移动机器人底盘控制器,六年工作经验总结 |
您所在的位置:网站首页 › 机器人驱动电机的作用 › 移动机器人底盘控制器,六年工作经验总结 |
移动机器人底盘控制器,六年工作经验总结
|
移动机器人底盘主要包含电机,电机驱动器,底盘控制器和其它设备。底盘控制器与电脑通信,把电脑指令解析后发送给电机驱动器,同时控制器底盘其它设备,比如碰撞传感器,避障传感器,充放电管理,或者声光设备等。也有底盘不用底盘控制器,电脑直接控制电机驱动器,构成最简单的机器人底盘。 一、差动底盘 差动底盘主要由两个直流电机、前后两个万向轮构成。万向轮采用减震设计,保证四个轮子同时接地,避免出现打滑现象。
V=(Vr+Vl)/2 左右轮的速度除以2是底盘的速度V W=(Vr-Vl)/L 左右轮速度差除以轮子间距是偏航角W 推导:Vr=V+L*W/2 Vl=V-L*W/2 速度V(mm/s)与转速的方程:n=V*60/(Pi*R) R是轮子直径 #define Pi 3.1415926f #define GearRatio xx //齿轮减速比 #define Wheel_R xx //轮胎外直径 #define WheelSpa xx //轮子间距 n1=(speed+WheelSpa*omega/2)*60*GearRatio/(Pi*Wheel_R); //右轮 n2=(speed-WheelSpa*omega/2)*60*GearRatio/(Pi*Wheel_R); //左轮n1和n2分别是左右轮转速(单位RPM)。 电脑通过RS485发送指令给底盘控制器,speed(单位mm)和omega(单位rad/s*1000),底盘控制器解析后发送给电机驱动器。 二、四驱底盘 四驱底盘最大的问题是没有转向轮,转弯的时完全靠四个轮子的摩擦力实现,特别是原地转圈,比较考验电机功率和轮胎质量。
方案有两种,一种是四个轮子四个电机,优点是结构简单,缺点是四个轮子不能完全同步,会有启停误差,导致轮子堵转。
另一种是两个电机,前后两个轮子通过同步带连接,前后轮之间没有了启停误差,电机功率选择稍大一点,跑柏油路毫无压力。
无论采用哪种方案,最终还是用差动模式来建模,控制方法参考差动模式。 三、履带底盘 履带底盘主要是结构复杂,控制方法与差动完全相同
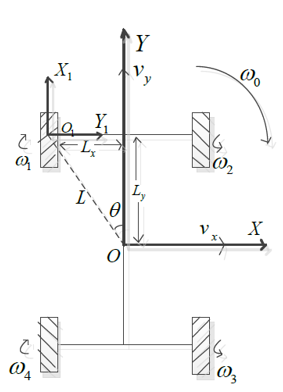
四、全向麦克纳姆轮底盘
麦克纳姆轮的运动学方程比较复杂,网上资料也比较多,不再多说。 麦轮底盘包含三个参数,速度spped、偏航角omega和自旋角度theta,与差动底盘相比多了自旋角度theta。 #define Pi 3.1415926f #define GearRatio xx //齿轮减速比 #define Wheel_R xx //轮子直径 #define Wheel_Lx xx //轮子左右间距一半 #define Wheel_Ly xx //轮子前后间距一半 n1=60*GearRatio*( speed*cos(theta)+speed*sin(theta)+(Lx+Ly)*omega)/(2*Pi*Wheel_R); n2=60*GearRatio*( speed*cos(theta)-speed*sin(theta)+(Lx+Ly)*omega)/(2*Pi*Wheel_R); n3=60*GearRatio*(-speed*cos(theta)-speed*sin(theta)+(Lx+Ly)*omega)/(2*Pi*Wheel_R); n4=60*GearRatio*(-speed*cos(theta)+speed*sin(theta)+(Lx+Ly)*omega)/(2*Pi*Wheel_R);n1、n2、n3、n4分别是四个轮子轮转速(单位RPM)。
电脑通过RS485发送指令给底盘控制器,speed(单位mm)和omega(单位rad/s*1000)和theta(单位 °),底盘控制器解析后发送给四个电机驱动器。 五、其它底盘 其它底盘见过的有阿克曼、六轮,只见过没做过就不说了。
|















【本文地址】
今日新闻 |
推荐新闻 |