苹果采摘机械手设计(水果采摘机)【毕业论文(说明书)+SOLIDWORKS三维图+step及x |
您所在的位置:网站首页 › 机械设计原理与方法论文怎么写 › 苹果采摘机械手设计(水果采摘机)【毕业论文(说明书)+SOLIDWORKS三维图+step及x |
苹果采摘机械手设计(水果采摘机)【毕业论文(说明书)+SOLIDWORKS三维图+step及x
|
摘 要
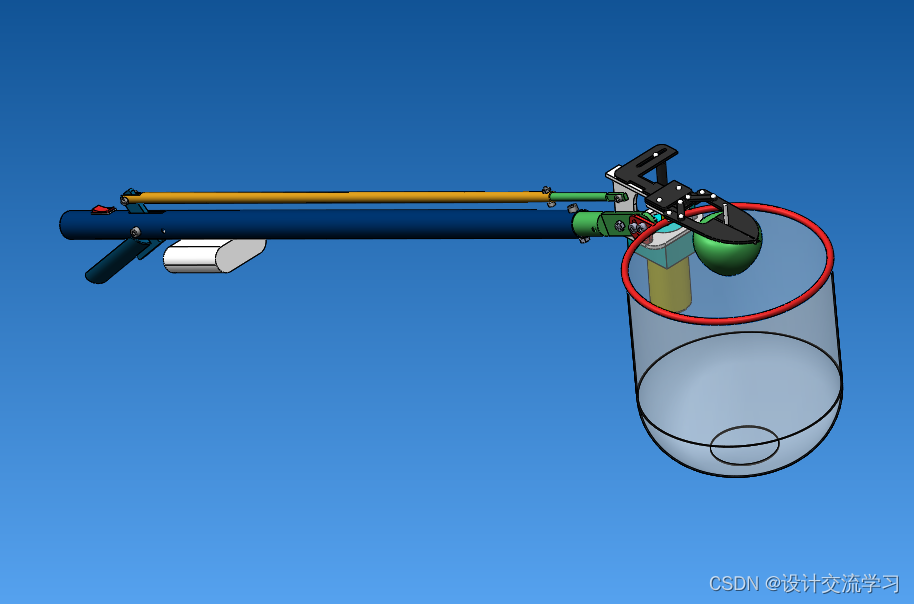
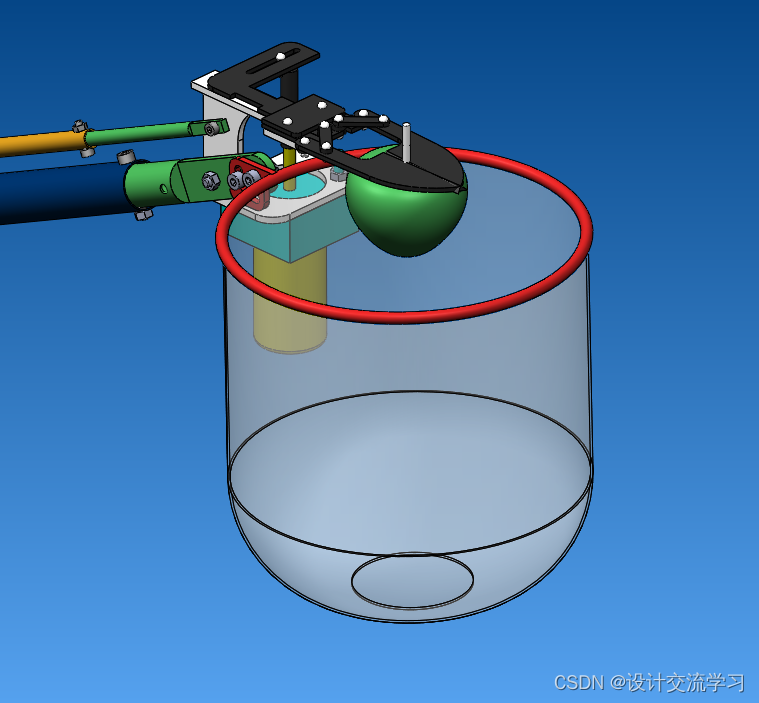
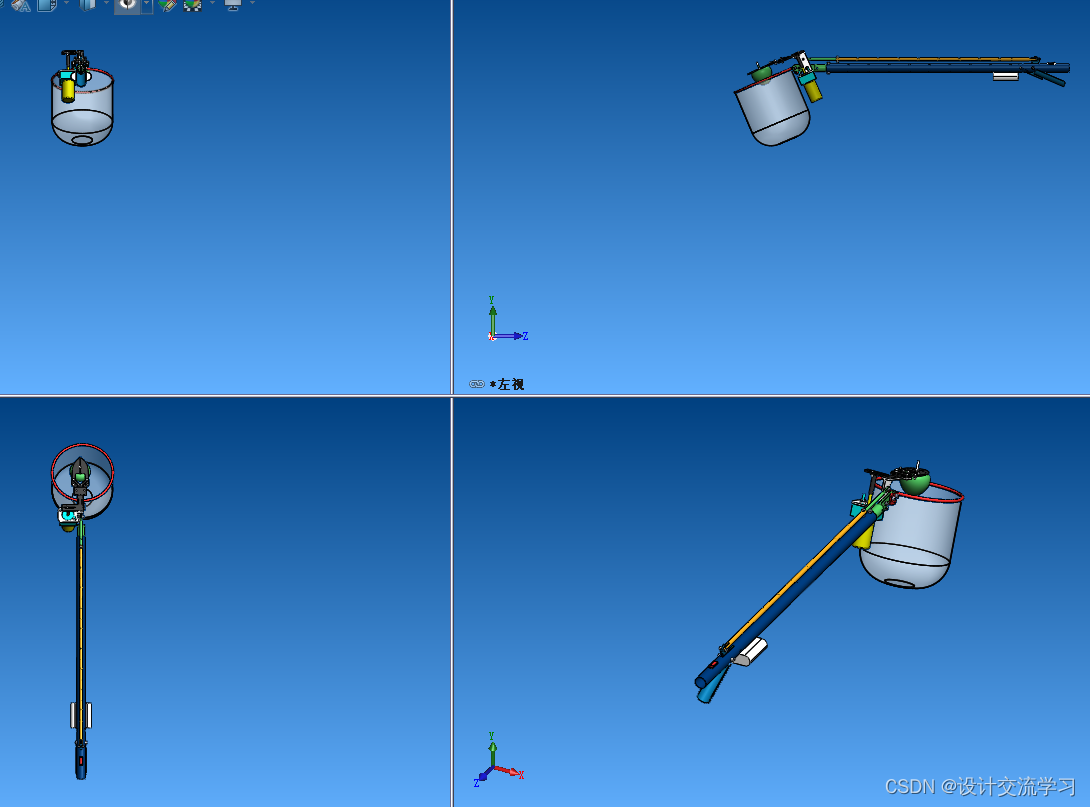
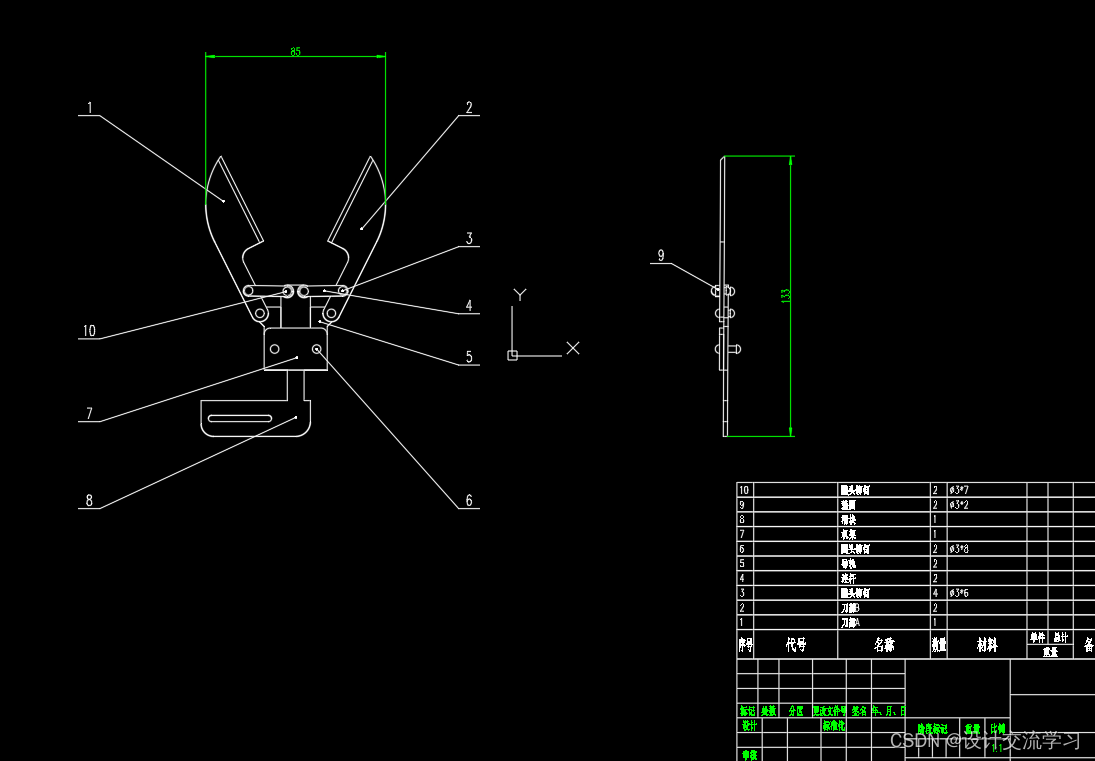
随着人力劳动成本的增加及农业自动化程度的提高,在未来的水果采摘作业中将更多的用自动化生产设备代替人力劳动。本设计旨在开发一种苹果采摘的辅助机械手。该机械手为手持式长杆结构,前端伺服电机通过行星减速器,带动曲柄摇杆机构往复运动,实现剪刀的张开与闭合,配合手柄所连接的连杆机构将剪刀像果柄处移动,进而剪断果柄,最终苹果果实落入收纳机构,一并实现对苹果的采摘和收纳。采用电机作为驱动力,通过曲柄摇杆机构实现剪刀的开合,并且顺利剪断果柄,将位于高出树枝上的果子剪下来,下方配用柔性收纳装置将果子暂时收纳到袋子中,收集满后放入箱内。采摘机械手的设计解决了人工攀爬高危树枝采摘水果的问题。采摘更安全,携带更方便。效率可达人工采摘的3-5倍。它大大提高了采摘效率,节省了劳动力,大大降低了收获成本,为果农创造了更大的收入。此外,该机械手还可用于多种水果的采收,在低成本、高利用率的前提下,为我国果林的发展做出了巨大贡献。 关键词:机械手;采摘;伺服电机;行星减速器;曲柄摇杆 ABSTRACTWith the increase of labor cost and the improvement of agricultural automation, more automatic production equipment will be used to replace human labor in fruit picking operation in the future. The purpose of this design is to develop an assistant manipulator for Apple picking. The manipulator is a hand-held long rod structure. The front-end servo motor drives the reciprocating movement of crank-rocker mechanism through planetary reducer to realize the opening and closing of scissors. The scissors move like the fruit handle with the connecting rod mechanism connected by the handle, and then cut the fruit handle. Finally, the apple fruit falls into the receiving mechanism, and the apple picking and accepting are realized. Using motor as driving force, the scissors can be opened and closed by crank and rocker mechanism, and the fruit handle can be cut off smoothly. The fruit located on the branch above can be cut off. The fruit can be temporarily stored in the bag with a flexible receiving device below, and then put into the box when it is full.The design of picking manipulator solves the problem of artificially climbing high-risk branches to pick fruit. Picking is safer and easier to carry. The efficiency can reach 3-5 times of manual picking. It greatly improves the efficiency of harvesting, saves labor, greatly reduces the cost of harvesting, and creates greater income for fruit farmers. In addition, the manipulator can also be used for harvesting a variety of fruits, and has made great contributions to the development of fruit forests in China on the premise of low cost and high utilization rate. Key words: Manipulator;Pick;servo motor;Planetary reducer;Crank rocker 目 录 摘 要 ABSTRACT 第1章 绪 论 1.1 引言 1.2 课题研究的目的及意义 1.3 国内外研究现状及发展趋势 1.3.1国外发展概况 1.3.2国内发展概况. 1.3.3果园采摘机械的发展趋势. 1.4 本文研究的目标、研究内容和研究方法 1.4.1研究目标 .1.4.2研究内容和研究方法 第2章 总体方案设计 2.1采摘机械手臂的分类 2.1.1机械式采摘 2.1.2 机器人采摘 2.2机械手臂机构的确定 2.3组成与工作原理 2.4剪切方案的选择 2.5总体控.制方案设计 第3章 剪切机构设计 3.1电动机及减速器选择 3. 1. 1 果实采摘过程受力分析 3. 1. 2 采摘结果分析 3.2电机选型计算 3.2.1最大剪切力 P max 3.3电动机功率的选择 3.4偏心曲柄滑块机构的计算 3.4.1 x 和最小传动角 γmin 3.5行星减速器的设计计算 3.5.1 分析要求 3.5.2 系统组成框图 3.5.3传动方案的分析与拟定 结 论 参考文献 致 谢
|


【本文地址】