机械设计基础笔记 |
您所在的位置:网站首页 › 机械设计基础表11-20页 › 机械设计基础笔记 |
机械设计基础笔记
|
1-1绪论 机器的共有特征:1.人为的多件实物组合体;2.各物体之间具有确定的相对运动;3.代替或减轻人类劳动,实现有益的机械功或转换机械能。 机器的组成:原动部分(动力来源)、工作部分(执行部分)、传动部分、控制部分 机构:1.人为的实物组合体;2.各部分有确定的相对运动;3.仅用来传递或转换运动;只具有极机器的前两个特征而不具备机器的第三个特征的装置称为“机构” 机构---具有确定相对运动的多件实物的组合体,仅用来传递或转换运动。如:连杆机构、凸轮机构、齿轮机构。 机械是机器和机构的总称。 机器与机构的关系:机器是能够完成机械功或转化机械能的机构或机构的组合,任意复杂的机器都是由若干组机构按一定规律组合而成的。 零件是机械最基本的组成单元。零件是制造的单元。机器和机构都是由零件组成的。 构件:构件是运动的单元,是由零件组成的刚性组合体。各零件之间无相对运动,形成一个运动的整体。分为活动构件和固定构件(机架)。 机构是具有确定相对运动的构件组合体。 机器是一种人为的构件组合体,其各构件之间具有完全确定的相对运动,而且可以用来代替人类的劳动以完成有益的机械功或转换机械能。 2-1平面机构的自由度和速度分析 平面机构:组成机构的所有构件都在同一平面或在几个平行平面内运动。 空间机构:非平面机构。 构件---独立的运动单元 零件---独立的制造单元 运动副:两个构件之间直接接触并保持一定相对运动的联接。1.两个构件 2.直接接触 3.有相对运动 运动副元素:直接接触的部分(点线面) 运动副的分类: 1.按引入的约束数:Ⅰ级副 Ⅱ级副 Ⅲ级副 Ⅳ级副 Ⅴ级副(螺旋:直线和旋转是关联的) 2.按相对运动范围分有:平面运动副---平面运动;空间运动副---空间运动 平面机构---全部由平面运动副组成的机构;空间机构---至少含有一个空间运动副的机构 3.按照运动副元素分类:高副---点、线接触,应力高(滚动副、凸轮副、齿轮副);低副---面接触,应力低(转动副、移动副) 回转副又称为铰链
运动链---两个以上的构件通过运动副连接而构成的系统。闭式链,开式链(机械手) 机构---具有确定相对运动的运动链称为机构。 固定件(机架)---作为参考系的构件;主动件---按给定运动规律运动的构件;从动件---其他可动构件。 机构=机架(一个)+原动件(一个或几个)+从动件(若干,由原动件运动规律和机构的组成决定) 2-2平面机构的自由度和速度分析2 机构运动简图---用以说明机构中各构件之间相对运动关系和尺度关系的简单图形 机构示意图---不按比例绘制的简图 机构运动简图应满足的条件:1.构件数目与实际相同;2.运动副的性质、数目与实际相符;3.运动副之间的相对位置以及构件尺寸与实际机构相符。 绘制机构运动简图:思路:先定原动件和工作部分,弄清运动传递路线,确定构件数目及运动副的类型,并用符号表示出来。 先两头,后中间 ;从头至尾走一遍;数数构件是多少;再看他们怎相连 步骤:1.分清运动和运动副、运动副的数量和布置特点; 2.分清构件数量、种类,原动件用箭头示意,固定件用阴影线示意; 3.选择视图和相对运动平面,不重叠、不共线、不交叉 4.选择比例尺,μ=实际尺寸(m)/图上尺寸(mm) 5.定机架位置,由原动件开始,按运动传递规律顺序比例绘制运动简图 2-3 平面机构的自由度和速度分析3 自由度:保证机构具有确定运动时所必需给定的独立运动参数称为机构的自由度。一个原动件只能提供一个独立运动参数。 机构具有确定运动的条件为:1.机构自由度大于零;2.自由度=原动件数 自由度计算:F=3n-2Pl-Ph(n个活动构件(机架不算),Pl个低副,Ph个高副) 低副引入两个约束,高副引入一个约束 计算平面机构自由度时应注意的问题 1.复合铰链:两个以上构件在同一处以转动副相连接。K个构件组成复合铰链时,此处转动副数为K-1个。 2.局部自由度:构件局部运动所产生的的自由度(应去掉) 3.虚约束:对机构的运动实际不起作用的约束(对构件所起的限制作用是重复的),计算时应去掉虚约束 出现虚约束的场合 1.两构件联接前后,联接点的轨迹重合。如平行四边形机构。火车轮、椭圆仪等。 2.两构件构成多个移动副,且导路平行。 3.两构件构成多个转动副,且同轴。 4.运动时,两构件上两点距离始终不变。 5.对运动不起作用的对称部分。如多个行星轮。 6.两构件构成高副,两处接触,且法线重合。如等宽凸轮。 虚约束的作用: 1.改善构件的受力情况,如多个行星轮; 2.增加机构的刚度,如轴与轴承、机床导轨; 3.使机构运动顺利,避免运动不确定,如车轮。 2-4平面机构自由度和速度分析4 速度瞬心 3-1平面连杆机构(1) 平面连杆机构是指采用低副连接而成的作平面运动的机构。能够实现一些复杂的运动规律。 优点:1.低副面接触,单位压力小,易润滑,磨损小;2.接触面均为平面或圆柱面,易加工,制造精度高;3.由几何形状实现接触,不需要附加压紧机构;4.改变杆的相对长度,从动件运动规律不同;5.连杆曲线丰富,可满足不同要求。 缺点:1.构件和运动副多、结构复杂、效率低、可能自锁;2.间隙传动,会引起一定的运动误差;3.存在惯性力,易引起机构振动,不适合高速;4.设计复杂,难以实现精确的轨迹。 连架杆---与机架相联的构件; 连杆---不与机架直接连接的杆件; 曲柄---作整周定轴回转的连架杆; 摇杆---作定轴摆动的连架杆; 周转副(整转副)---作360°相对回转的运动副; 摆转副(摆动副)---只能作有限角度摆动的运动副。 三种基本形式: 1.曲柄摇杆机构:曲柄+摇杆;将曲柄的整周回转转变为摇杆的往复摆动。 如雷达天线。 2.双曲柄机构:两个曲柄;将等速回转转变为等速或变速回转;如叶片泵、惯性筛等。
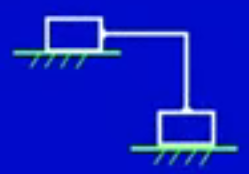
特例:平行四边形机构。平行四边形机构在共线位置出现运动不确定。 解决:采用两组机构错开排列
3.双摇杆机构:两个摇杆
3-2平面连杆机构(2) 曲柄摇杆机构 极限位置:曲柄与连杆两次共线时,摇杆所具有的位置。机构所处的这两个位置称为极位。重叠共线、拉直共线 摆角:摇杆在两极限位置间的夹角。 极位夹角:连杆与曲柄两次共线时所夹的锐角。 1.急回运动:牛头刨床,缩短非生产时间,提高生产率 行程速比系数K
θ为摇杆处于两极限位置时,对应的曲柄所夹的锐角,称为极位夹角。
2.压力角α:从动件上受力点受力F的方向与该点绝对速度之间所夹的锐角。
主动件与机架共线两处之一 3.死点位置:摇杆为主动件,且连杆与曲柄两次共线时,
铰链四杆机构有整转副的条件 平面四杆机构具有整转副---可能存在曲柄。曲柄作整周回转,必有两次与机架共线 曲柄存在的条件: 1.最长杆与最短杆的长度之和应≤其他两杆长度之和,称为杆长条件; 2.连架杆或机架之一为最短杆。
1.取最短杆相邻的杆件为机架时,最短杆为曲柄,另一连架杆为摇杆,得到曲柄摇杆机构 2.取最短杆为机架时,得到双曲柄机构; 3.取最短杆的对边为机架时,两连架杆都不能做整周转动,得到双摇杆机构。 3-3平面连杆机构(3) 铰链四杆机构的演化 1.改变构件的形状和运动尺寸;
2.改变运动副的尺寸
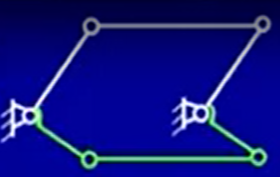
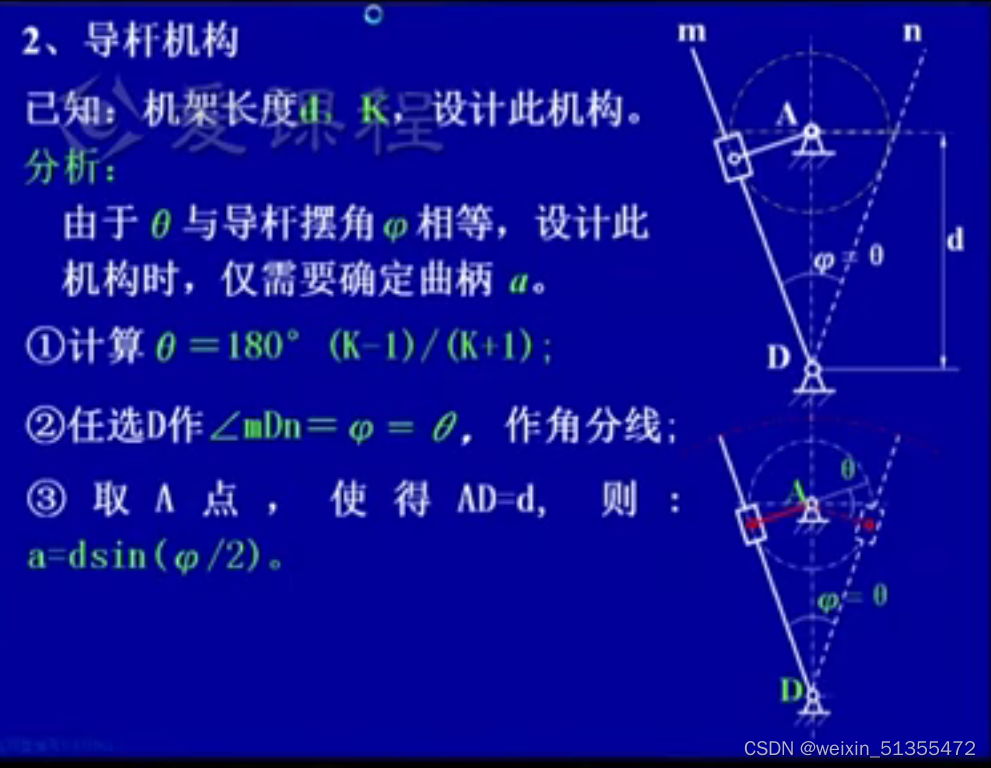
3.选不同的构件为机架 如图二选用最短杆为机架得到双曲柄机构,双曲柄机构演化成转动导杆机构。
平面四杆机构的设计
三类设计要求: 1.满足预定的运动规律,两连架杆转角对应,如:飞机起落架、函数机构 2.满足预定的连杆位置要求,如铸造翻箱机构 3.满足预定的轨迹要求,如:鹤式起重机、搅拌机等。 给定的设计调价: 1.几何条件(给定连架杆或连杆的位置) 2.运动条件(给定K)(有急回运动) 3.动力条件(给定 设计方法:图解法(最常用)、解析法(计算机运用、精确)、实验法(试凑) 3-4平面连杆机构(4)
2.按预定连杆位置设计四杆机构
3.给定两连架杆对应位置设计四杆机构 解析法 4.按预定的运动轨迹设计四杆机构 本章重点 1.四杆机构的基本形式、演化及应用; 2.曲柄存在条件,压力角α、传动角γ、死点、极位夹角和行程速比系数等的物理含义,并熟练掌握其确定方法; 3.掌握按连杆二组位置、三组位置、连架杆三组对应位置、行程速比系数设计四杆机构的原理与方法。 4-1凸轮机构
从动件的常用运动规律
运动规律:推杆在推程或回程时,其位移s、速度v和加速度a随时间t的变化规律。 1.等速运动规律(有刚性冲击,只适用于低速轻载的凸轮机构)
2.等加速等减速运动规律(柔性冲击,适用于中低速的凸轮机构) 3.五次多项式运动规律(无冲击,适用于高速凸轮) 4.余弦加速度(简谐)运动规律(适用于中载轻载中速) 5.正弦加速度(摆线)运动规律(无冲击) 6.改进型运动规律:将几种运动规律组合,以改善运动特性 凸轮机构的压力角
凸轮机构(3) 凸轮设计一般已知基圆半径和从动件运动规律 凸轮的轮廓线等于基圆半径+从动件的位移
5-1齿轮机构 作用:传递空间任意两轴(平行、相交、交错)的旋转运动,或将转动转换为移动。 优点:传动比准确、传动平稳;圆周速度大,高达300m/s;传动功率范围大,从几瓦到10万千瓦;效率高、使用寿命长、工作安全可靠;可实现平行轴、相交轴和交错轴之间的传动; 缺点:要求较高的制造和安装精度,加工成本高、不适宜远距离传动(如单车)
|











































【本文地址】
今日新闻 |
推荐新闻 |