MATLAB实践:机器人运动学、动力学建模与轨迹规划算法的研究 |
您所在的位置:网站首页 › 机器人运动算法 › MATLAB实践:机器人运动学、动力学建模与轨迹规划算法的研究 |
MATLAB实践:机器人运动学、动力学建模与轨迹规划算法的研究
|
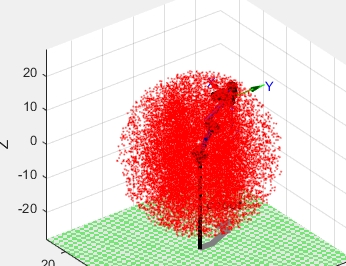
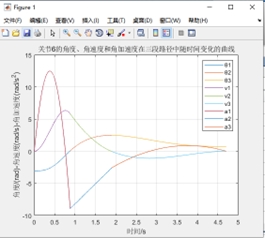
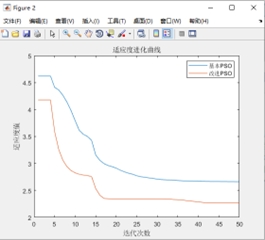
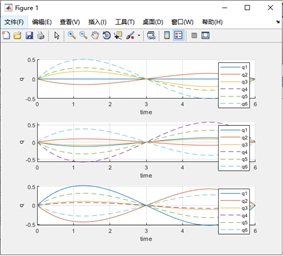
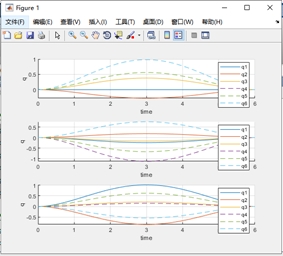
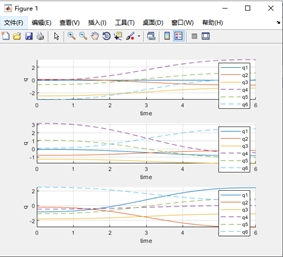
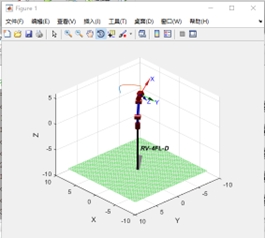
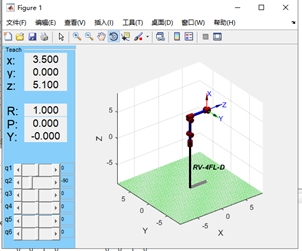
MATLAB机器人运动学正逆解、动力学建模仿真与轨迹规划,雅克比矩阵求解.蒙特卡洛采样画出末端执行器工作空间 基于时间最优的改进粒子群优化算法机械臂轨迹规划设计 ID:57100675135365038 今天是昨天的明天 MATLAB机器人运动学正逆解、动力学建模仿真与轨迹规划是机器人领域中的重要研究方向之一。本文将围绕这一主题展开,探讨雅克比矩阵求解和蒙特卡洛采样在机器人末端执行器工作空间的应用,以及基于时间最优的改进粒子群优化算法在机械臂轨迹规划设计中的应用。 首先,介绍MATLAB在机器人运动学正逆解方面的应用。机器人的运动学正解是通过给定机器人的关节角度,计算末端执行器在运动过程中的位置和姿态。而运动学逆解则是根据给定的末端执行器位置和姿态,计算机器人关节角度的过程。通过MATLAB提供的工具箱和函数,可以快速准确地求解机器人的运动学正逆解,实现机器人的精确控制和运动规划。 其次,动力学建模仿真也是研究机器人运动控制中的重要环节。通过建立机器人的动力学模型,可以模拟机器人在不同工况下的运动行为。MATLAB提供了丰富的工具和函数,可以方便地进行机器人动力学建模,并通过仿真来验证模型的准确性和稳定性。 对于机器人的轨迹规划,雅克比矩阵的求解是一个关键问题。雅克比矩阵描述了机器人末端执行器在关节空间和笛卡尔空间之间的关系。通过求解雅克比矩阵,可以根据末端执行器的期望轨迹来控制机器人关节的运动,实现轨迹的精确规划和执行。 在机器人末端执行器工作空间的研究中,蒙特卡洛采样是一种常用的方法。通过随机采样机器人关节的角度,可以绘制出末端执行器的工作空间。MATLAB提供了强大的绘图功能,可以基于蒙特卡洛采样数据绘制出机器人末端执行器的工作空间图像,帮助工程师和研究人员更直观地了解机器人的运动范围和限制。 最后,基于时间最优的改进粒子群优化算法在机械臂轨迹规划设计中的应用。粒子群算法是一种模拟自然界中鸟群觅食行为的优化算法,可以用于解决多维优化问题。在机械臂轨迹规划中,通过改进粒子群算法,结合时间最优准则,可以实现机械臂在规定时间内完成既定任务的轨迹规划设计。MATLAB提供了优化工具箱和函数,便于工程师和研究人员使用改进粒子群算法进行机械臂轨迹规划设计,并得到较好的效果。 综上所述,MATLAB在机器人运动学正逆解、动力学建模仿真与轨迹规划方面具有丰富的应用和强大的功能。通过雅克比矩阵求解和蒙特卡洛采样,可以准确地描述机器人的运动特性和工作空间。而基于时间最优的改进粒子群优化算法能够实现机械臂轨迹规划的高效设计。这些方法和算法的应用,为机器人领域的研究和工程实践提供了有力的支持。 以上相关代码,程序地址:http://matup.cn/675135365038.html |
【本文地址】
今日新闻 |
推荐新闻 |