舵机分类和控制原理简述(180°模拟电机)SG90 MG996R |
您所在的位置:网站首页 › 模拟云台协议通用 › 舵机分类和控制原理简述(180°模拟电机)SG90 MG996R |
舵机分类和控制原理简述(180°模拟电机)SG90 MG996R
|
—— 参考书目:《我的机器人 仿生机器人的设计与制作》罗庆生 北京理工大学出版社 舵机舵机是一种位置(角度)伺服的驱动器,最早用于航模,相当于廉价版的伺服电机,但仅保留了位置环,适用于那些需要角度不断变化并可以保持的控制系统,如机器人关节等(并非作为动力源)。从舵机中引出3条线,分别是PWM信号线和电源正负线。 https://www.zhihu.com/question/37374664/answer/167299936 步进电机、伺服电机、舵机的原理和区别 1舵机参数 扭矩:可理解为在舵盘上据舵机轴中心水平距离1cm处舵机能够带动的物体重量舵机功率:=速度×扭矩使用电压:4.8V/6V舵机类型:数字舵机/模拟电机转角角度:90°/180°/360°反应转速:指舵机转动的速度。此速度无法更改,一般为0.11s/60°~0.21s/60°(无负载情况下转过60°所需时间)。死区设定插头类型:JR/FUTABA结构材质:塑料齿/金属齿安装尺寸/重量:舵机功率与舵机尺寸的比值可理解为该舵机的功率密度
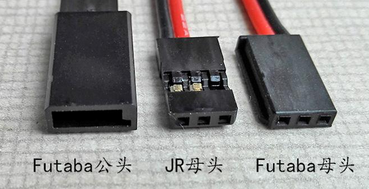
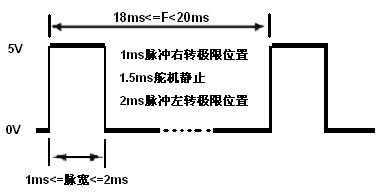
数字舵机和模拟舵机(RC伺服系统)的机械结构是完全相同的,其最大的区别体现在控制电路上,数字舵机的伺服控制器采用了数字电路(拥有MCU和晶振),而模拟舵机的控制器采用的是模拟电路。 模拟舵机需要给它不停的发送PWM信号,才能让它保持在规定的位置或者让它按照某个速度转动,数字舵机则只需要发送一次PWM信号就能保持在规定的某个位置。 数字舵机以高得多的频率向马达发送动力脉冲,相对与传统的50脉冲/秒(50Hz),数字舵机的频率是300脉冲/秒(300Hz),因此反应速度更快。 结论:数字舵机系统总体优于模拟舵机。 部分引用自 https://www.cnblogs.com/rayray/p/3479396.html 数字(数码)舵机和模拟舵机的区别 180度和360度舵机与普通直流电机的区别在于舵机只能在一定角度范围内转动。(数字舵机除外)通常舵机都有最大旋转角度。 180度舵机只能在0度到180度(±90度)之间运动,超过这个范围,舵机就会出现超量程的故障,轻则齿轮打坏,重则烧坏舵机电路或者舵机里面的电机。 360度舵机转动的方式和普通的电机类似,可以连续的转动,不过我们只可以控制它转动的方向和速度,不能调节转动角度。 其它驱动电路 舵机不需要专门配置驱动电路,其内部已经集成驱动电路,可以直接通过单片机IO口输出的PWM波来驱动舵机。 位置等级 舵机的位置等级通常为1024。 控制精度 控制精度=舵机转动角度/位置等级 180°/1024≈0.18° 脉宽控制精度 脉宽控制精度=基准周期信号/位置等级 20000us/1024≈20us 舵盘 3舵机工作原理 舵机结构舵机结构如下图所示,分为马达、减速齿轮组、电位器和控制电路。 电位器用于位置反馈。它会将其旋转后产生的电阻变化信号发送回控制电路,从而监控当前轴角度; 控制电路用来驱动电机和接收PWM控制信号和电位器反馈信号; 减速齿轮组用来放大马达的扭矩。齿轮有塑料齿轮、混合材料齿轮和金属齿轮。 部分引用自 https://www.cnblogs.com/zhoubatuo/p/6138033.html PWM波控制舵机总结 基本工作原理 闭环控制舵机是一个闭环控制系统。电位器是它的输入传感器,其阻值随舵机转动位置的改变而改变。在控制脉冲持续给定的情况下,通过控制电路读阻值并与控制脉冲比较就能调整电机的速度和方向,使电机向指定角度旋转并固定在该角度。(即位置环) 部分引用自 https://blog.csdn.net/weixin_42445727/article/details/80819340 舵机内部结及工作原理浅析 关于舵机的闭环控制还有另一种解释(从伺服电机角度出发,不知道是否适用于舵机,毕竟两者还是有区别): 伺服主要靠脉冲来定位,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移。 伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这和伺服电机接受的脉冲形成了呼应,这样系统可以通过比对收到和发出的脉冲数,实现对电机转动的精确控制。 180°舵机以模拟电机为例。 舵机的伺服系统由可变宽度的脉冲来进行控制(PWM)。 舵机内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号(50Hz,脉冲频率指每秒钟发送脉冲的个数),该信号定义的位置为舵机转角的中间位置(±90度);控制舵机的脉冲信号高电平部分范围为0.5ms到2.5ms,其中0.5ms为最小值,2.5ms为最大值。舵机的角度由连续发送的控制信号脉冲所产生,脉冲持续时间长短决定脉冲转动的角度(脉冲编码调制,PCM)。脉冲必须持续发送才能稳定舵机的角度,有限的外力影响将不会让舵机角度产生变化。当脉冲停止发送时,舵机会停在当前位置而不会自动复位,此时外力可改变舵机角度。 受PWM外部控制信号频率限制,最快20ms才能对舵机摇臂位置做新的调整。 脉冲宽度决定舵机的正反转:当舵机接收到一个小于1.5ms的脉冲,输出轴会以中间位置为标准,逆时针旋转一定角度;接收到的脉冲大于1.5ms情况相反。 即PWM信号与基准信号相比较。 脉冲宽度决定舵机的转动角度:PWM信号通过信号线进入控制电路,获得直流偏置电压。将获得的直流偏置电压与电位器的电压比较,获得电压差值,将这个差值加到电机上控制舵机转动。 即PWM信号与电位器信号相比较。 控制电路向电机传送动力脉冲,电机通过级联减速齿轮带动电位器旋转,当电压差为0时,电机停止转动。舵机的输出功率与它所需要转动的距离成正比。如果输出轴需要转动很长的距离,控制电路就会发送最大宽度的动力脉冲使马达全速运转;如果它只需要短距离转动,马达就会以较慢的速度运行(速度比例控制),这意味着如果有一个比较小的控制动作,舵机就会发送很小的初始动力脉冲到马达,马达的反应会非常迟钝或者根本就没有反应(模拟电机缺陷)。当到达指定的位置,控制电路发送的动力脉冲就会减小脉冲宽度,使马达减速直至停止。 180°舵机 0.5ms----------------0度; 1ms -----------------45度; 1.5ms----------------90度; 2ms -----------------135度; 2.5ms ---------------180度; 部分引用自 https://www.basemu.com/servo-angle-control-principle.html 秒懂舵机角度控制原理 https://blog.csdn.net/pang9998/article/details/103200666 舵机使用基础 —— 360°舵机0.5ms----------------正向最大转速; 1.5ms----------------速度为0; 2.5ms----------------反向最大转速; 部分内容转自https://blog.csdn.net/yx1302317313/article/details/80378037 180度舵机与360度舵机 —— 通过单片机系统输出PWM信号可实现对舵机输出转角的控制,在此之前单片机首先需产生基本的PWM周期信号(通常为20ms的周期信号);其次单片机能调整占空比。单片机可控制一路或多路舵机。 附录一 常见的几种舵机 SG90注意产品上标明的“9g”指该舵机质量为9克。 常用性能参数 尺寸:21.5mmX11.8mmX22.7mm 重量:9克 无负载速度:0.12-0.13秒/60度(4.8V) 0.002s/度 堵转扭矩:1.6kg/cm(4.8V) 工作电压:3V-7.2V 死区设定:5us 角度偏差:回中误差0度, 左右各45°误差≤3°。 接口规格: JR/FUTABA通用 连接线长度: 250mm MG996R
常用性能参数 尺寸:40.8* 20* 38mm 重量:55g 无负载速度:[email protected]/60°(4.8V)or 0.19sec/60°(6V) 扭矩:13kg/cm(4.8V) or 15kg/cm(6V) 电压:4.8V-7.2V 响应脉宽时间: ≤5usec 角度偏差:回中误差0度, 左右各45°误差≤3°。 接口规格: JR/FUTABA通用 连接线长度: 300mm 附录二 由舵机组成的云台
|


 最常用的模拟舵机,塑料外壳加塑料齿轮组,体积小巧,性能薄弱。转动角度为90°/180°。
最常用的模拟舵机,塑料外壳加塑料齿轮组,体积小巧,性能薄弱。转动角度为90°/180°。 最常用的模拟舵机,性能强于上者,适用于大多数情况,但是体积也增大许多。 转动角度有180°/360°
最常用的模拟舵机,性能强于上者,适用于大多数情况,但是体积也增大许多。 转动角度有180°/360° 这种简易云台通常由两台舵机组成,设备被固定在平台最上端,底层舵机用于左右旋转,上层舵机用于控制仰角。选购时需注意舵机尺寸是否与云台兼容。
这种简易云台通常由两台舵机组成,设备被固定在平台最上端,底层舵机用于左右旋转,上层舵机用于控制仰角。选购时需注意舵机尺寸是否与云台兼容。【本文地址】
今日新闻 |
推荐新闻 |