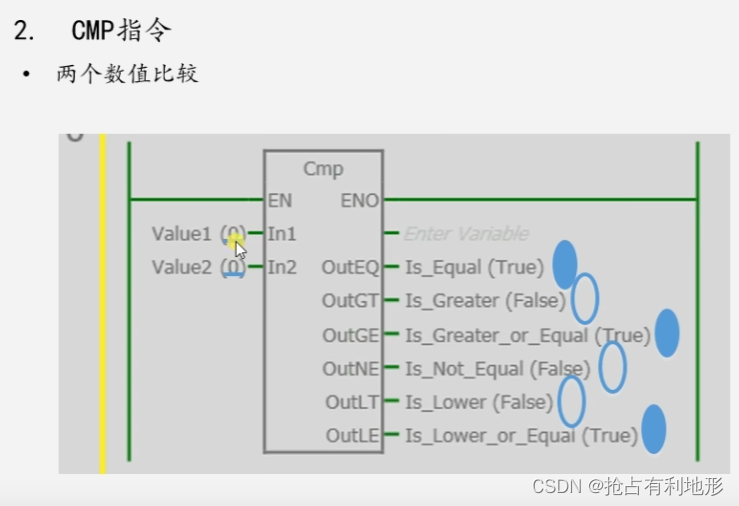 判断数值范围 判断数值范围 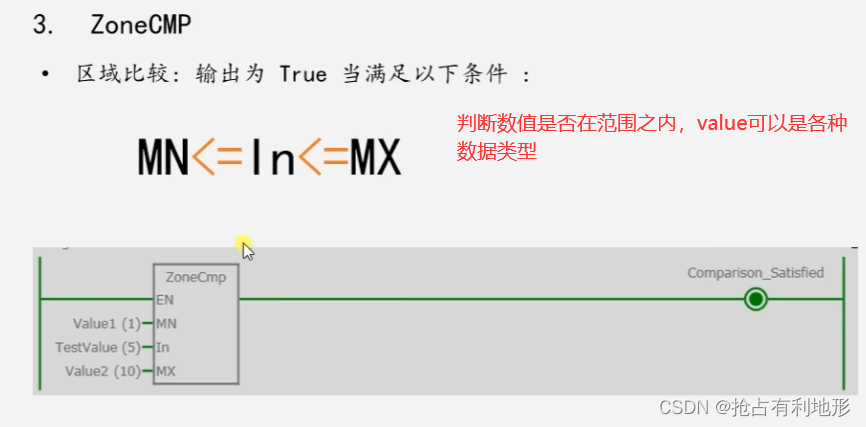 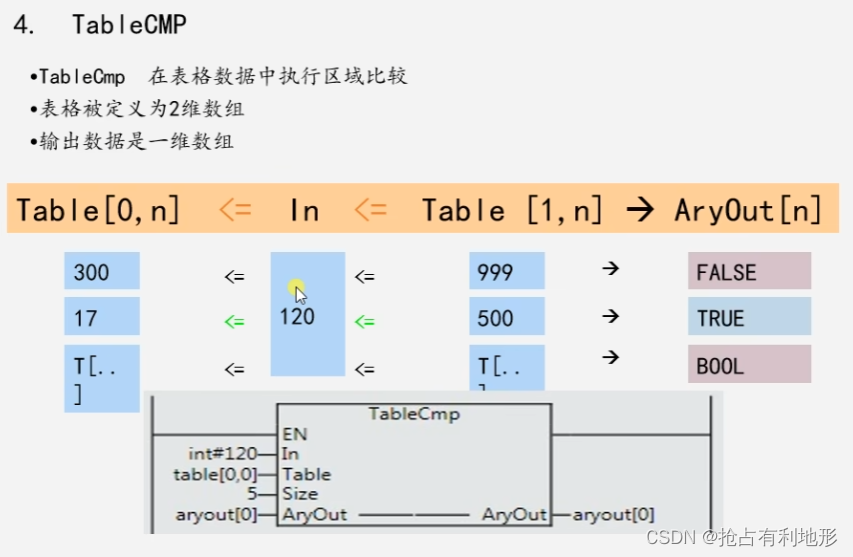
8.5.数据传送
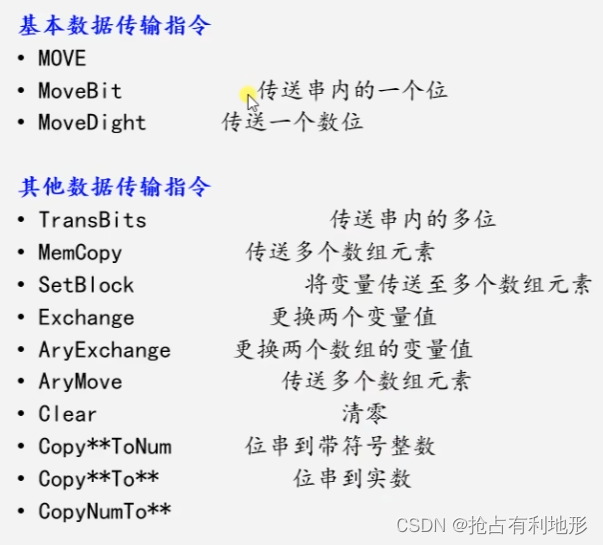 需要输出参数的内存能够容纳输入参数,否则不能转换,会报错。 需要输出参数的内存能够容纳输入参数,否则不能转换,会报错。 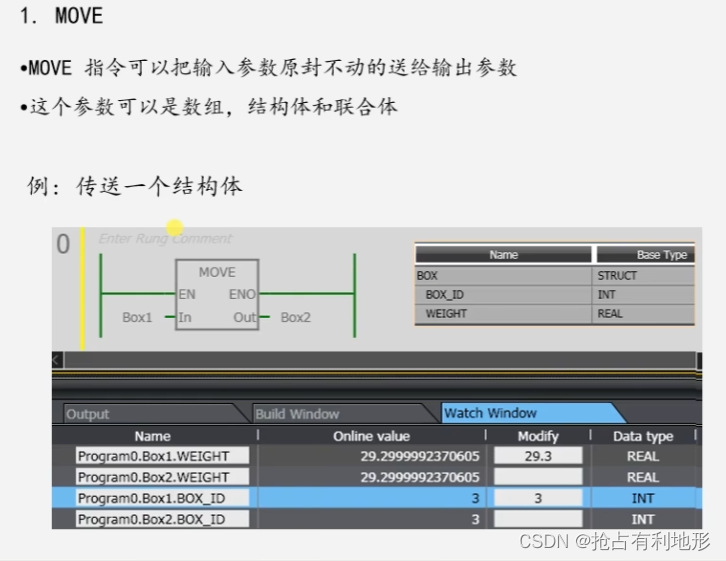 MOVEBit传一个位 MOVEBit传一个位 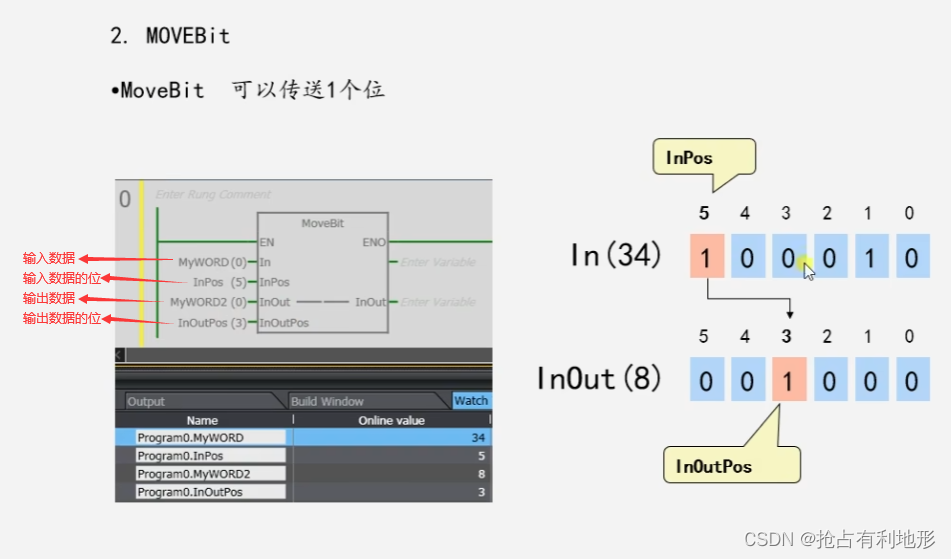 传多个位 传多个位 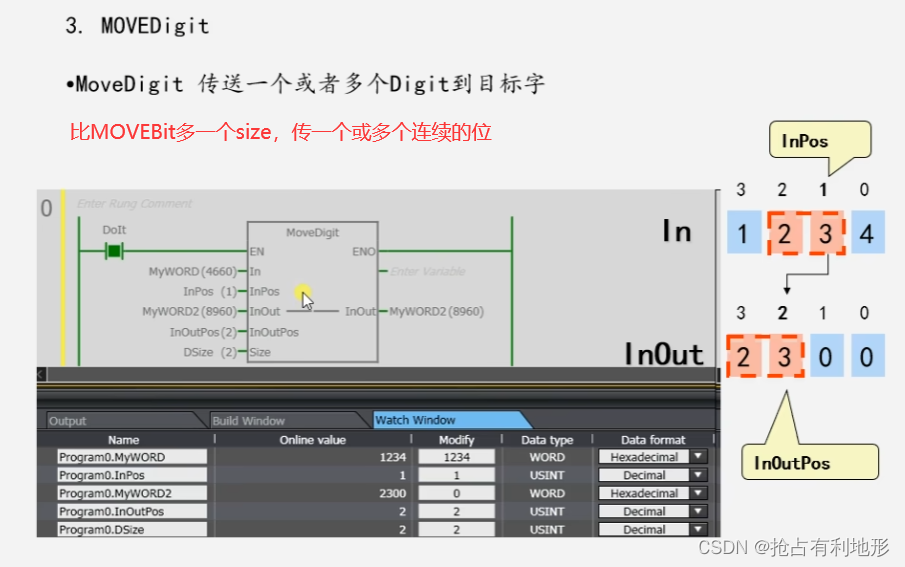 memcopy数组传送多个元素到另一数组 memcopy数组传送多个元素到另一数组 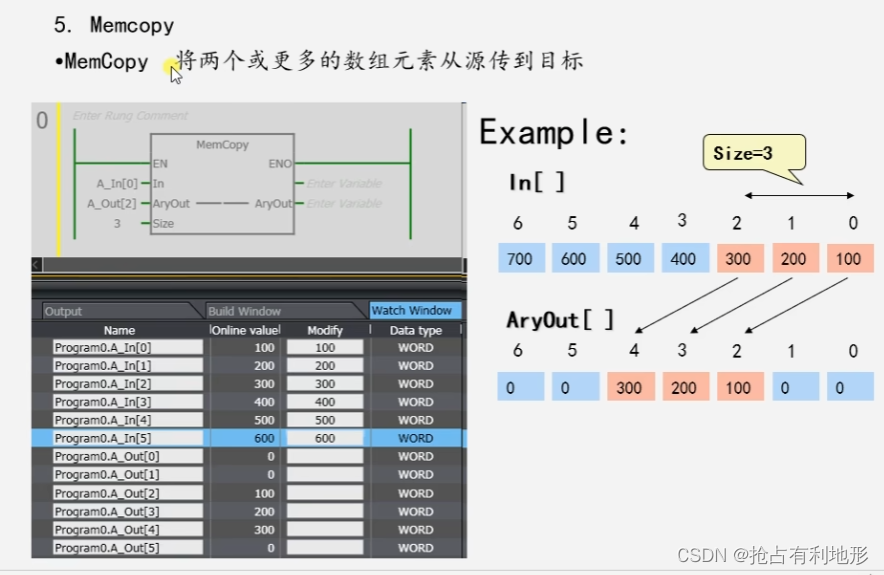
8.6.数据类型冲突的解决办法
8.6.1.数据类型转换
int型转换为time型 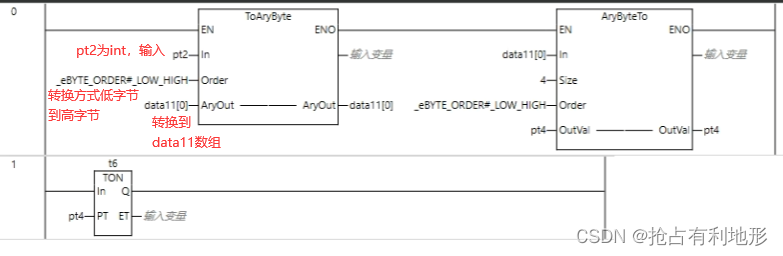
8.6.2.换一条支持的指令
例如sub指令不支持time类型,可以换成sub_time指令。
8.7.自定义功能/功能块
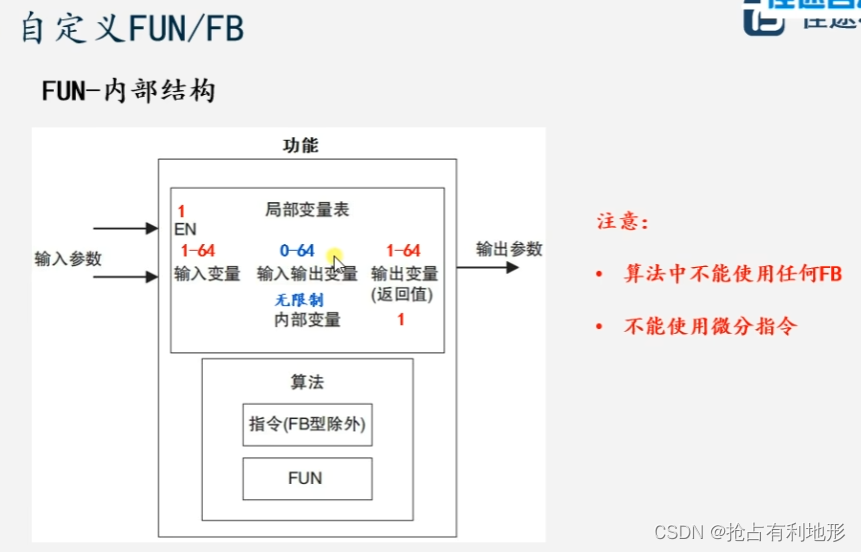
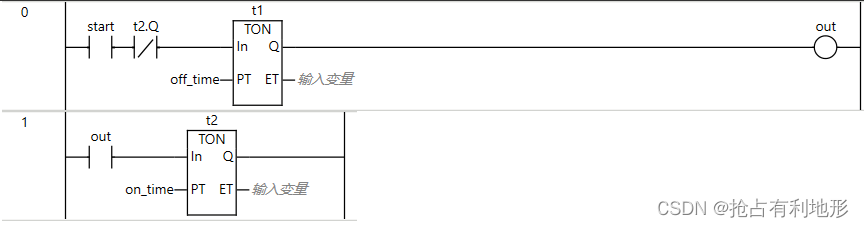
如下例子为角度转弧度的自定义功能。  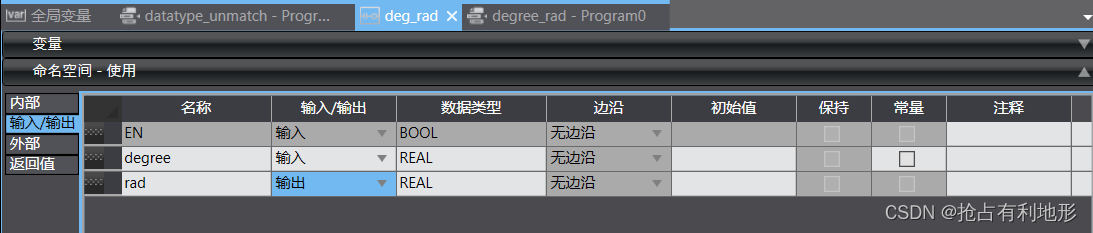 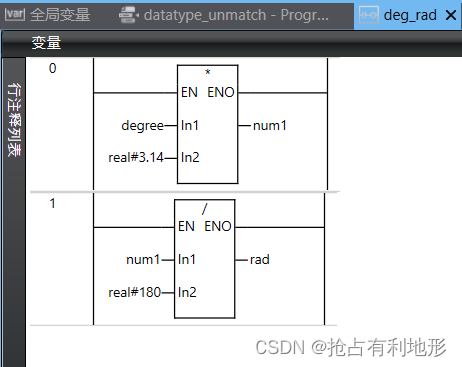 自定义功能块 自定义功能块 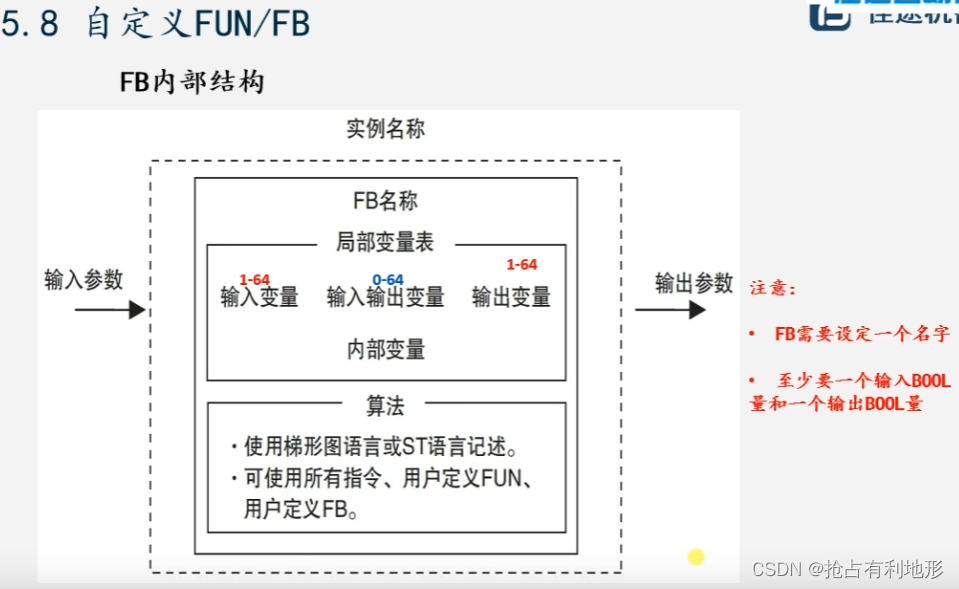 下面的案例为周期脉冲 下面的案例为周期脉冲 
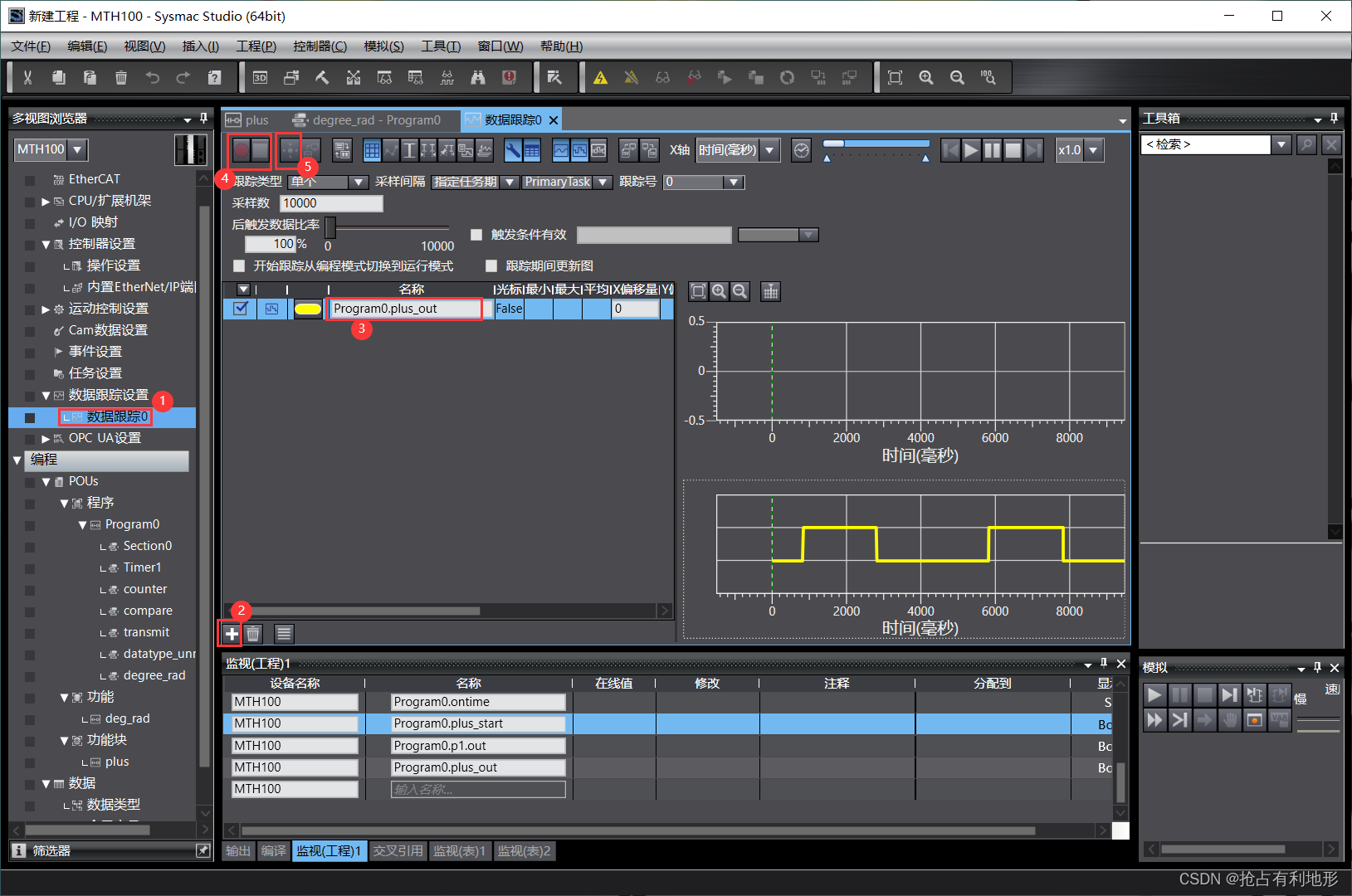
8.8.数据跟踪
9.创建库
新建库工程 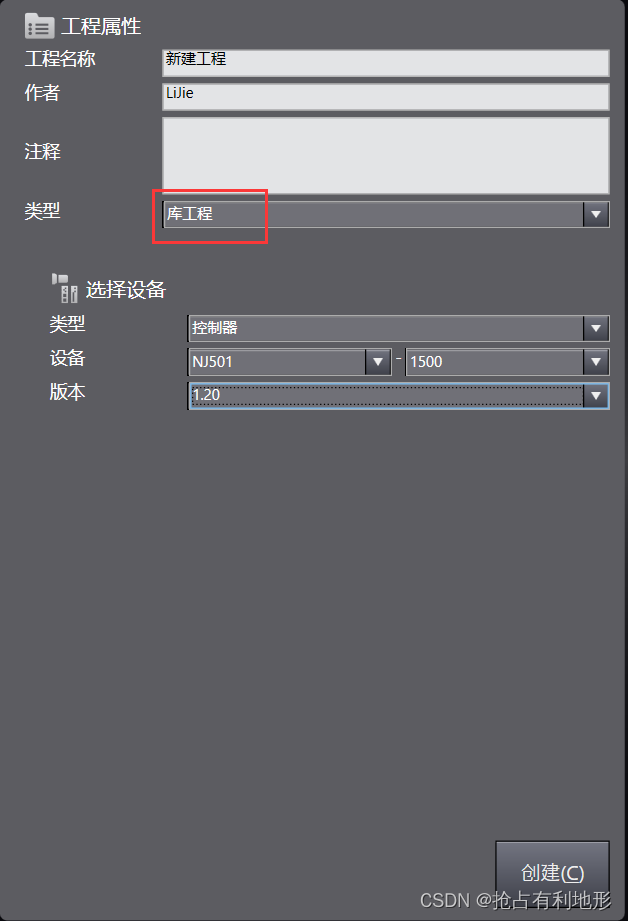 在库工程中创建功能块 在库工程中创建功能块 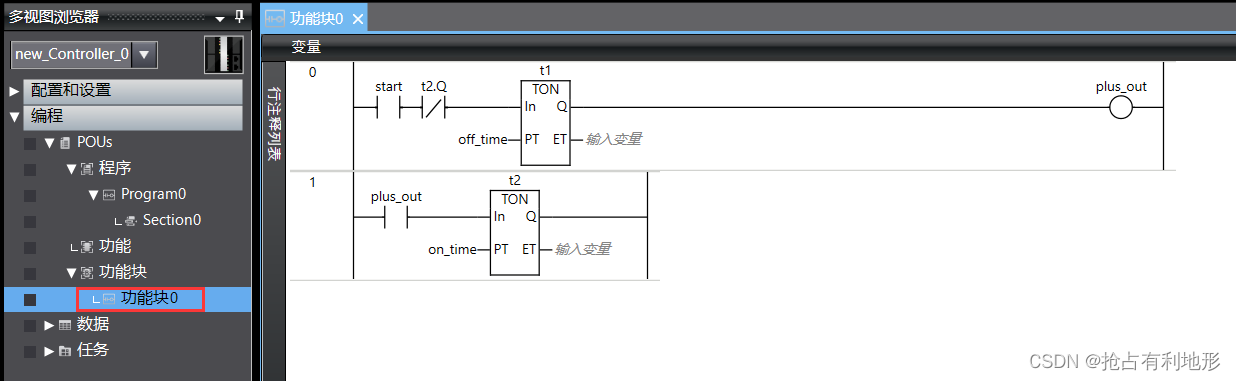 测试没有问题之后点击 工程->库->库设置 测试没有问题之后点击 工程->库->库设置 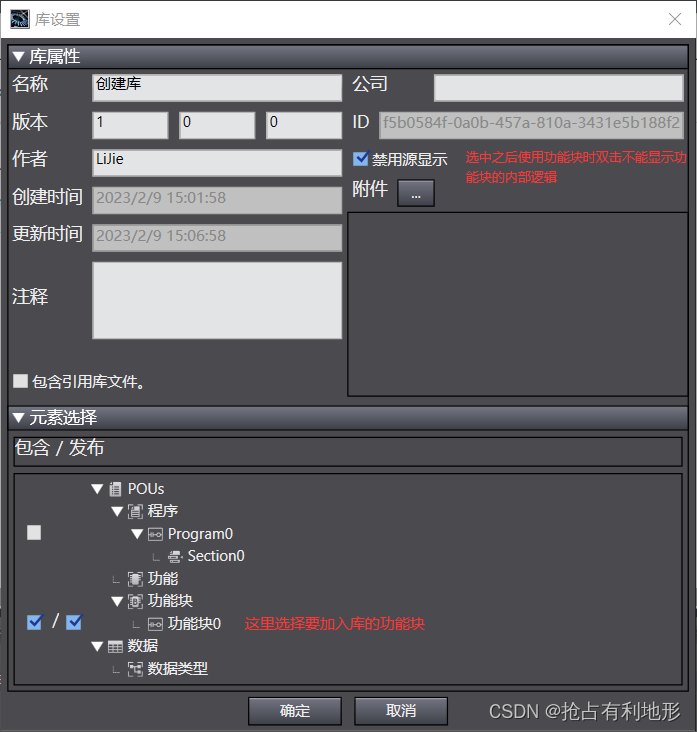 库设置完成后点击 工程->库->创建库 ,选择保存位置保存。导入库:点击 工程->库->显示索引,点 + 号,选择保存的文件,点击确定即可。
10.ST语言及编程规则
10.1.书写规范 库设置完成后点击 工程->库->创建库 ,选择保存位置保存。导入库:点击 工程->库->显示索引,点 + 号,选择保存的文件,点击确定即可。
10.ST语言及编程规则
10.1.书写规范
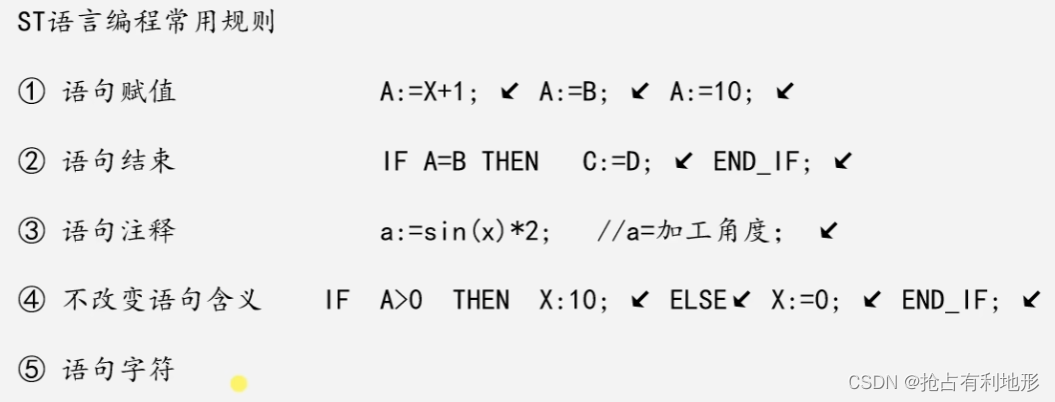
10.2.运算符
 ST语言中时间应表示为 “T#10s"或"time#10s”,直接写“10s”无法识别。类似的还有时刻、字符串。 ST语言中时间应表示为 “T#10s"或"time#10s”,直接写“10s”无法识别。类似的还有时刻、字符串。
10.3.条件语句、分支语句、循环语句
条件语句 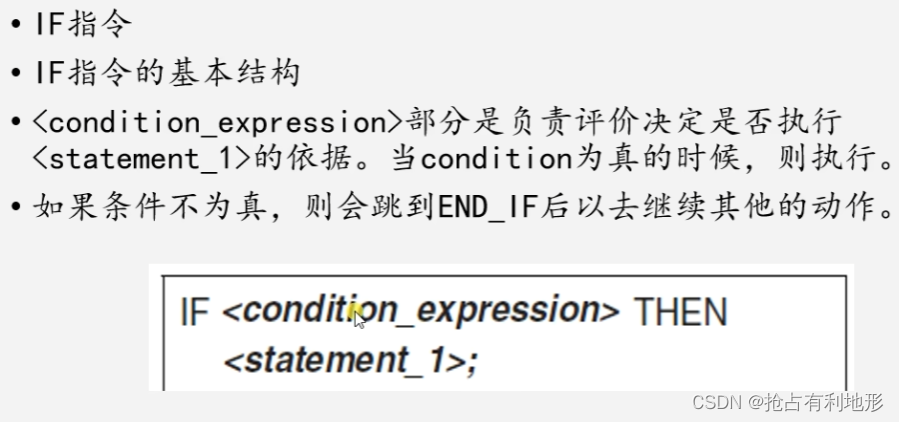 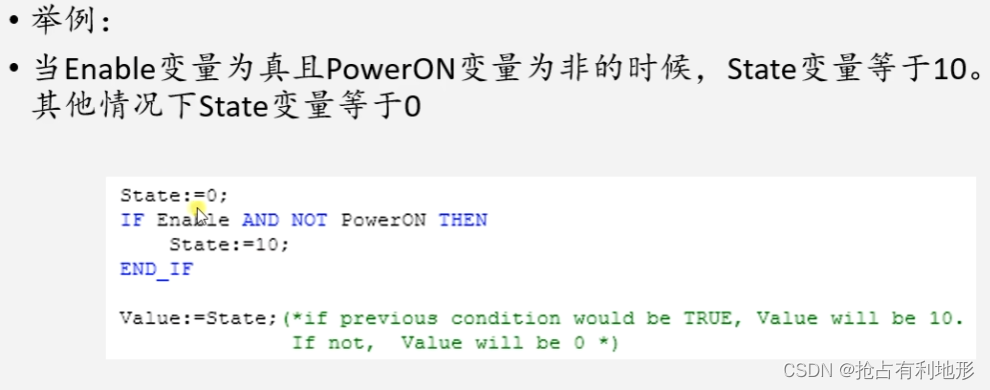 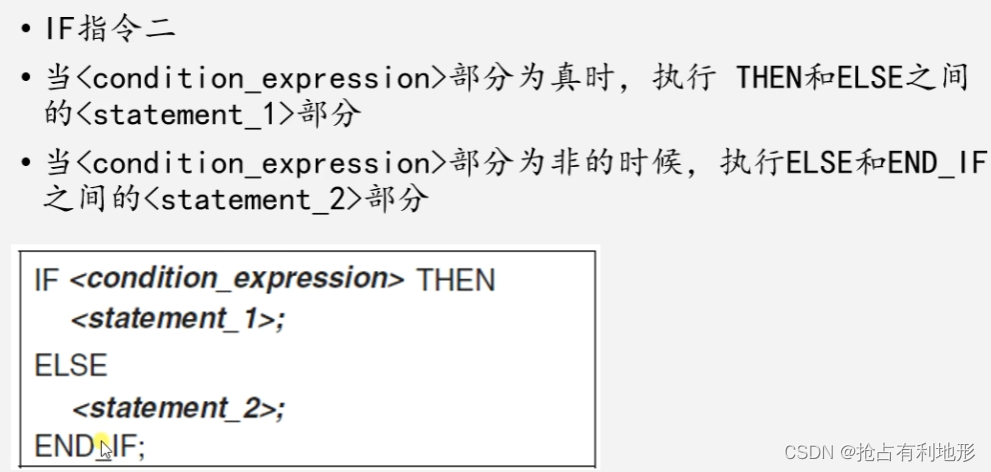 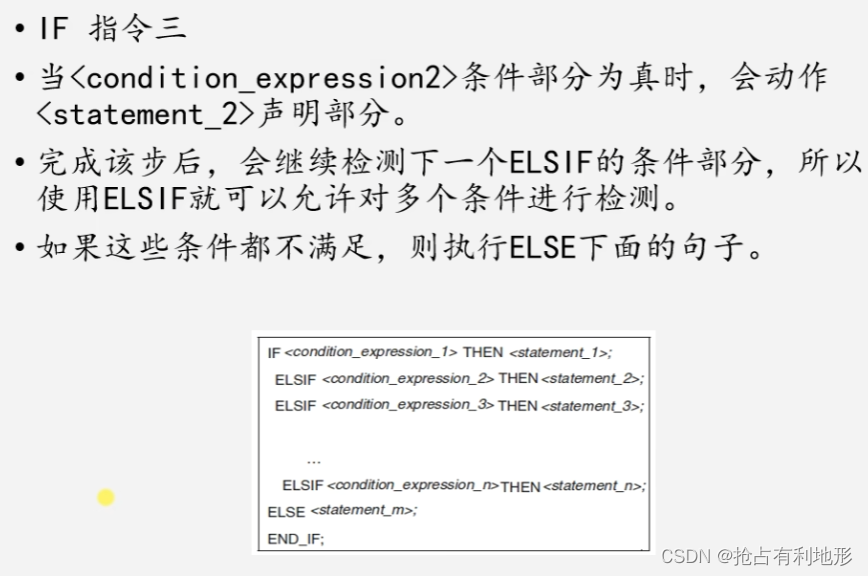 例 例 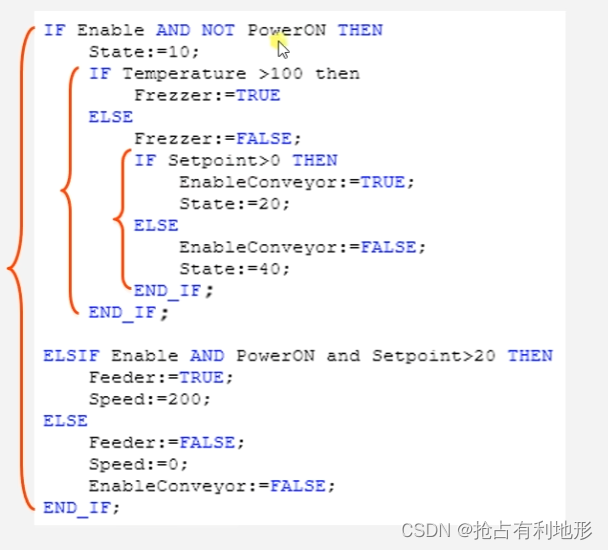 分支语句CASE 分支语句CASE 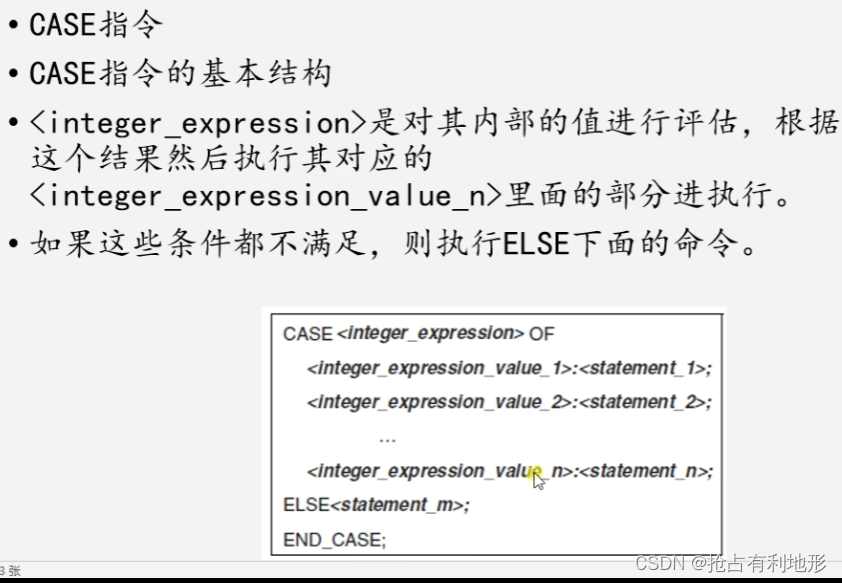 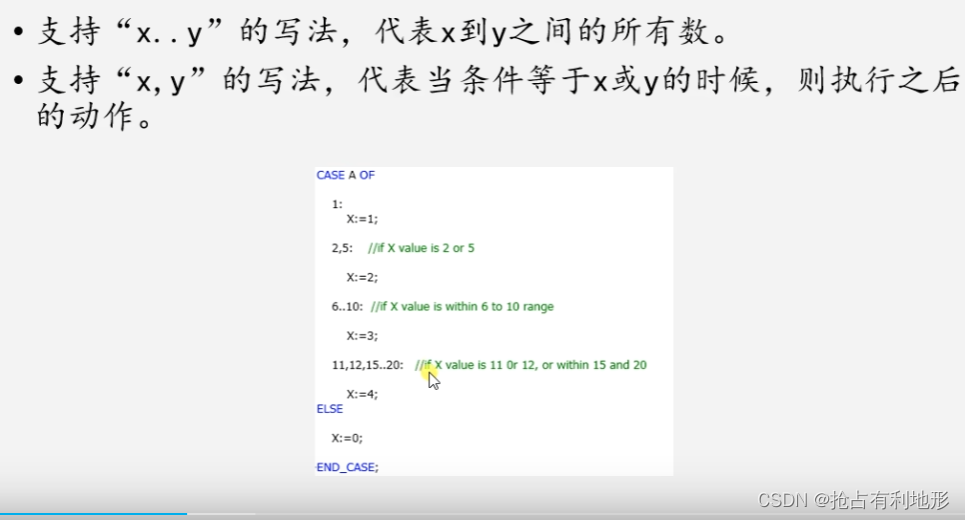 CASE语句和枚举体使用 CASE语句和枚举体使用  循环语句 for 循环语句 for 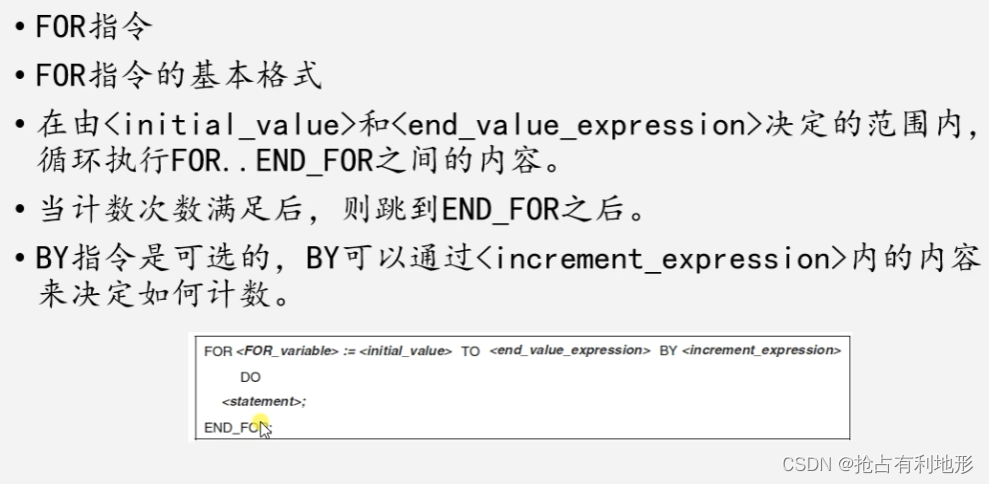 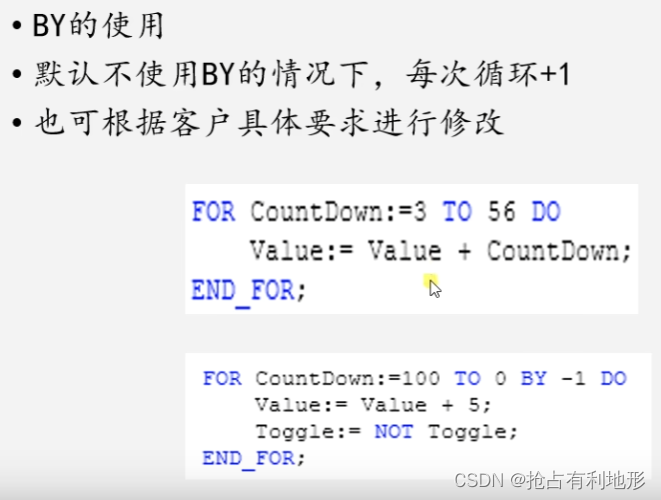 while while 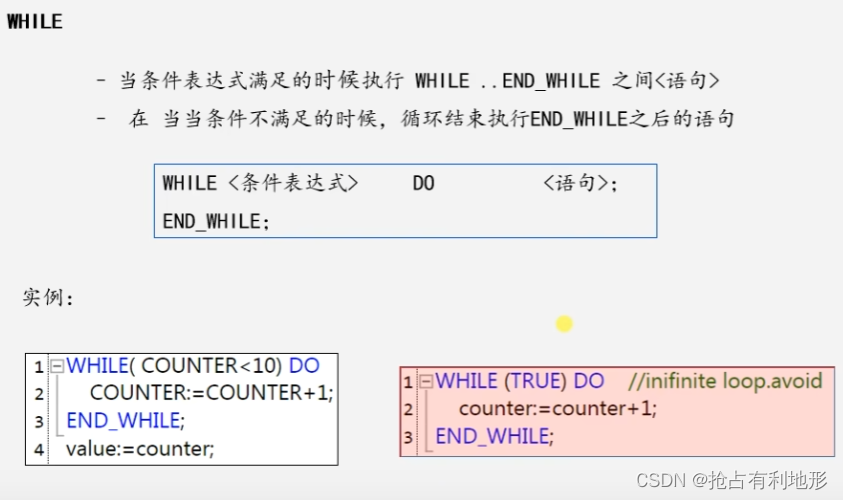 repeat(类似do … while) repeat(类似do … while) 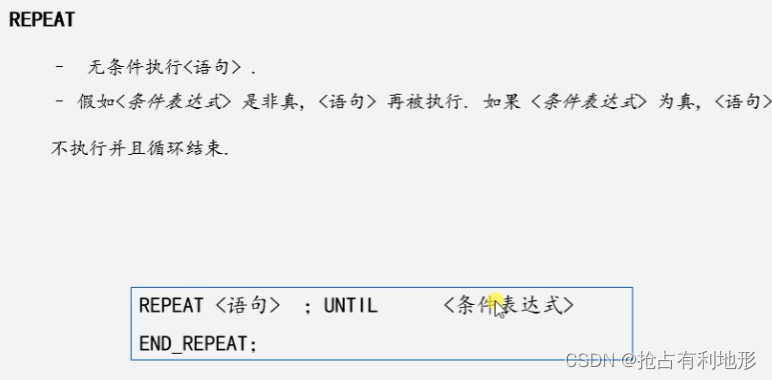 10.4.ST程序显示不加载
10.4.ST程序显示不加载
点击任务设置,程序分配设置,点击 + 号,将ST程序加入任务,再点击运行即可。 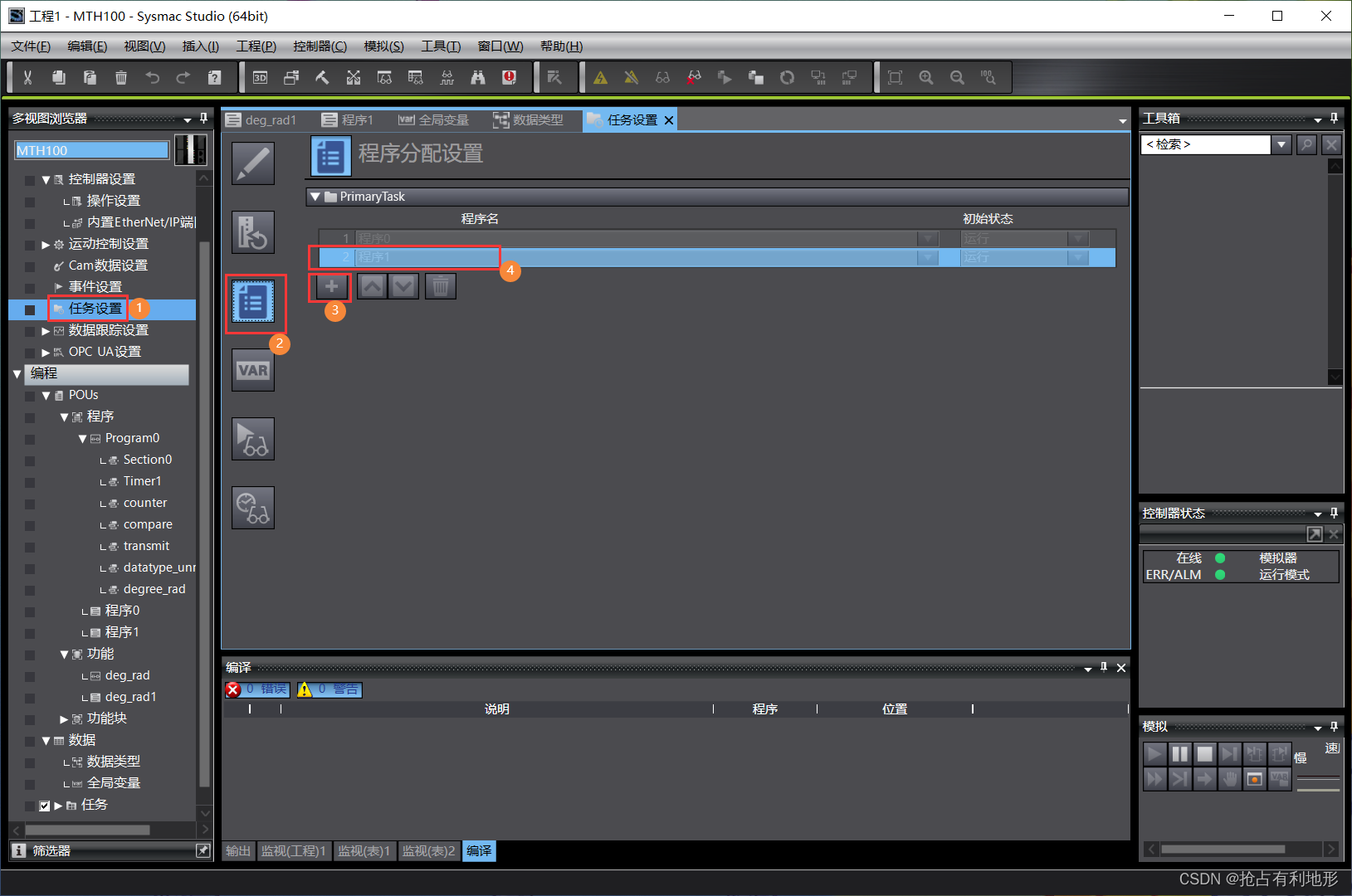
10.5.ST语言调用FUN/FB
手册可查是否可用ST调用。  调用方式 调用方式 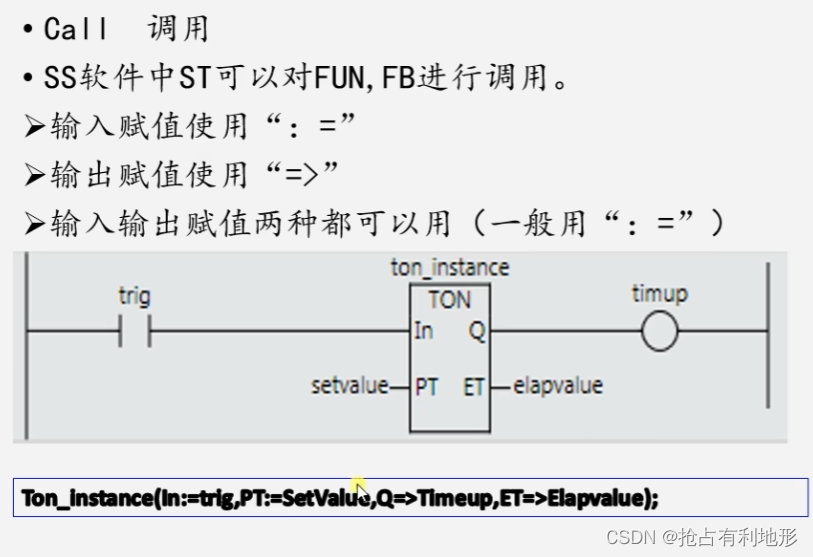 例 例 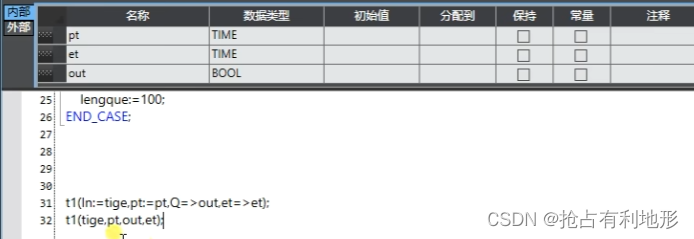 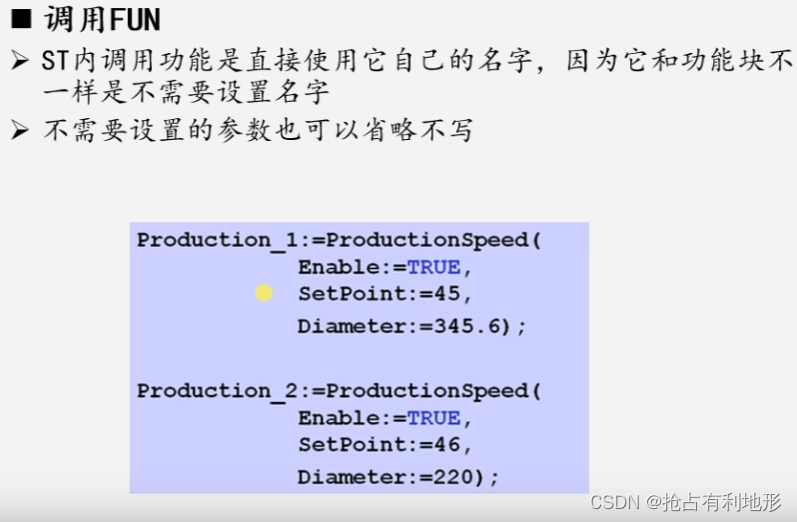
11.NJ运动控制
11.1.EtherCat网络
11.1.1.状态指示灯

11.3.轴的基本动作指令
启动伺服 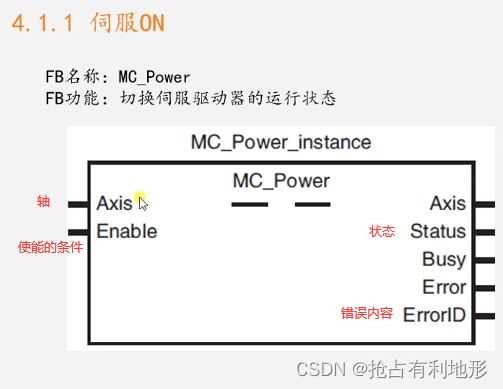 例 例 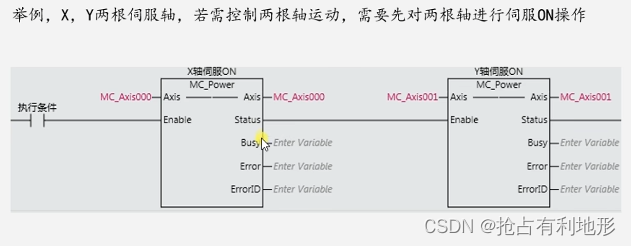 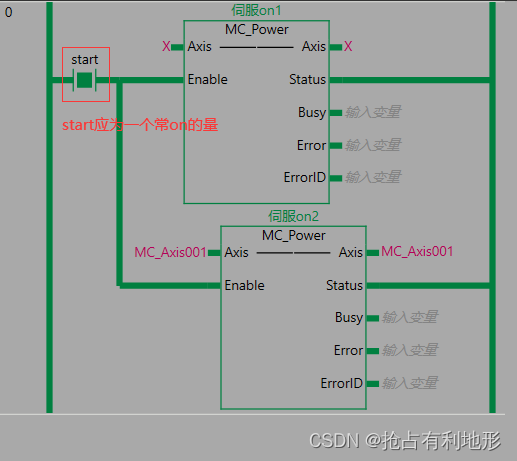 伺服点动,positive和negative同时触发时是正向优先,但若是一前一后触发,则是后触发的执行。 伺服点动,positive和negative同时触发时是正向优先,但若是一前一后触发,则是后触发的执行。 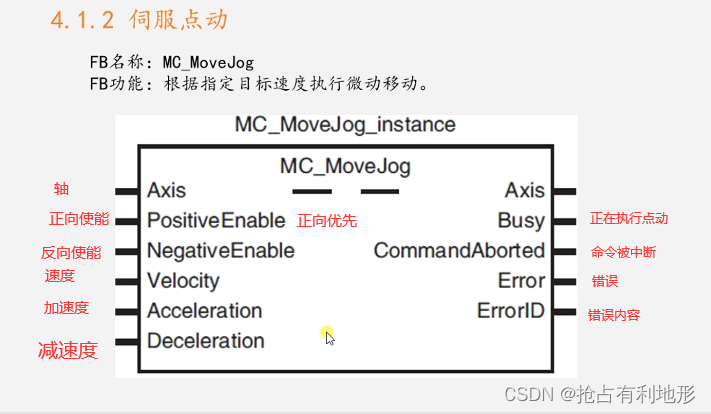 伺服点动要先启动伺服。 Velocity的单位:与轴设置的单位一致。 伺服点动要先启动伺服。 Velocity的单位:与轴设置的单位一致。 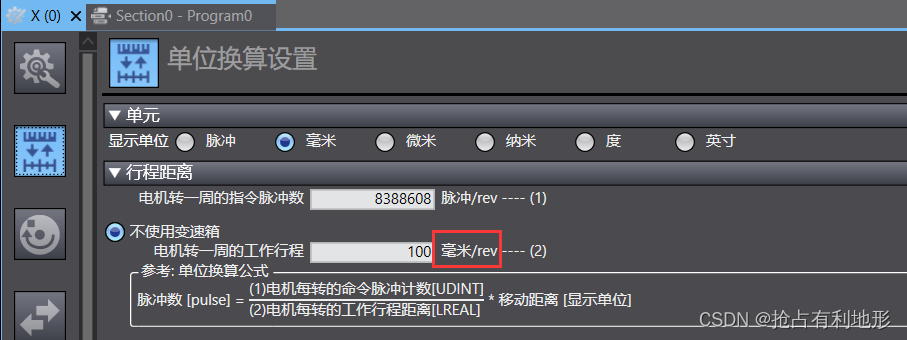 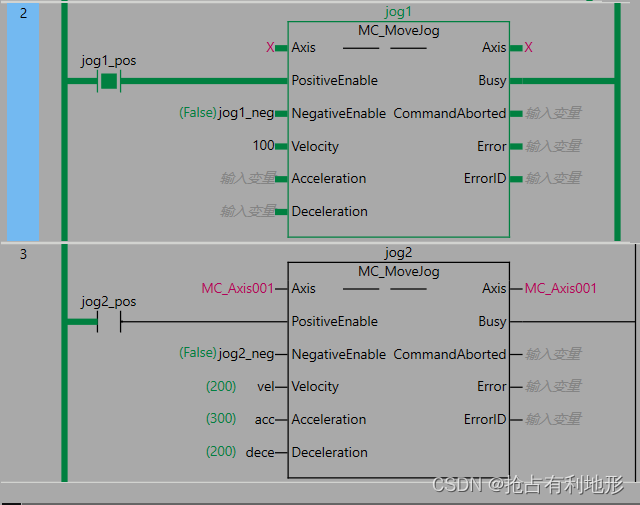 停止伺服 停止伺服 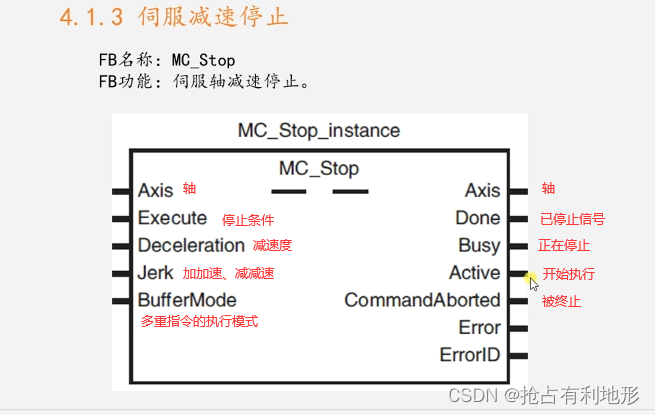 寻找原点,伺服回到原点并且停止。 寻找原点,伺服回到原点并且停止。 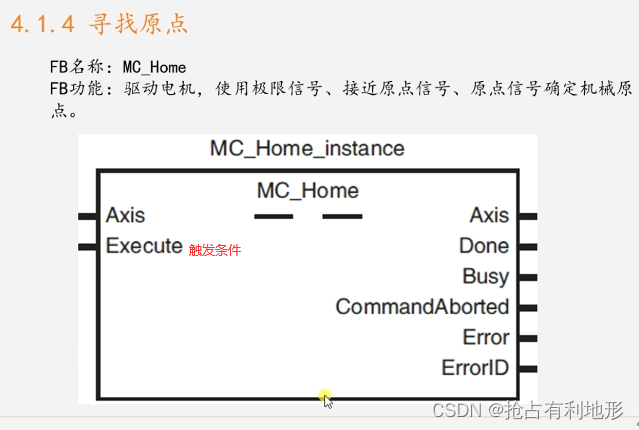
11.4.轴的位置控制
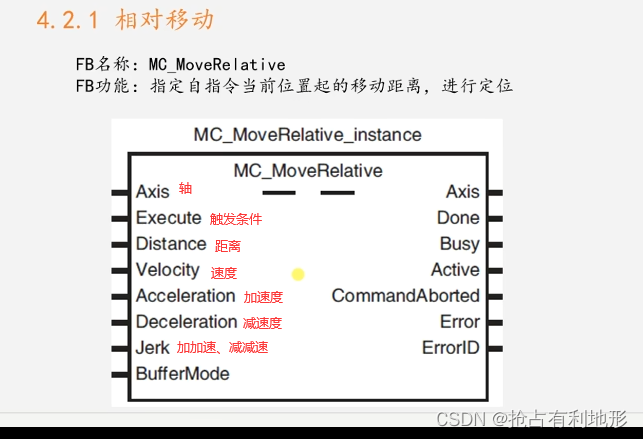 绝对移动,需要先吧轴停掉,否则会报错 绝对移动,需要先吧轴停掉,否则会报错 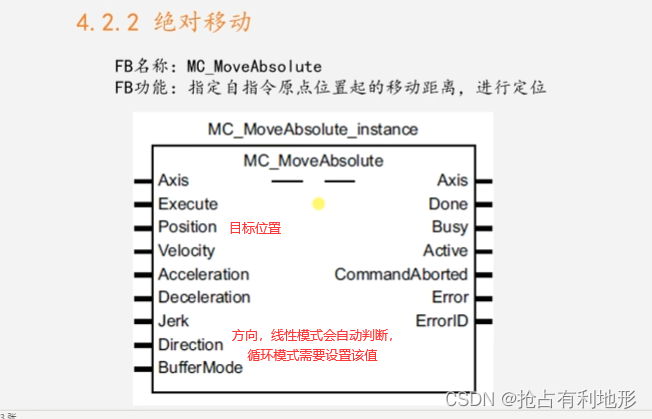 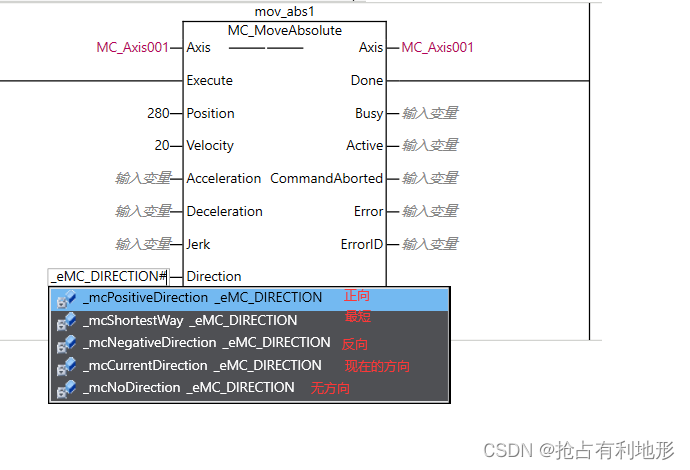 速度控制,MC_MoveVelocity修改速度(Velocity)要先停止,重新触发才会生效。运行MC_MoveVelocity要先吧轴停掉,否则会报错。 速度控制,MC_MoveVelocity修改速度(Velocity)要先停止,重新触发才会生效。运行MC_MoveVelocity要先吧轴停掉,否则会报错。 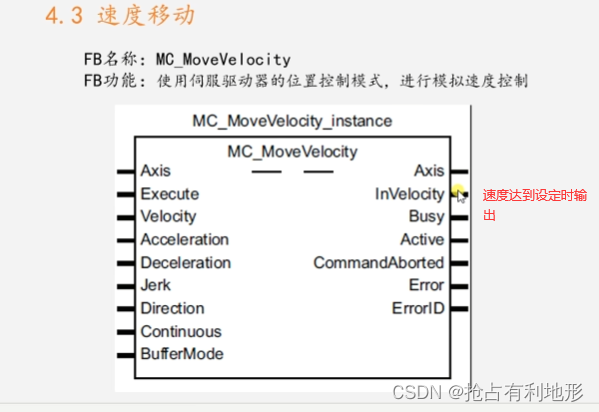 MC_SetOverride无需重新触发也能生效,且不会冲突。enable信号保持就能生效,enable信号断开则速度变回原样。 MC_SetOverride无需重新触发也能生效,且不会冲突。enable信号保持就能生效,enable信号断开则速度变回原样。 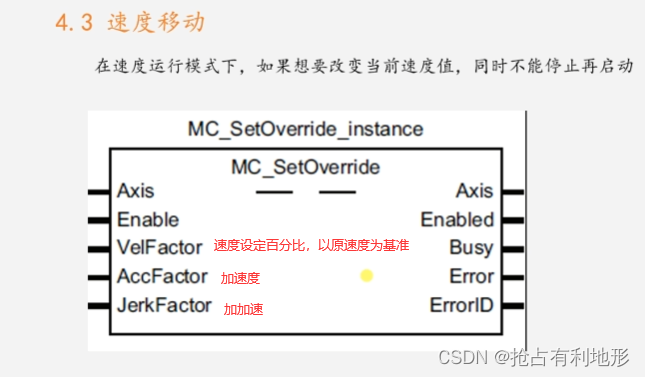 例:下面程序X轴的原速度为100,将VelFactor设置为120,速度变为120。 例:下面程序X轴的原速度为100,将VelFactor设置为120,速度变为120。 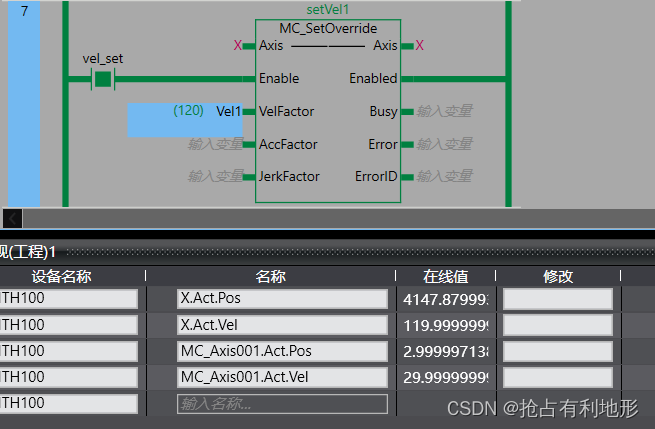
11.info Execute触发条件和Enable触发条件
Execute只采集上微分,MC_Stop、MC_Home、MC_MoveRelative 使用的是execute触发条件。 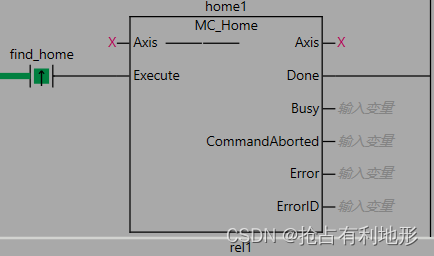 Enable需要一个常on的信号才能一直工作,信号为off时就会停止。 Enable需要一个常on的信号才能一直工作,信号为off时就会停止。
11.5.转矩控制
MC_TorqueControl需要先停止轴再启动。 MC_TorqueControl拧螺丝的问题,达到设定的最大力矩的时候会立马减小力矩,导致螺丝可能拧不紧。拧螺丝拧到底后需要保持最大力矩一段时间。 解决办法,使用MC_SetTorqueLimit 限制扭矩,加上定时器控制时间。 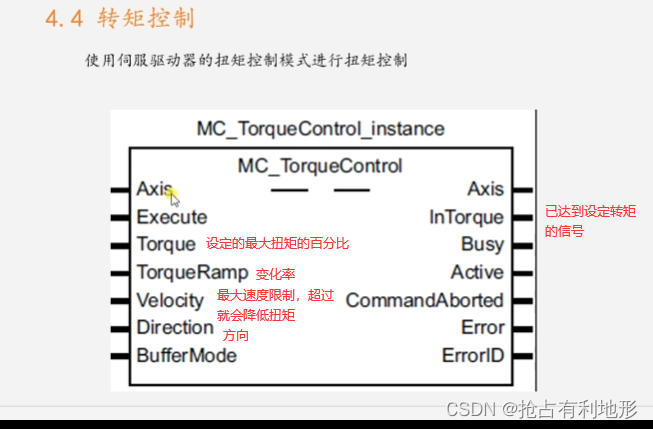 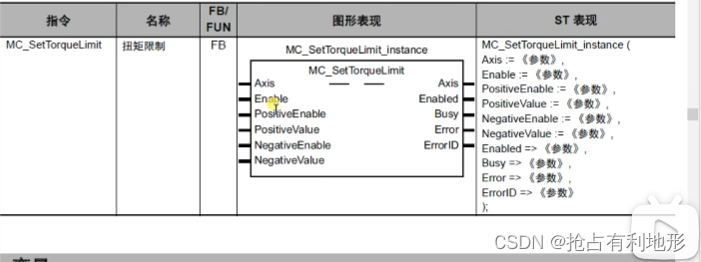
11.6.轴组控制
创建轴组 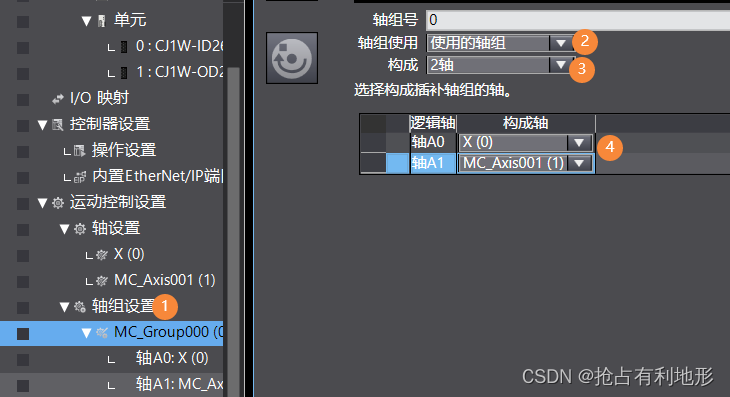 轴组使能与无效 轴组使能之后如果单独操作一根轴会报错,需要先使轴组无效才能操作单根轴。 轴组使能与无效 轴组使能之后如果单独操作一根轴会报错,需要先使轴组无效才能操作单根轴。 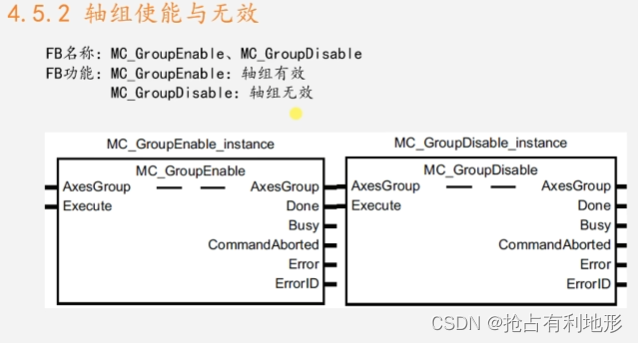 11.6.1.多轴直线插补
11.6.1.多轴直线插补
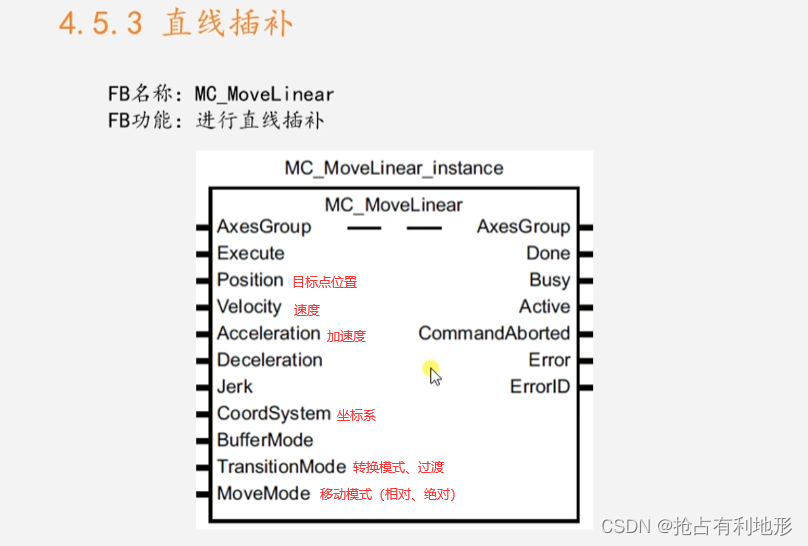 例 pos_b是一个数组,有几根轴就要设置几个元素,和轴组设置对应。 例 pos_b是一个数组,有几根轴就要设置几个元素,和轴组设置对应。 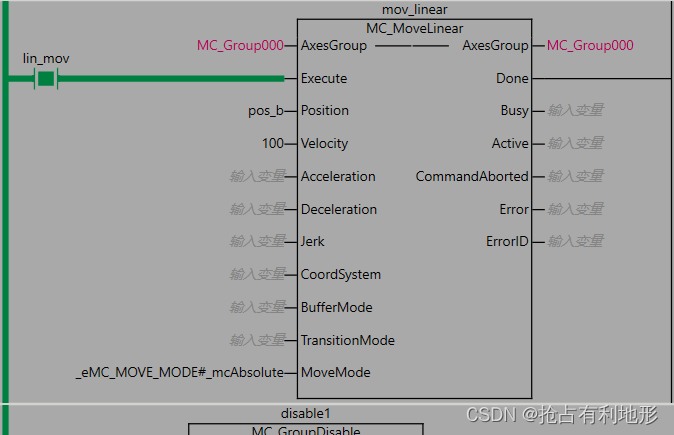  运行结果 运行结果 
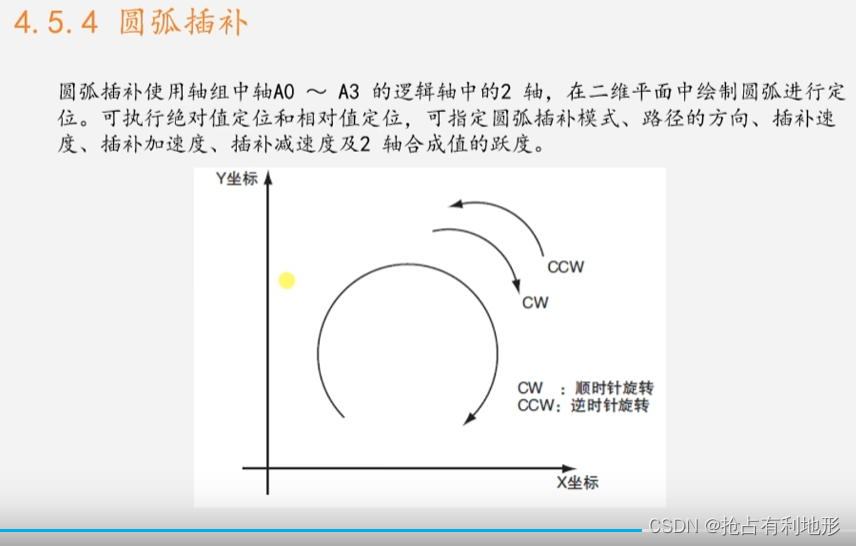
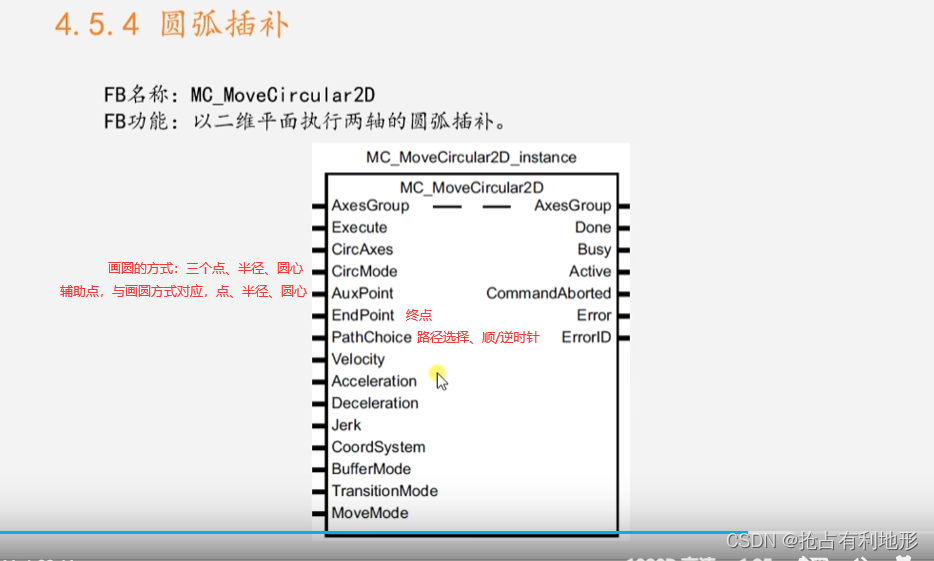
11.6.2.圆弧插补
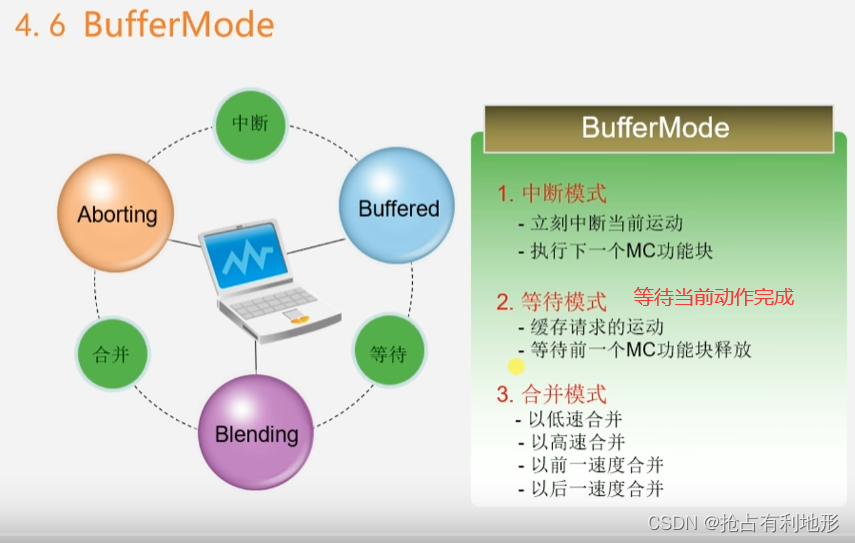
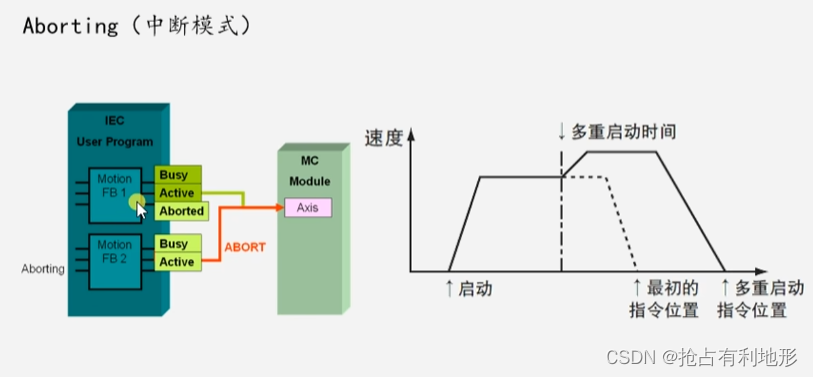
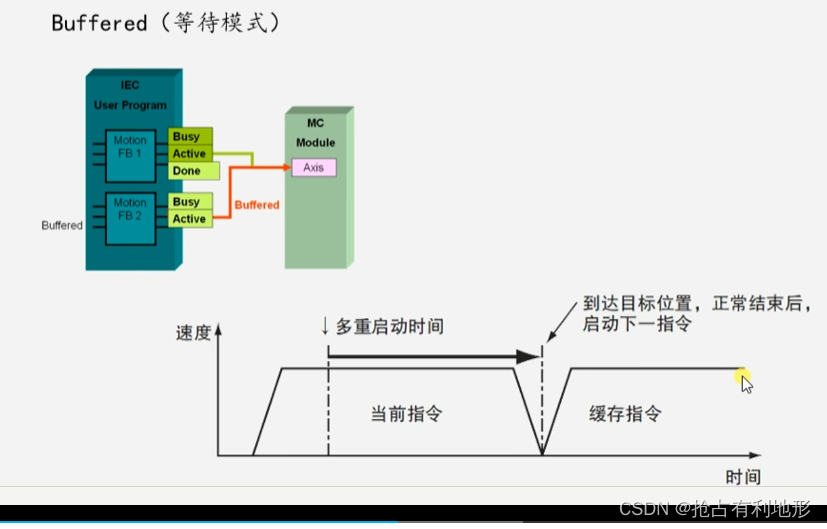
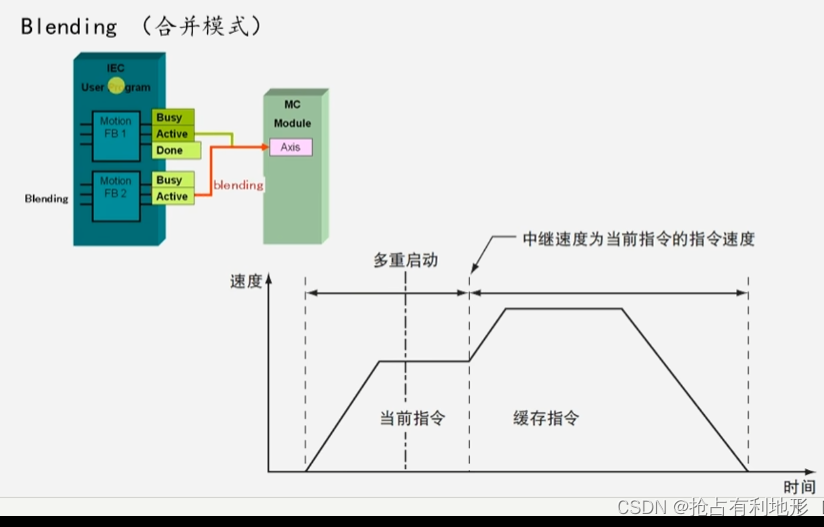
11.7.BufferMode
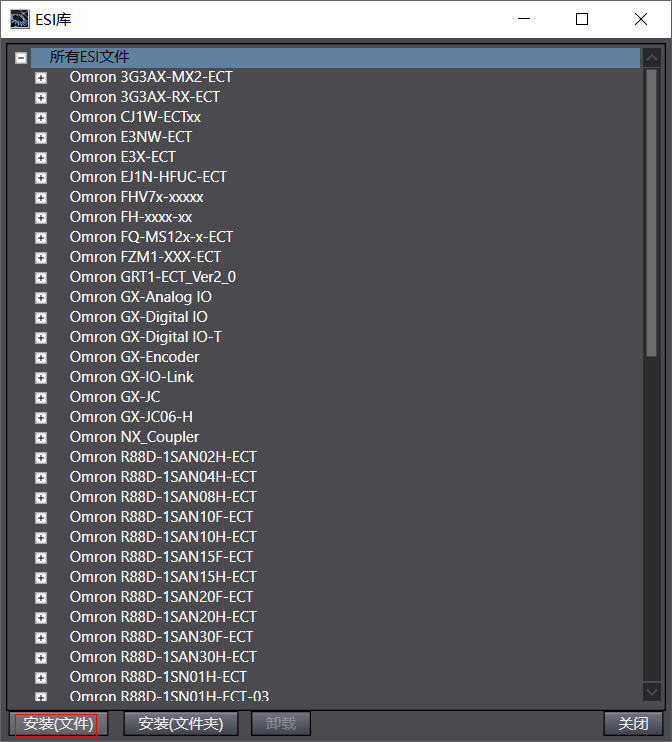
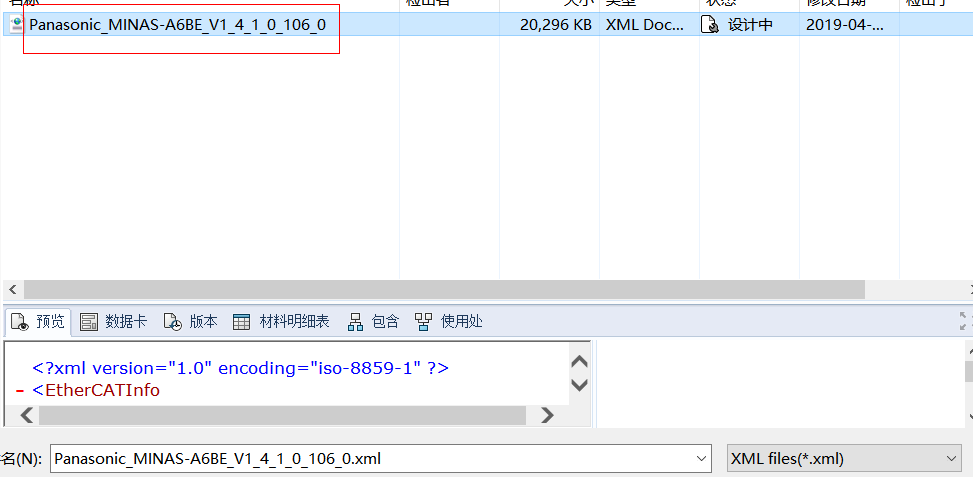
11.8.松下A6伺服(MADLN15BE)配置
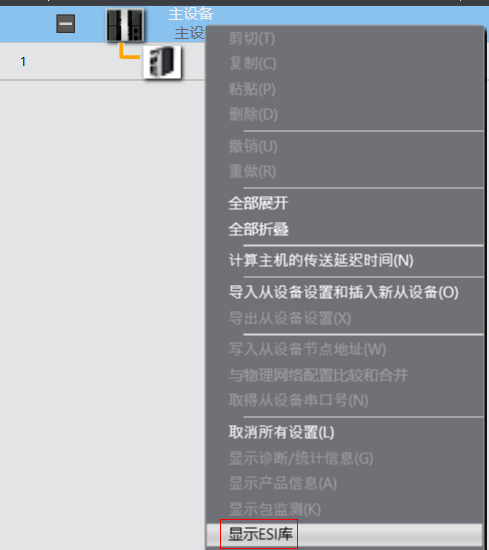
导入下载好的ESI文件(可从官网下载),才可以将扩展配置到机架上。
   2. 进行配置 编辑PDO映射,按照如下设置。 2. 进行配置 编辑PDO映射,按照如下设置。 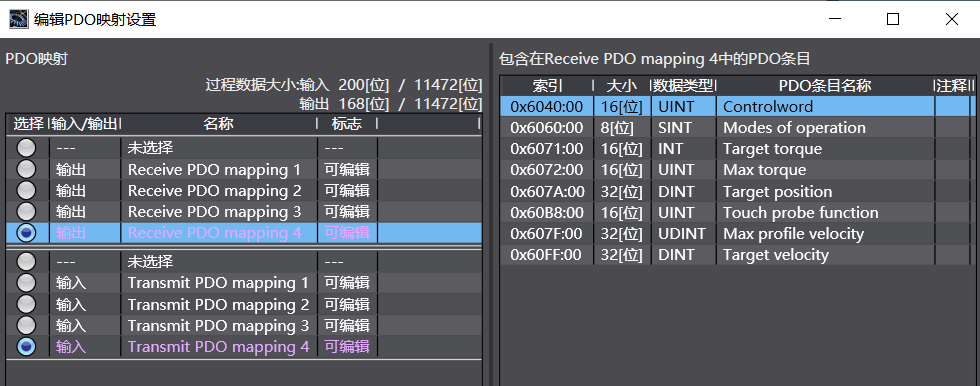 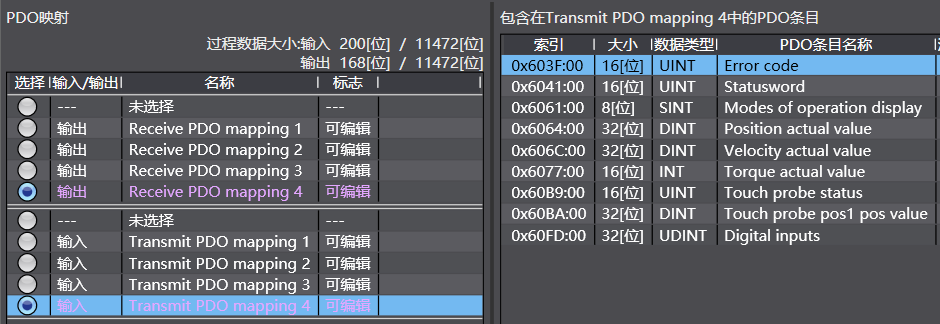 3. 新建轴,按照如下配置 3. 新建轴,按照如下配置 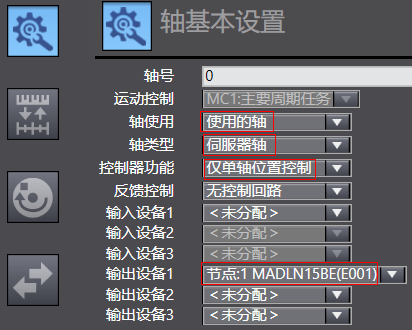 详细配置如下,如果详细设置里面想要的参数无法设置,可能是PDO映射中的输入输出没有包含该参数。 详细配置如下,如果详细设置里面想要的参数无法设置,可能是PDO映射中的输入输出没有包含该参数。 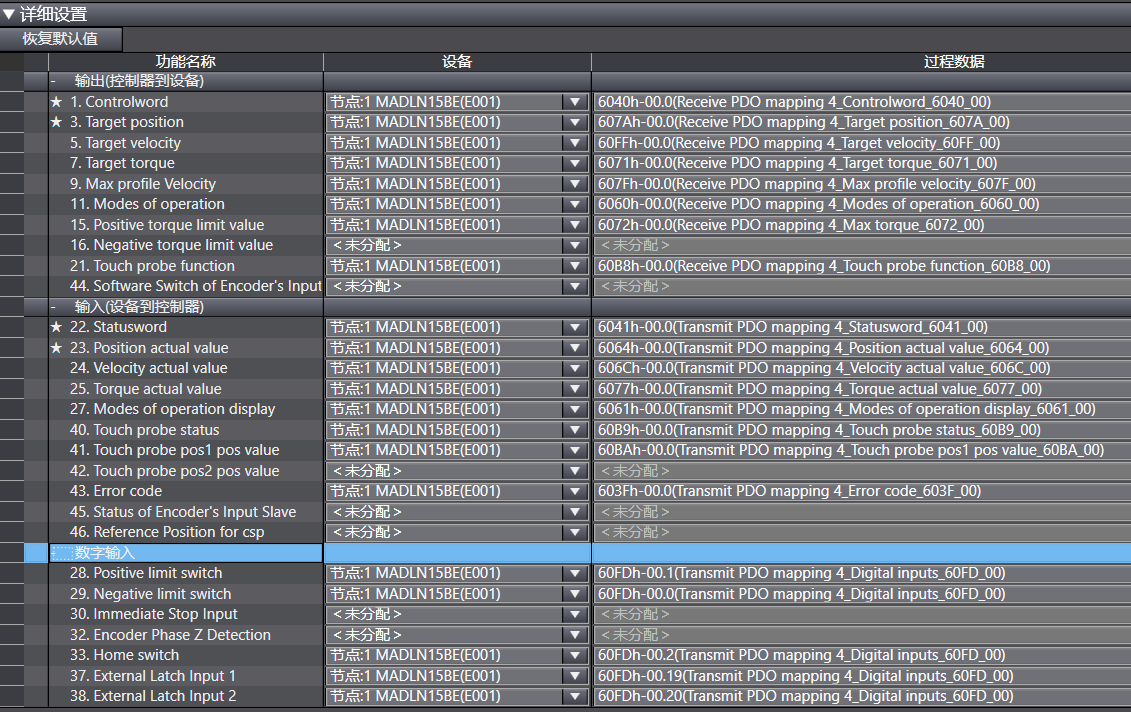 单位换算设置,电机转一周的行程可以选择不同单位,23位编码器2^23次方个脉冲转一周,也就是8388608份。 单位换算设置,电机转一周的行程可以选择不同单位,23位编码器2^23次方个脉冲转一周,也就是8388608份。  操作设置,将数值改小,不报错即可 操作设置,将数值改小,不报错即可 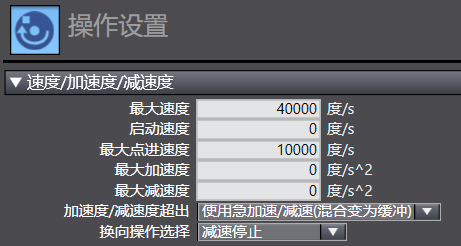 位置计数设置,选择绝对值编码器可以断点保持,增量编码器断店不保持 位置计数设置,选择绝对值编码器可以断点保持,增量编码器断店不保持 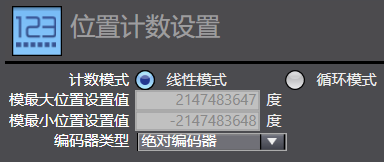
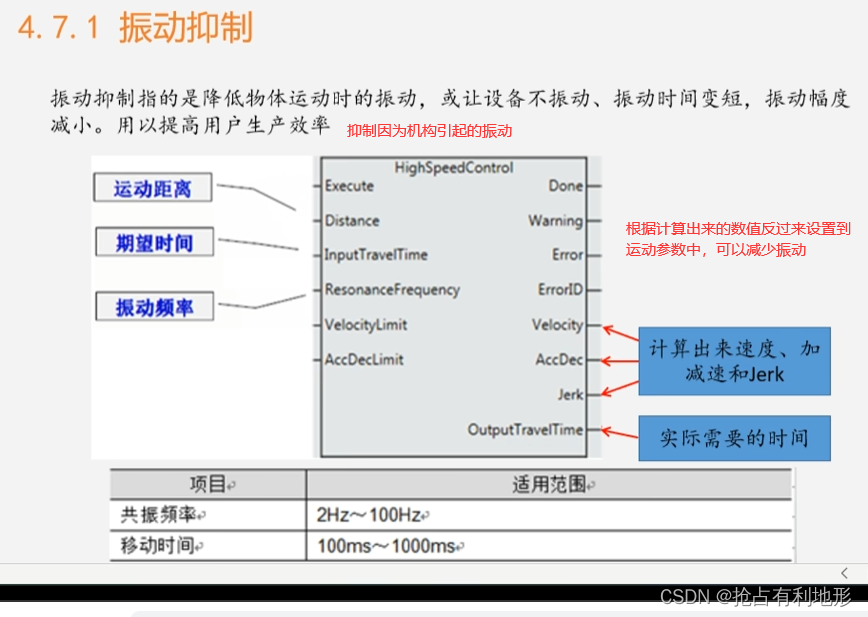
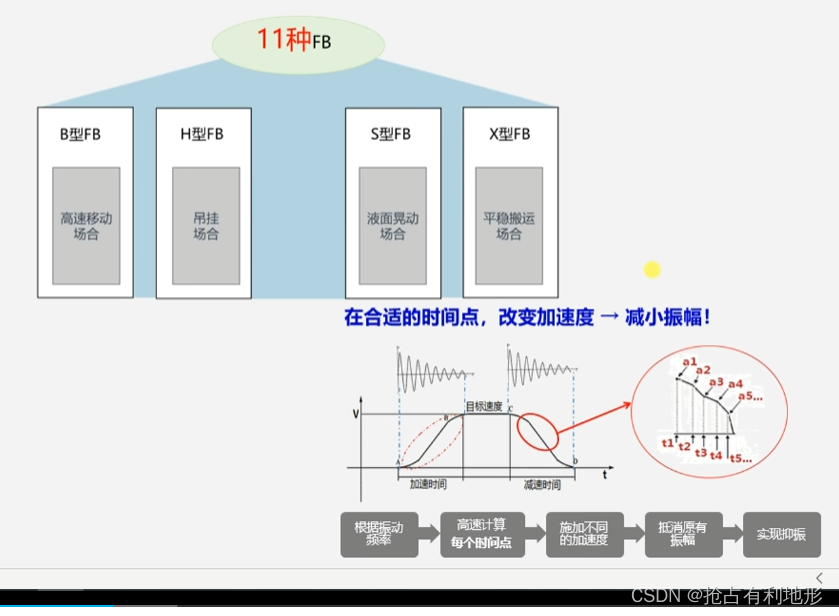
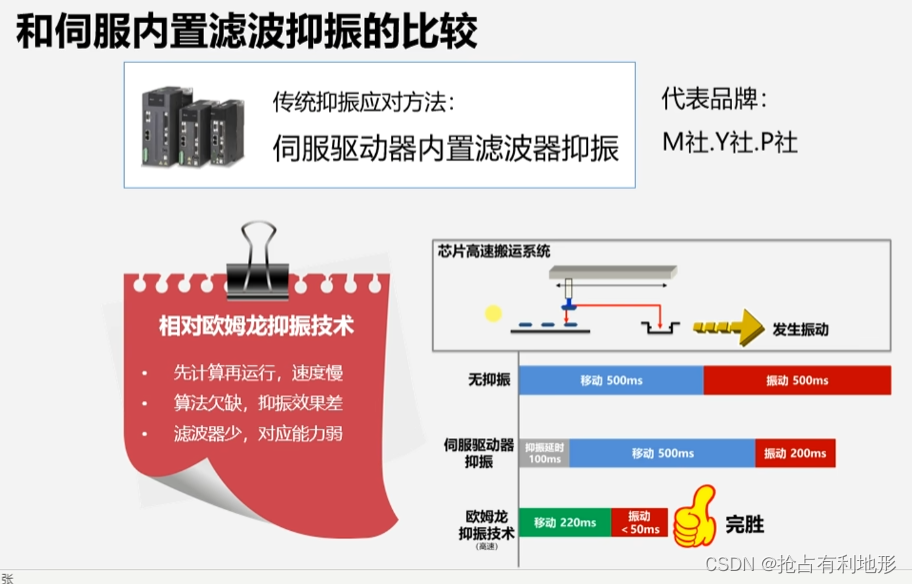
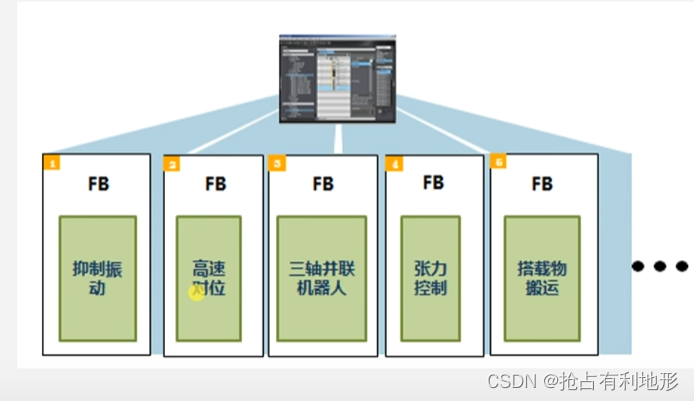
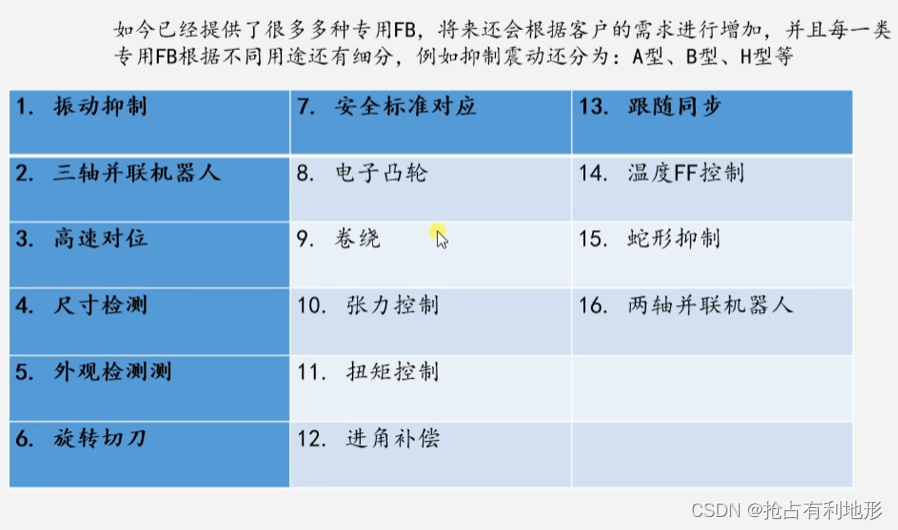
12.核心技术库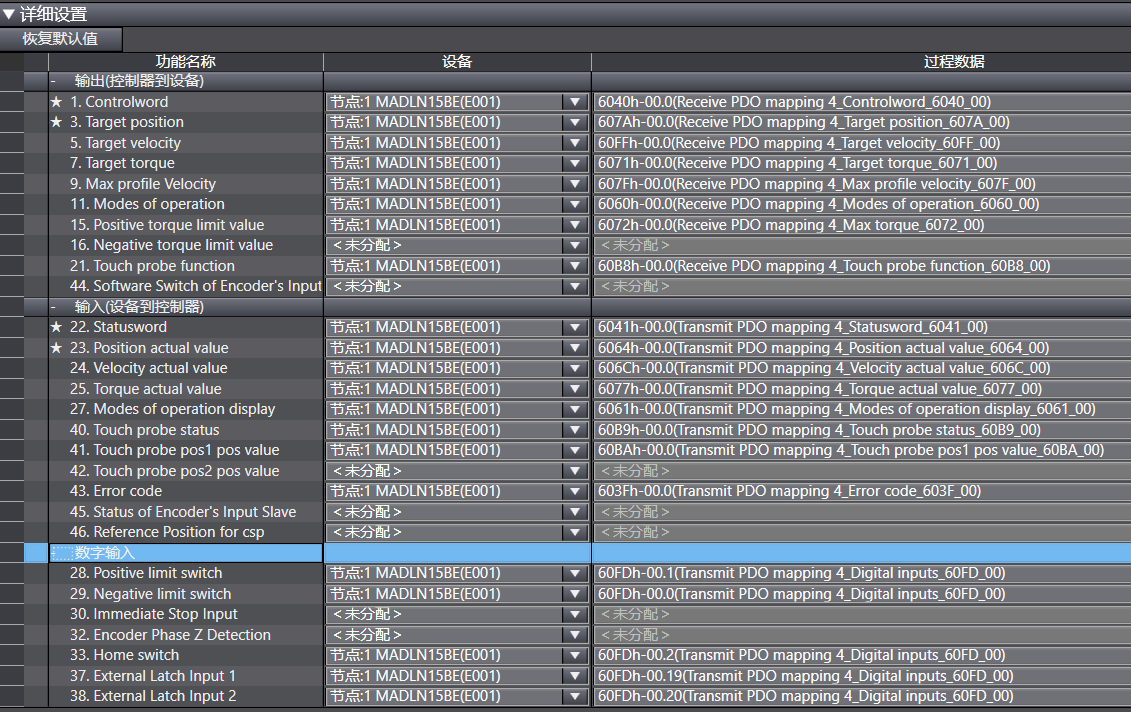 振动抑制:highSpeedController
振动抑制:highSpeedController
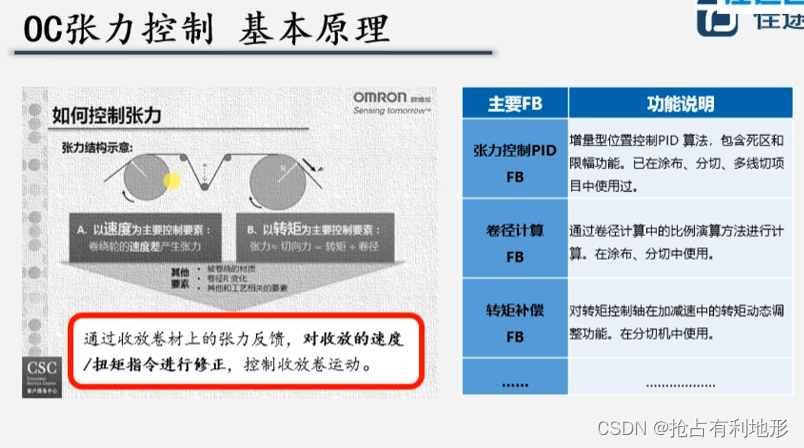
张力控制

13.凸轮应用及案例
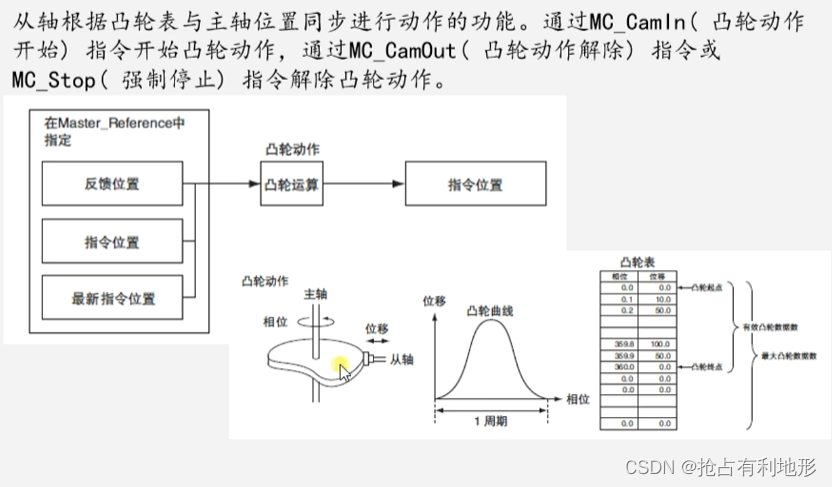 创建凸轮表 创建凸轮表  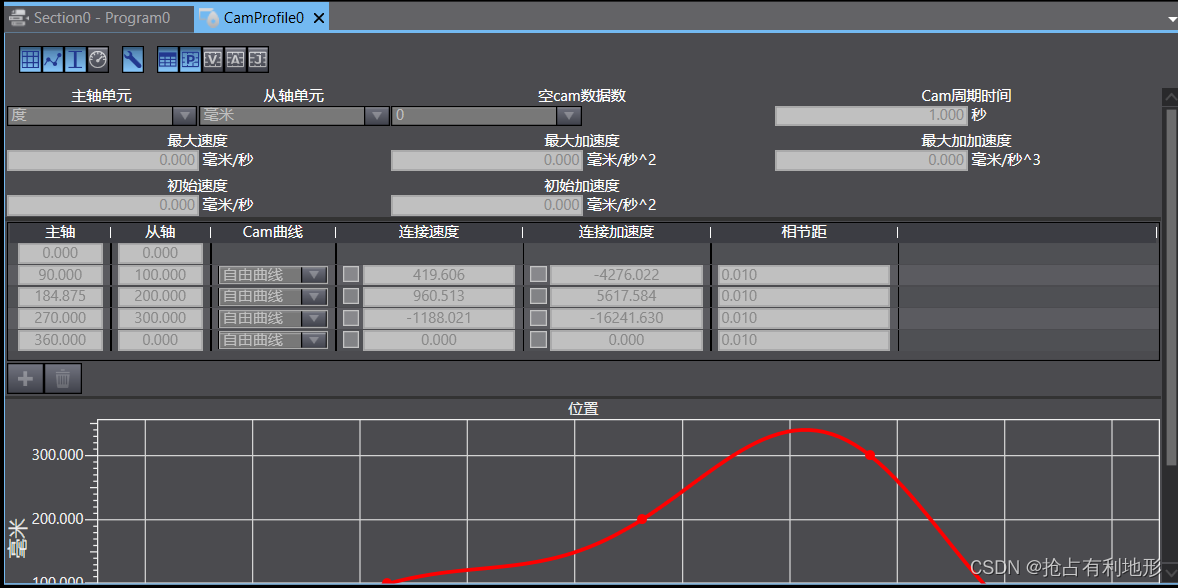
主从轴都伺服on。 用MC_MoveVelocity启动主轴。 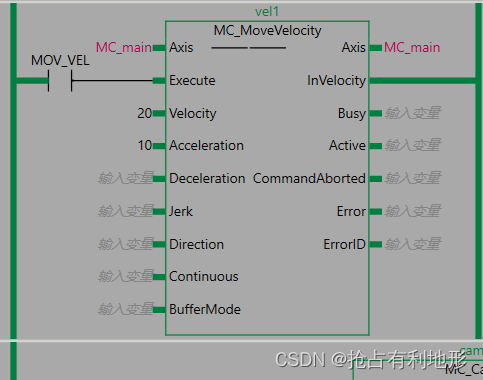 启动MC_CamIn。主轴设置循环模式,启动主轴再启动从轴,由于设置了StartMode,从轴会等到主轴到达StartPosition(0)再启动。 回到原点,启动从轴再启动主轴,由StartPosition设置与主轴位置相符,主轴和从轴会一起开始运动。 一般都先启动CamIn再启动主轴。 启动MC_CamIn。主轴设置循环模式,启动主轴再启动从轴,由于设置了StartMode,从轴会等到主轴到达StartPosition(0)再启动。 回到原点,启动从轴再启动主轴,由StartPosition设置与主轴位置相符,主轴和从轴会一起开始运动。 一般都先启动CamIn再启动主轴。 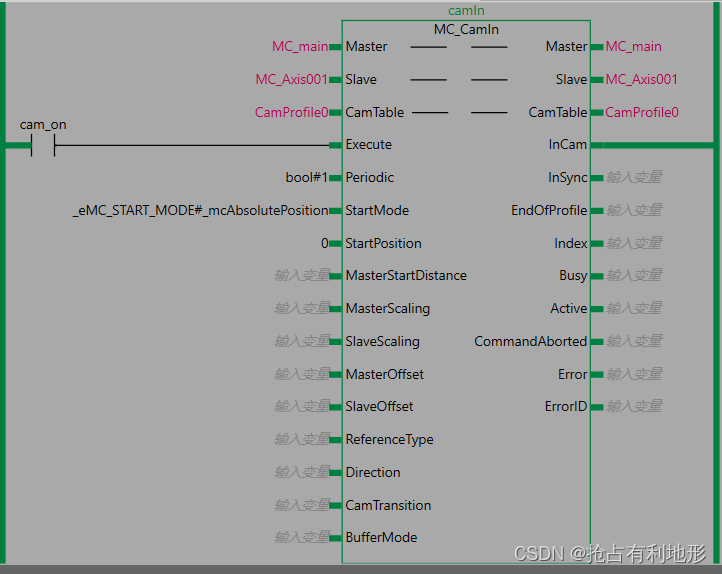
14.数据跟踪和3D仿真
14.1.数据跟踪
单个跟踪可以跟踪on、off的bool量,连续跟踪主要跟踪连续变化的数值。   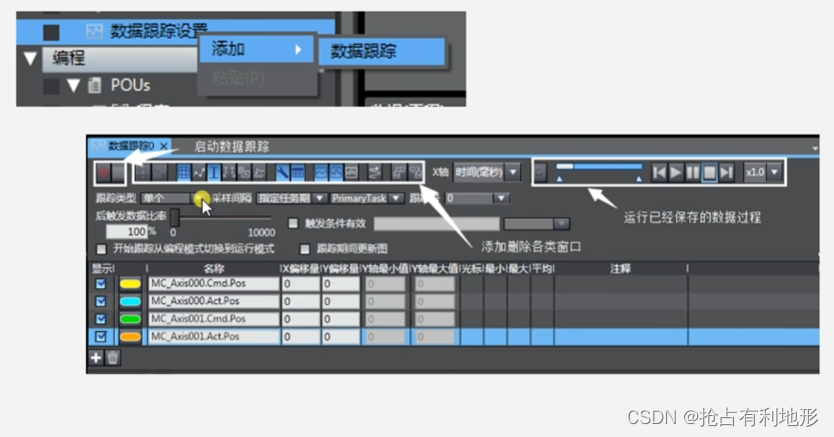
14.2. 3D仿真
15.机械手项目案例
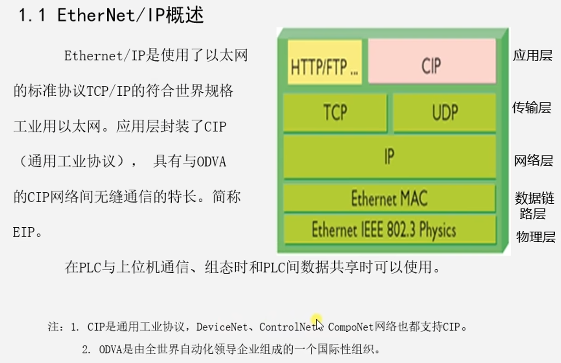
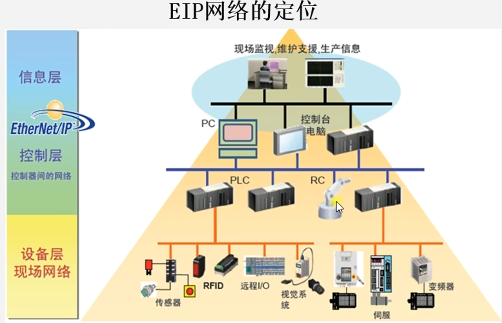
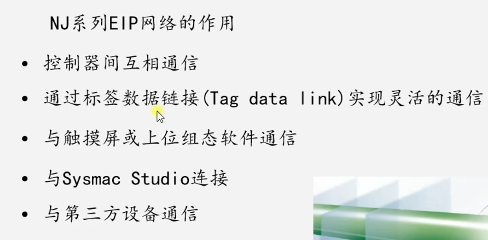
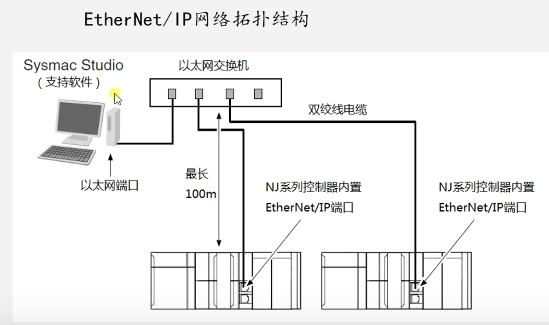
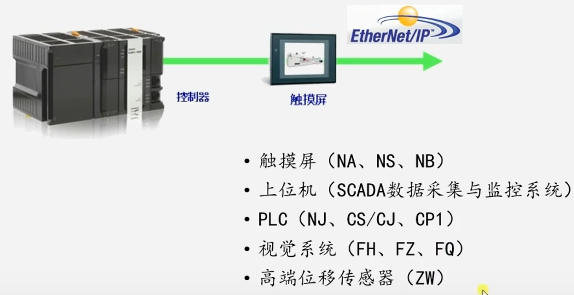
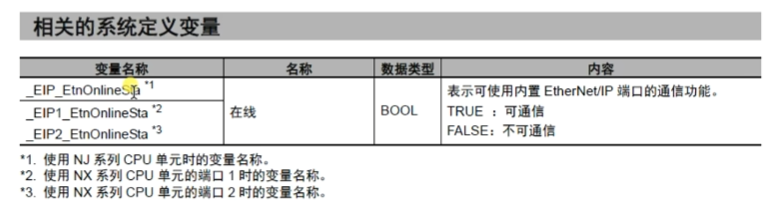
16.Ethernet/IP(P63/64)
       指示灯 指示灯   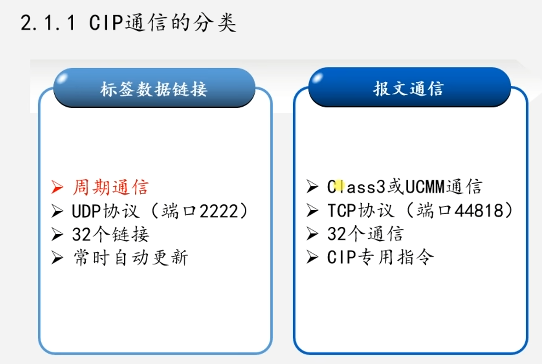   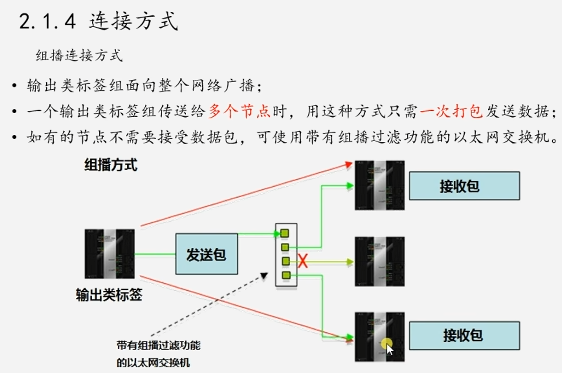 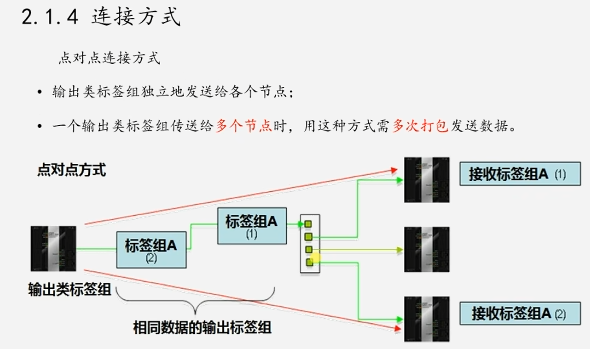 
p65、p66跳过
17.CIP报文通信
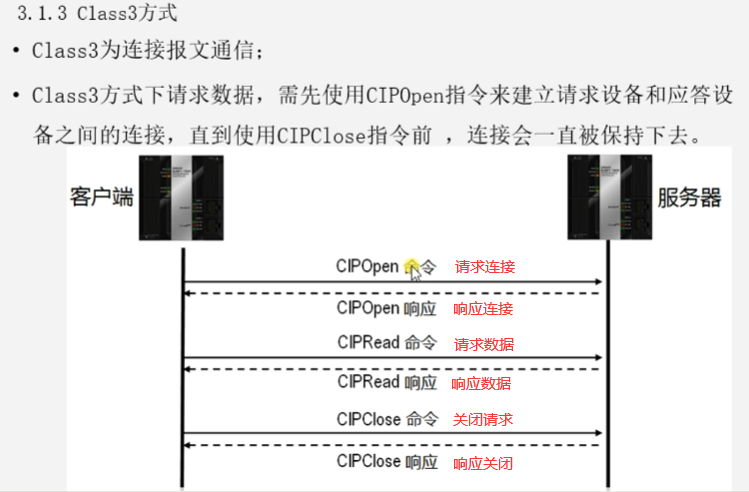
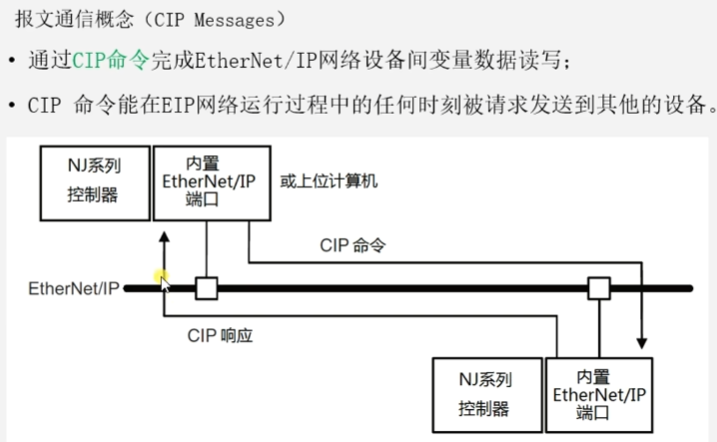 网络公开选项必须选择公开。 网络公开选项必须选择公开。 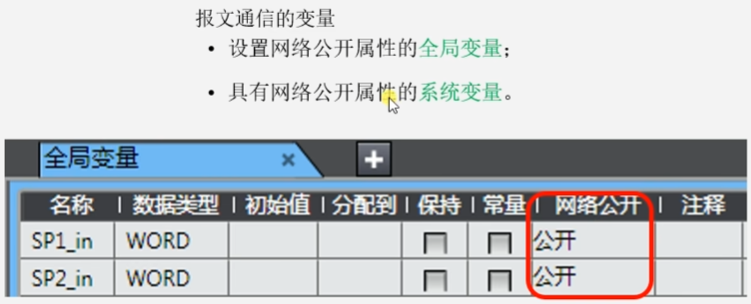 通信方式 通信方式 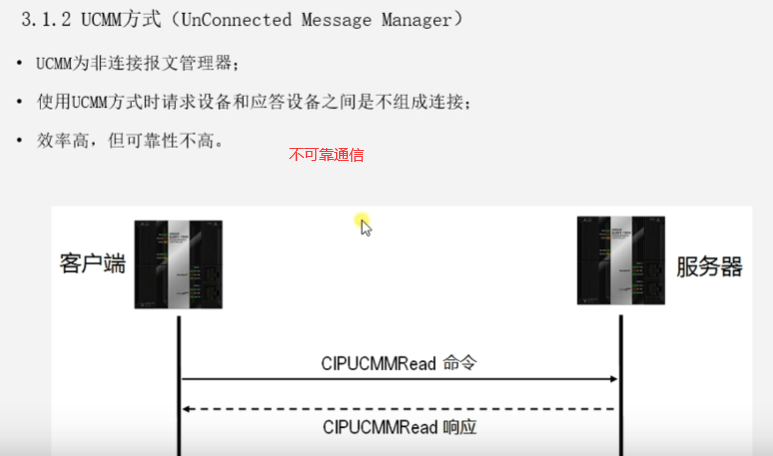
17.1.CIP通信指令
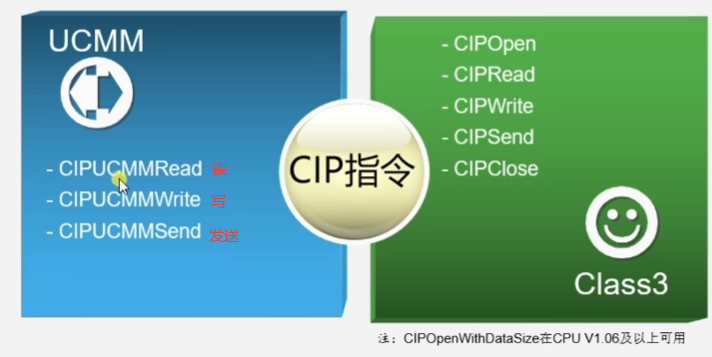  此处SrcDat为要读入的变量,若nx_data为数组,不能直接传入nx_data,要传入nx_data[0],才能被识别,DstDat同理。 此处SrcDat为要读入的变量,若nx_data为数组,不能直接传入nx_data,要传入nx_data[0],才能被识别,DstDat同理。 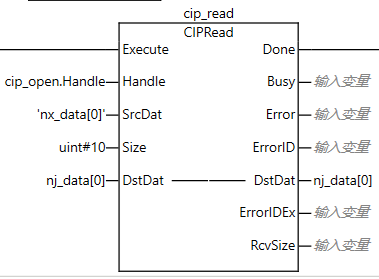
17.1.路由路径RoutePath
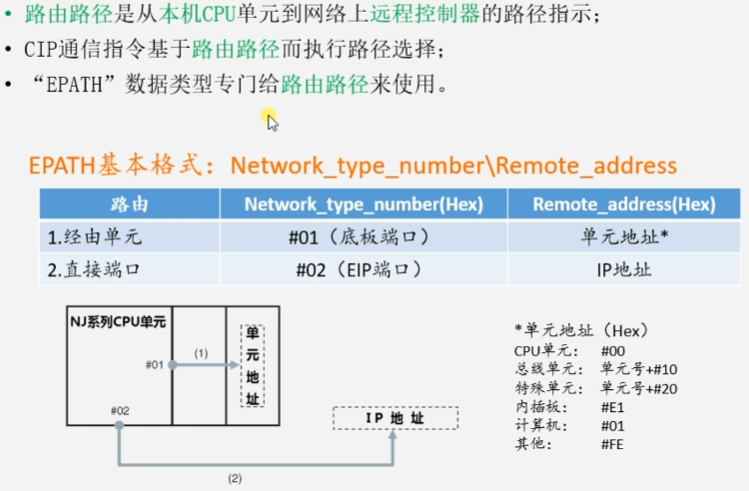 例 例 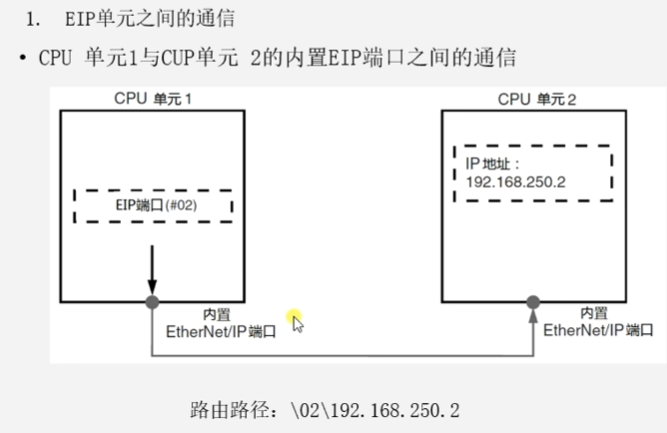 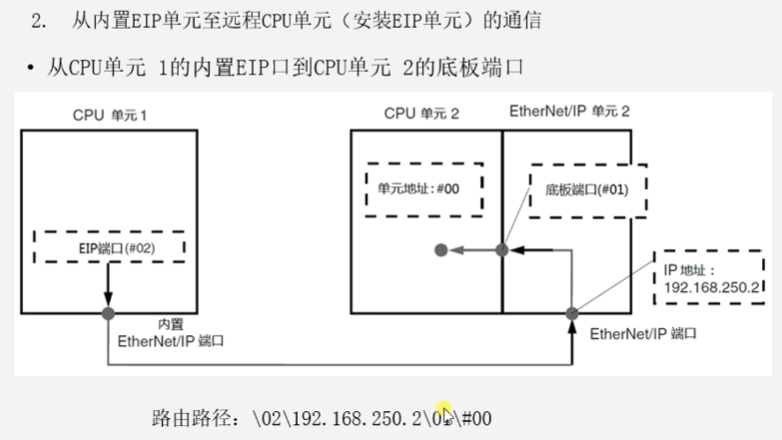 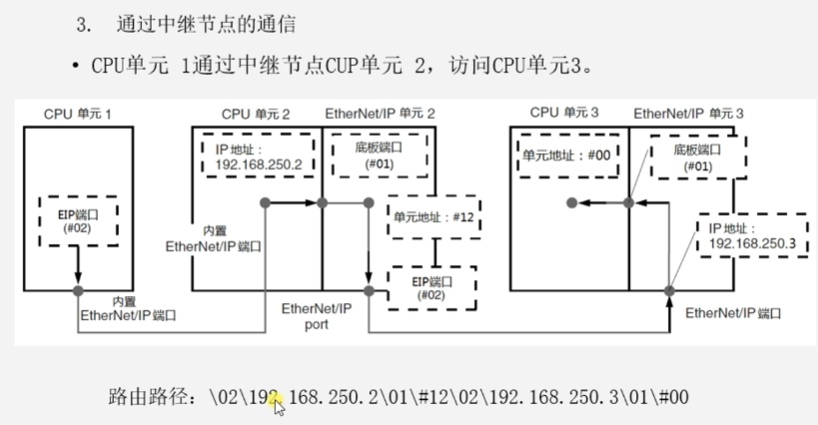 
18.NJ和触摸屏通信
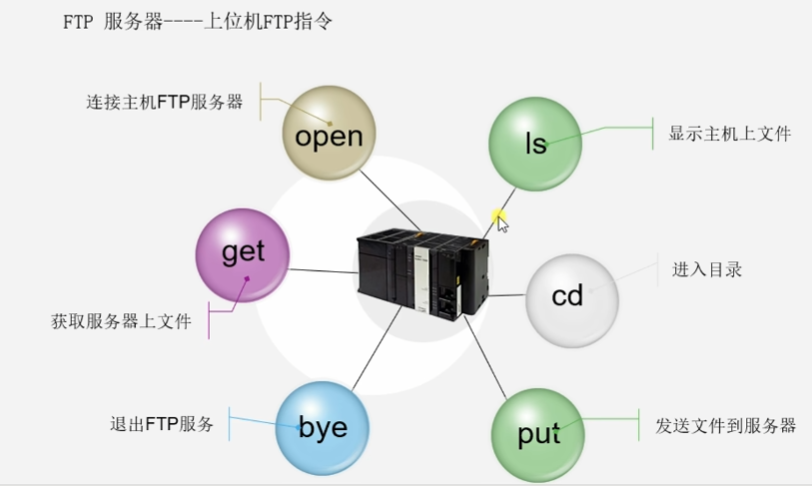
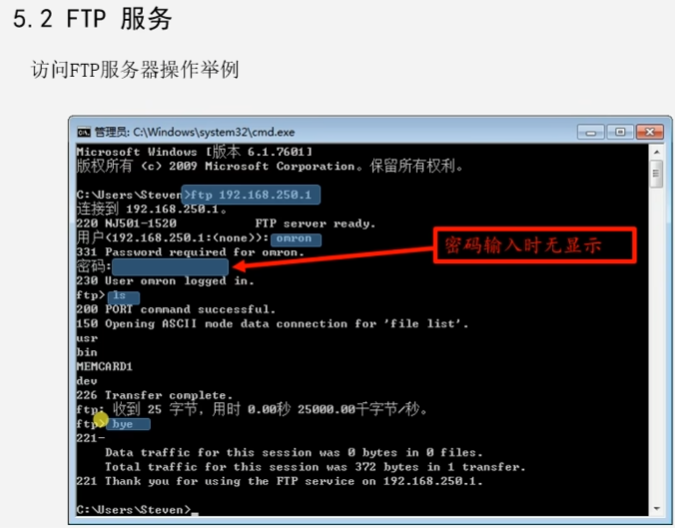
19.FTP服务和指令
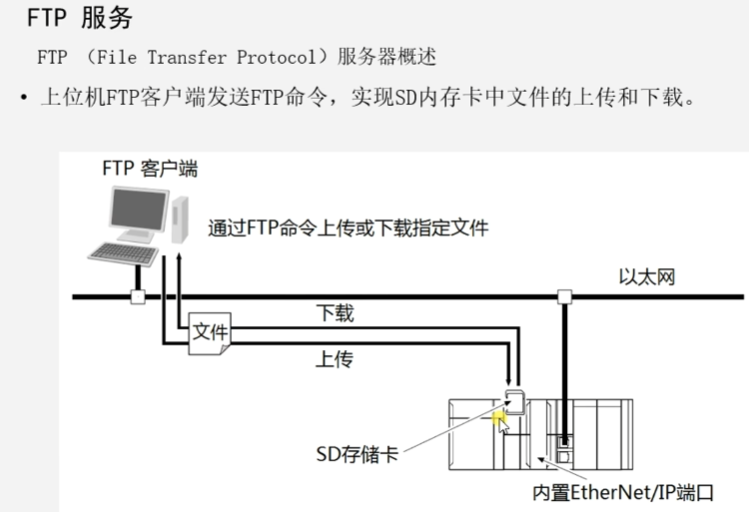  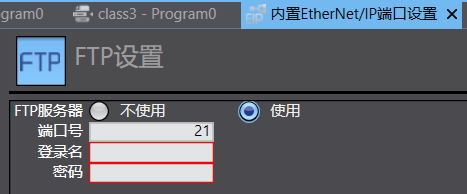   NJ1.80以上支持FTP客户端。 NJ1.80以上支持FTP客户端。 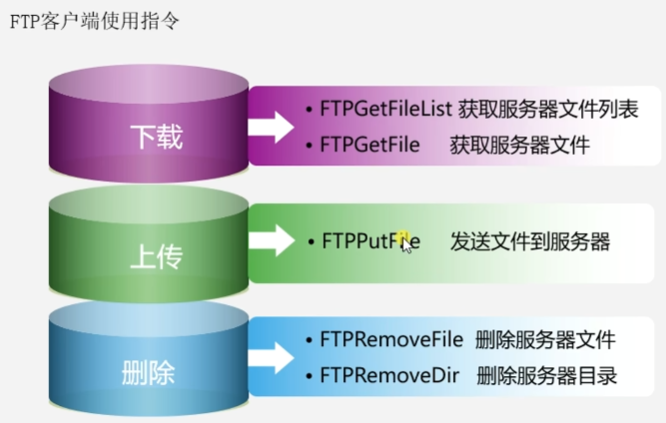
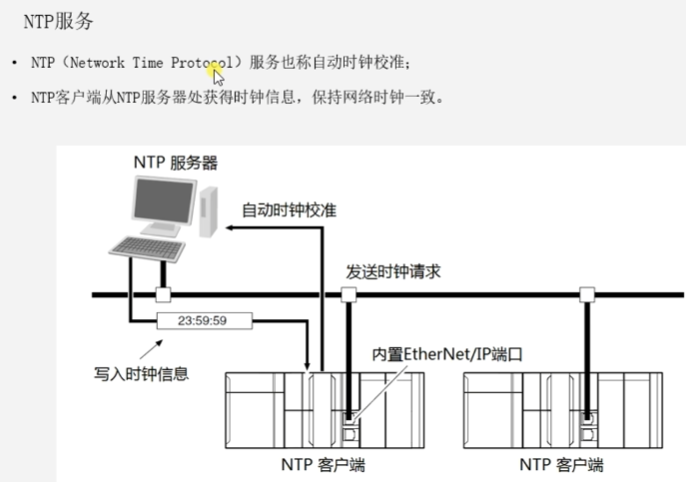
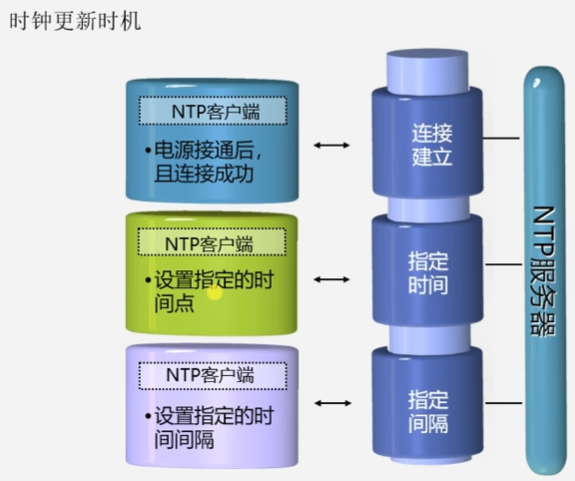
20.NTP与BOOTP服务
  BOOTP进行IP地址分配,保证网络利用的最优化 BOOTP进行IP地址分配,保证网络利用的最优化 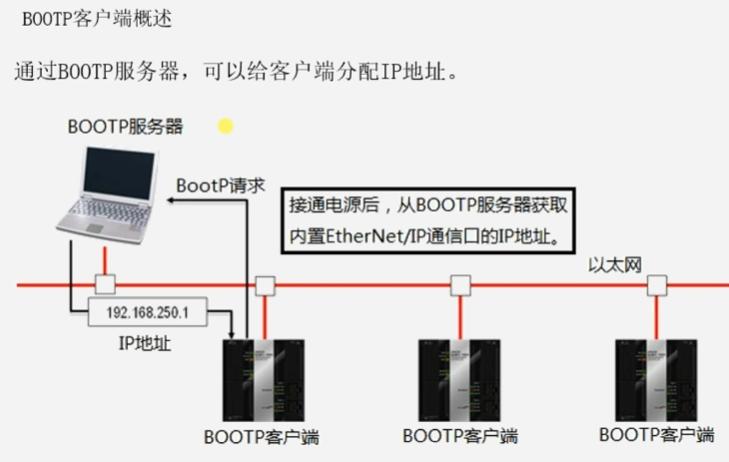
21.FINS通信
FINS命令有专门的手册。 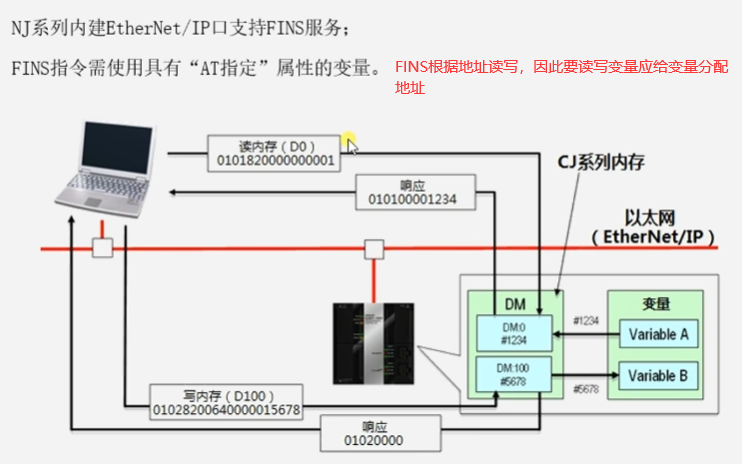 
|