【综述】智能货运船舶研究现状与发展思考 |
您所在的位置:网站首页 › 梦见驾船航行 › 【综述】智能货运船舶研究现状与发展思考 |
【综述】智能货运船舶研究现状与发展思考
|
1货运船舶的特点 目前已投入实用的“无人艇”,即具备一定自主航行智能的小型水面艇,在测绘、侦查、搜救、水文勘察等领域有较好的研究与应用基础[7],其实现方法与无人机、无人车类似,具备“小、快、灵”的特点。 然而, 无人艇的自主航行智能无法直接向货运船舶移植。其主要原因在于,货运船舶具有吨位大、速度慢、操纵性弱、惯性大等特点,是典型的欠驱动体。因此,货运船舶的自主航行需要适应巨大的惯性与规则约束,其智能航行的难度远高于小型无人艇,主要体现在以下 2 个方面。 1) 货运船舶航行状态操控复杂。 当前,货运船舶普遍采用柴油机动力系统,这一动力系统的构成复杂、传动响应慢;用倒车代替制动手段,无法直接刹车。航行过程中的风、浪、流等环境因素会对船舶的运动产生干扰[8-9],导致简单的“避让”、“最短”原则规划出的航行路径往往无法实用。 因此,尽管已经有了“自动舵”这样的产品可以帮助船舶驾驶员锁定航向,但船舶驾驶员还是需要通过多年的实践,才能理解和掌握货运船舶的“操控特性”。 2) 影响货运船舶自主航行决策的因素多。 除避碰需求外,货运船舶还需关注较大范围内临近船舶的动态,通过甚高频语音等方式的沟通,了解其他船舶的航行意图与变化,为会遇做准备。此外,“路径规划”的选择还要受到航行规则、操作难度、经济性的约束[10]。例如,货运船舶倾向于匀速直线行驶,大幅度转弯和变速均会影响航行的经济性,显著增加油耗。 船舶的航行规则与惯例,也会偶尔自相矛盾,例如“小船让大船”、“空载船让重载船”这 2 条惯例有时候就会产生冲突。因此,货运船舶的“路径规划”决策更多时候是“利害”的风险权衡问题。船舶驾驶员需经过多年的实践,才能在安全性、合理性、经济性中做出正确选择。 2 智能货运船舶发展现状 2.1 国外发展现状 早在 20 世纪 60 年代,IBS 就被发明出来了,该系统作为船舶的重要设备之一,被沿用并不断得到发展[11]。IBS[12] 可以帮助船上及岸上人员监控、操纵船舶,处理和分析船舶各个设备传来的信息,对船舶具有重要意义,可以认为 IBS 就是智能航行系统的雏形。 2005 年,英国交通部首次提出了 “电子航海”(e-Navigation)这一名词;2006 年 5 月,在国际海事组织(IMO)海上安全委员会第 81 次会议上,通过了日本等 7 国提出的有关 e-Navigation 的新项目 。e-Navigation 的构想是:通过整合船岸信息,提高船舶航行安全和效率[13]。从设计理念上看,船舶本身的智能化程度并没有得到显著提高,但其构建的船-岸航运系统可以为货运船舶的航行提供更多的服务支撑。 2010~2013 年,韩国现代重工分别制定了“智能船 1.0”和“智能船 2.0”计划[16]。其设计理念是:借助信息通信技术 ,实现船端与岸端的信息融合,以提高船舶安全性、环保性、经济性,同时衍生船舶附加服务[17]。 日 本 于 2014 启 动 了 “ 智 能 船 舶 应 用 平 台”(smart ship application platform, SSAP)项目 ,该项目由 27 家单位共同参与,旨在建立船舶设备数据的标准化方法 ,不断提高船舶的安全性和环保性。基于该项目,日本提出了《船载海上工况数据服务器》和《船载机械和设备标准数据》这 2 项国际标准,并获得了通过[18-19](图 1)。
图 1 日本提出的国际标准[19] 英国的罗尔斯·罗伊斯 (Rolls-Royce)公司在2014 年 就 开 始 研 发 名 为 “ 未 来 操 作 体 验 概 念 ”(future operator experience concept) 的岸基遥控系统。2016 年 3 月,该公司又与芬兰阿尔托大学等单位合作启动了“ 高级自主海上应用”(advanced autonomous waterborne applications, AAWA)项目 ,拟于 2020 年前推出无人近海货轮产品[20-22]。图 2所示为 AAWA 项目概念图。
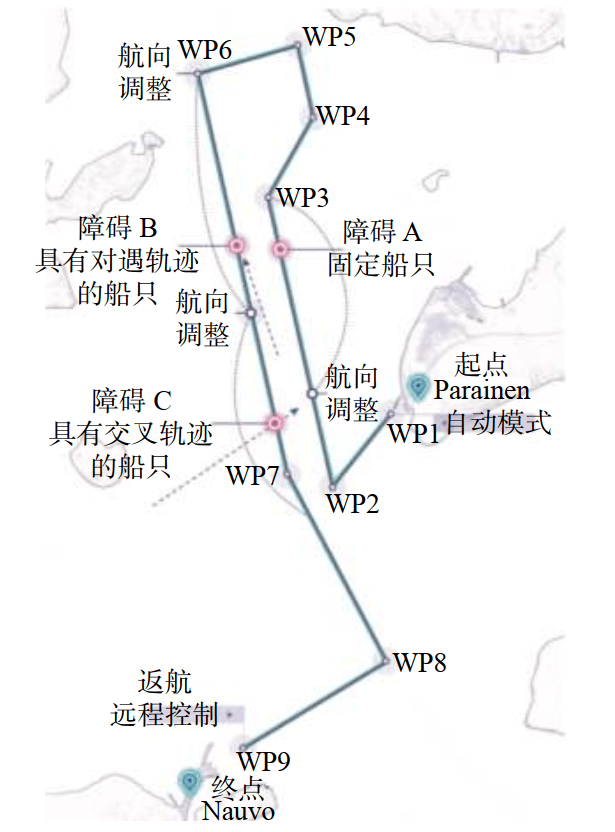
图 2 AAWA 项目概念图[22] 2017 年 3 月,罗尔斯·罗伊斯公司与瑞典 Stena Line 渡船公司签署协议[23],合作研发用于渡船的船舶智能感知系统,目的是实现传感器信息融合与分析,提高环境感知度,以使船舶的操作运行更加简便、安全、高效。 2018 年 12 月 3 日,罗尔斯·罗伊斯公司联合芬兰 Finferries 公司成功完成了 Falco 号汽渡船的自动航行试验[24]。该渡船按设定的路线(图 3)从Parainen 出发,途经 WP1~WP9,航行到 Nauvo,并通过远程驾驶返航。该试验主要展示了罗尔斯·罗伊斯公司在远程驾驶、自动避碰、自动靠泊等方面的研究成果。
图 3 Falco 号汽渡船的试验路线[25] 2.2 国内发展现状 2013 年,原中国船舶工业集团公司系统工程研究院与美国国家科学基金会智能维护中(intelligent maintenance systems, IMS)联合成立了“海洋装备信息智能管理与应用技术创新中心”[26],用以推动智能船舶相关核心技术和产品的研发 。 2015 年 9 月,该研究院与招商局能源运输股份有限公司签订了开展“船舶智能化、航运智能化”的战略合作协议,拟在新造船舶上开展智能化技术的试点应用,探索大数据时代航运信息化之路。2015 年 12 月 1 日,原中国船舶工业集团公司发布了 名为 i-DOLPHIN 的智能示范船,这是我国首艘进入建造阶段的智能货运船舶。 2015 年 12 月,中国船级社颁布了 《智能船舶规范》[27],该规范对智能船舶的有关功能,即智能航行、智能船体、智能机舱、智能能效管理、智能货物管理和智能集成平台进行了概念描述,达到相应规定的船舶可申请相应的智能船舶附加标志。 2017 年 6 月,武汉理工大学智能交通系统研究中心启动了 船舶安全辅助驾驶系统项目。该项目针对汽渡船舶穿越航道、在不良天气下运行等航行特点,以及汽渡船舶对自身状态感知、周围航行环境感知、碰撞风险预警等需求,研制了一套汽渡安全辅助驾驶系统,并于 2018 年 7 月在南京板桥汽渡船上安装运行[28]。图 4 为南京板桥汽渡船的安全辅助驾驶系统运行界面。
图 4 南京板桥汽渡船的安全辅助驾驶系统运行界面 2018 年 2 月 10 日 ,珠海市政府 、中国船级社、武汉理工大学和云洲智能科技有限公司共同启动了 珠海万山无人船海上测试场建设项目[29]。该项目拟建设数值仿真测试场、模型船测试场和实际航运环境测试场,实现无人船智能航行等多方面的测试,同时,可以对不同吨位船舶的智能等级进行有针对性的测试。 2018 年 4 月,武汉理工大学联合船舶设计与制造、航运、新能源等研究机构和企事业单位,成立了“ 智能新能源船舶技术创新产业联盟”。该联盟旨在推进我国智能新能源船舶的技术创新和产业化,实现联盟成员的技术合作、项目合作和信息共享,建设成为智能新能源船舶技术的“产、学、研、用”合作平台和军民融合创新群体。 2018 年 12 月,工信部、交通运输部和国防科工局联合发布了《智能船舶发展行动计划(2019~2021 年)》,该行动计划对加快产业布局,加强跨界融合,增添发展新动能,促进我国船舶工业高质量发展具有重要意义。 2019 年 5 月,交通运输部等七部门联合发布了 《智能航运发展指导意见》,明确了未来 30 年我国智能航运发展远景、主要任务和保障措施,有利于进一步加快高新技术与航运要素的深度融合,培养和发展智能航运新业务。 3 智能货运船舶技术展望 普遍认为,智能货运船舶的发展必将经历 增强驾驶、远程驾驶、自主驾驶等发展阶段[30-31]。与此同时,需要相关的关键技术支持其发展阶段的实现。下面,将从 智能航行、智能机舱和远程驾驶等技术方面展望智能货运船舶的发展。 3.1 智能航行技术 1) 自主航行。 船舶自主航行技术并非一蹴而就。要实现自主航行,首先需要感知船舶外在环境和船舶运动信息,建立类人理解模型,解释航行要素,分析风险级别;其次,需要规划航线,制定航行策略;最后,设计航行控制器以实现对船舶的航行控制。 因 此 , 自 主 航 行 的 功 能 发 展 应 分 为 6 个 等 级:0 级 ,常规驾驶 ,无任何智能功能 ;1 级 ,增强驾驶,利用传感器融合技术,提高感知信息获取能力及效率;2 级,辅助驾驶,能够提供驾驶决策供参考;3 级,船端人船协同,船上人员协同自主驾驶的智能船舶;4 级,岸端人船协同,岸端人员协同自主驾驶的智能船舶;5 级:自主驾驶,由智能船舶自主驾驶。 目前,船舶处于搭载大量驾驶辅助系统的增强驾驶阶段。智能船舶发展的最终目标是自主驾驶,然而,在此之前的一段时间内,智能船舶将处于远程驾驶阶段,即船舶主要运行于自主驾驶状态,复杂工况下,远程驾驶中心将接管船舶。船舶自主驾驶问题复杂,涉及信息感知、态势认知、航行决策多个维度,需要逐一深入研究解决。 2) 靠离泊与锚泊。 靠离泊和锚泊属于船舶航行中的典型复杂工况,长期来看,靠离泊和锚泊可以实现无人化。无人靠离泊可以借助码头真空吸力设备以及拥有动力定位的无人船实现,而锚泊则需要借助自动锚泊机替代人工锚泊。但在此之前,无论是靠离泊还是锚泊,都将经历由远程操作实现的阶段。 3.2 智能机舱技术 1) 船舶动力。 当前货运船舶大多采用柴油机作为原动力,经过齿轮箱、轴系等装置,带动螺旋桨转动,从而驱动船舶前进,部分船舶的柴油机还担负全船发电的任务。然而,基于柴油机、齿轮箱、轴系的动力系统结构复杂,实现自动控制的难度大,监控系统复杂。 为了实现船舶自主驾驶甚至是无人驾驶,需要为智能船舶设计新的动力形式。电力推进可控性好,可以实现无级调速,符合智能船舶的要求, 预计电力推进将会逐渐取代货运船舶现有的动力形式。然而,电力推进仍然存在一些技术难题需要攻克,包括大功率电动机技术、大容量电池/电容技术、电力驱动下的船舶电网技术以及无轴轮缘驱动技术等。 2) 机舱监控。 船舶机舱监控的内涵与船舶机舱设备类型密切相关,当前船舶机舱监控对象包括:主机、辅机、轴系以及其他机舱设备。电力推进的机舱监控的主要任务是监控驱动电机、电池/电容、船舶电网系统的状态,并在此基础上评估、预测系统可靠性,实现智能运维。 另外, 机舱监控中数据采集多采用可编程逻辑控制器(programmable logic controller, PLC)设备作为核心,虽然其具有稳定可靠的性能,然而 PLC技术主要被国外企业掌握。智能船舶作为全球争相发展的前沿技术,研发具有自主知识产权的机舱监控系统意义重大。 嵌入式技术具有可靠、廉价、易编程等特点,将有可能成为智能机舱监控系统的另一个选择。 3.3 远程驾驶技术 1) 岸基控制中心。 岸基控制中心既是远程驾驶过程中的驾控中心,也是自主驾驶过程中的监管中心。远程驾驶监管的核心是环境再现,包括船舶自身状态以及航行态势可视化。环境再现服务于岸基驾控和监管,可以借助虚拟现实(virtual reality, VR)技术实现。而智能货运船舶的信息感知与认知技术是环境再现的关键。另外,由于远程驾驶不同于传统船舶驾驶,其运行机制、培训方法和职业资格认定等均有待研究。 4 智能货运船舶的发展思考 智能货运船舶的发展不仅涉及技术层面的问题,而且还涉及市场接受度、社会适应性以及法律法规等问题。基于多方面的因素,对智能货运船舶的发展提出以下几点思考: 1) 智能货运船舶的技术实现应该按照“先内河运输,再沿海运输,最终远洋运输”的方向逐步开展。其原因在于,在现阶段,船岸协同技术支撑下的内河运输船舶智能航行更加具有可行性。另外,在内河船舶自主航行过程中,一旦发生故障,可实施有效救助。 2) 智能货运船舶的技术内涵包括感知、决策和控制。就目前而言,大力推动货运船舶感知增强技术的发展,研发适用于不同航行环境条件的提升船舶通航能力和安全性的保障技术,是当前航运业的迫切需求。 3) 大力开展智能货运船舶的市场接受度、社会适应性以及法律法规等研究,十分重要。调研航运业当前需求 ,积极推广智能货运船舶的概念 ,并根据行业需求调整智能货运船舶功能模块,才能研发出市场接受度高、社会适应性强的智能货运船舶产品。 4) 选择相对固定的航线和特定的运输任务进行研究更为可行。例如研究渡轮、岛屿间点对点的运输,其航行环境相对固定,易于工程实现,同时,建立的智能货运船舶平台可以积累大量有价值的数据。 5) 货运船舶的智能航行是涉及船舶设计、动力组成、状态感知、信息处理、通信控制、风险辨识、人工智能等多学科交叉的研究领域,需要多学科的技术攻关,货运船舶的智能航行才能真正实现。 引 用 本 文 引用本文: 严新平, 王树武, 马枫. 智能货运船舶研究现状与发展思考[J]. 中国舰船研究, 2021, 16(1): 1–6. Citation: YAN X P, WANG S W, MA F. Review and prospect for intelligent cargo ships[J]. Chinese Journal of Ship Research, 2021, 16(1): 1–6. “ [1] 严新平, 王树武, 马枫. 智能货运船舶研究现状与发展思考[J]. 中国舰船研究, 2021, 16(1): 1–6. [2] 高泽宇, 张鹏, 张博深, 张跃文, 孙培廷. 智能船舶动力系统设备的自适应阈值方法 . 中国舰船研究, 2021, 16(1): 168-174. [3] 王凯, 胡唯唯, 黄连忠, 蔡玉良, 马冉祺. 船舶智能能效优化关键技术研究现状与展望 . 中国舰船研究, 2021, 16(1): 181-192, 199. 摘要和全文链接 摘要及PDF下载地址
论文链接
CSCD来源期刊 返回搜狐,查看更多 |




【本文地址】
今日新闻 |
推荐新闻 |