ROS中Rviz工具的使用 |
您所在的位置:网站首页 › 查看摄像头是否支持h265 › ROS中Rviz工具的使用 |
ROS中Rviz工具的使用
|
文章目录
准备工作使用RvizRviz的介绍Rviz的基本使用
使用Rviz显示摄像头视频显示参考资料
环境说明:
Ubuntu:18.04 ROS版本:melodic 准备工作1.打开摄像头设备 找到虚拟机设置,将USB设置为3.1 cheese#使用该命令会调用摄像头,同时会弹出一个界面显示摄像头的画面 #默认cheese应该是没有按照的,需要执行下面命令 sudo apt-get install cheese
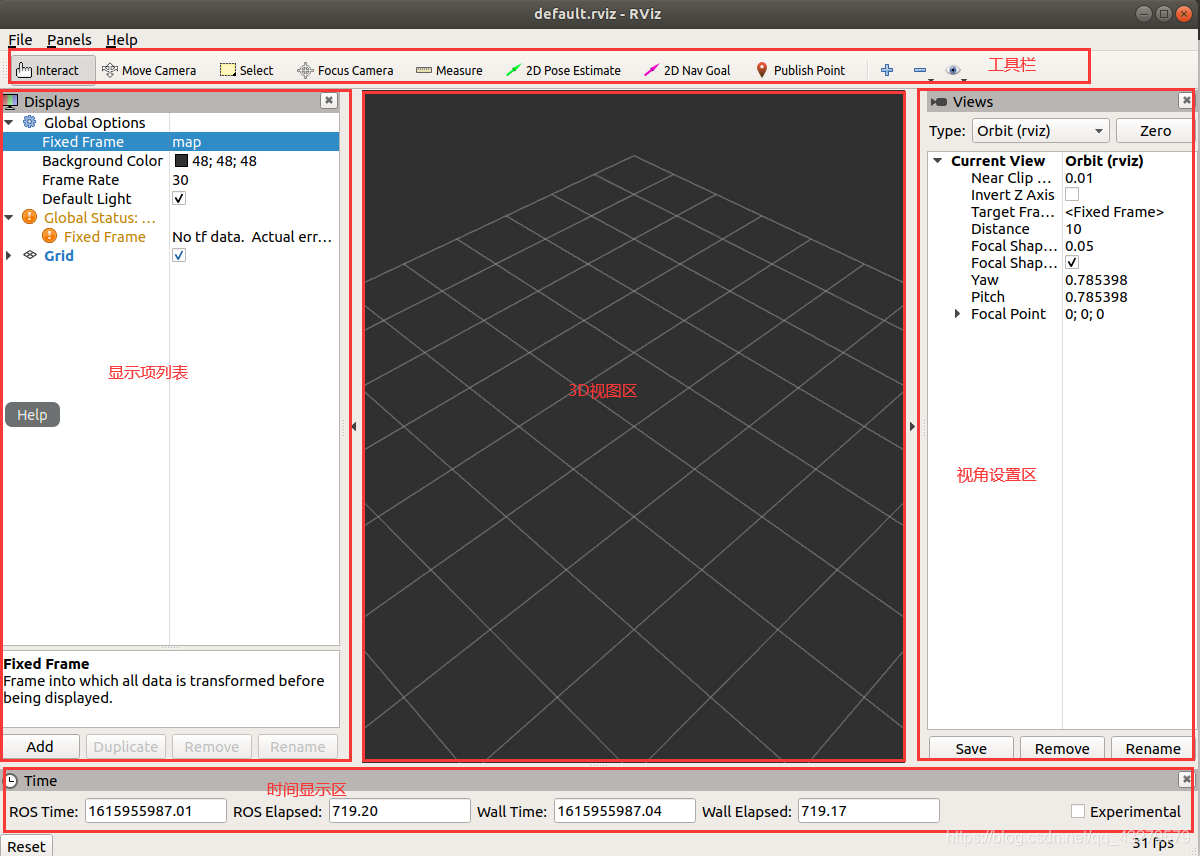
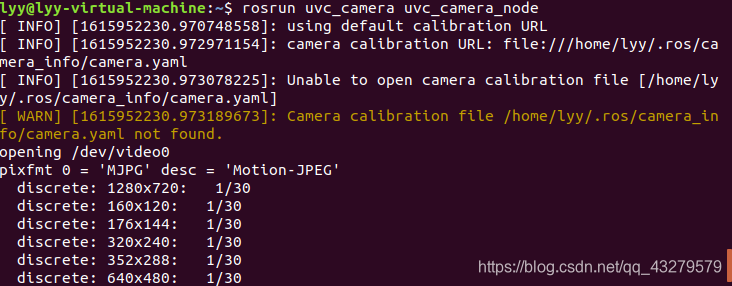
rviz是ros的一个可视化工具,用于可视化传感器的数据和状态信息。 Rviz的基本使用1.Rviz的启动方法 #开启两个终端分别执行下面命令 roscore rviz2.Rviz的界面说明 1.安装相关功能包 安装uvc camera功能包 sudo apt-get install ros-melodic-uvc-camera安装image相关功能包 sudo apt-get install ros-melodic-image-* sudo apt-get install ros-melodic-rqt-image-view2.启动Ros的核心程序 roscore3.在另外的终端运行uvc_camera节点 rosrun uvc_camera uvc_camera_node
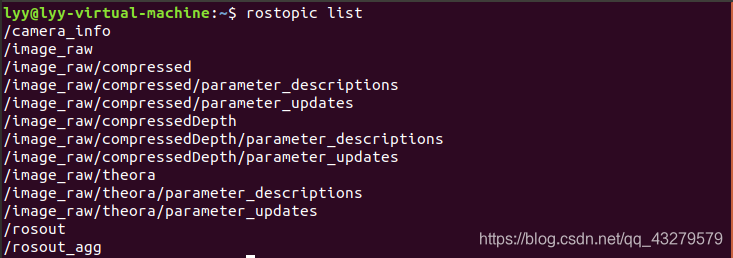
4.打开另外一个终端,查看话题消息 rostopic list
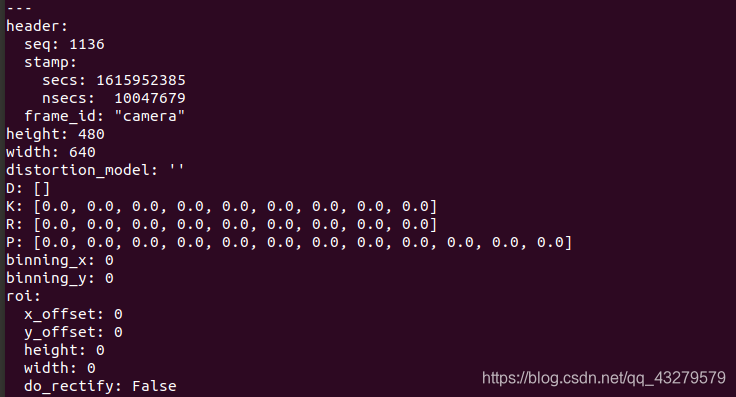
5.打印相机信息 rostopic echo /camera_info
6.打开rviz rviz
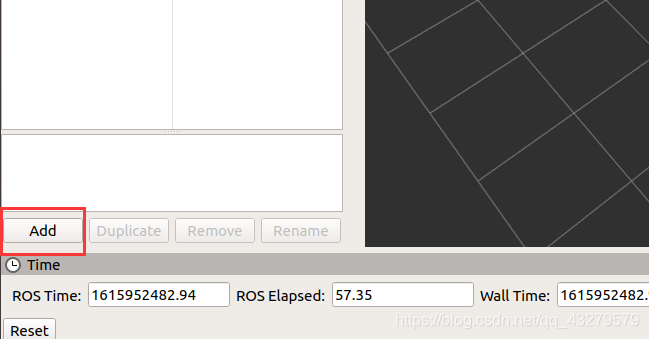
7.配置Rviz ①找到选项卡左下角的Add并点击 1.ROS学习记录:在ROS的Rviz下完成摄像头的视频显示 2.LINUX学习之ROS的UVC CAMERA(笔记本的摄像头) |
 连接摄像头
连接摄像头  连接成功,右下角出现该图标
连接成功,右下角出现该图标  2.查看摄像头是否可以正常使用
2.查看摄像头是否可以正常使用
 ②找到By display type下的Image,点击选择,然后点击OK添加
②找到By display type下的Image,点击选择,然后点击OK添加 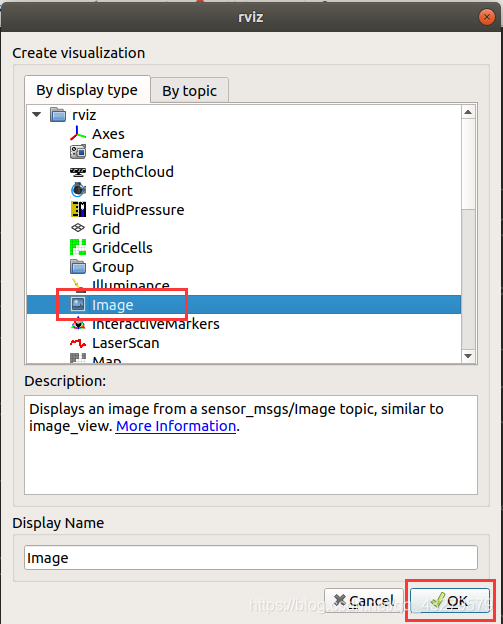 ③将image Topic的值更改为/image_raw
③将image Topic的值更改为/image_raw 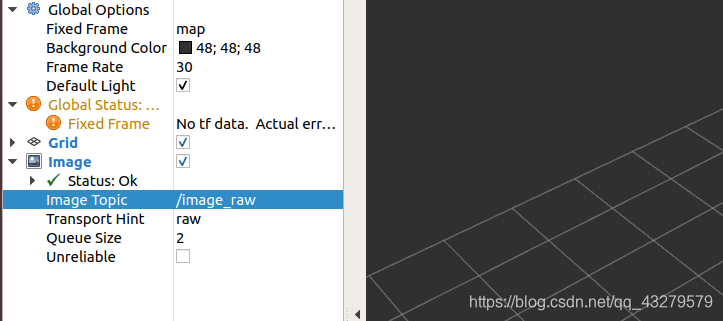 最终显示视频效果
最终显示视频效果  虚拟机使用摄像头的时候,如果连接摄像头后,使用cheese的时候可以打开摄像头,但是摄像头显示为黑屏的话,就需要更改USB。原来USB为2.0就修改为USB3.0,反之。
虚拟机使用摄像头的时候,如果连接摄像头后,使用cheese的时候可以打开摄像头,但是摄像头显示为黑屏的话,就需要更改USB。原来USB为2.0就修改为USB3.0,反之。【本文地址】
今日新闻 |
推荐新闻 |