基于51单片机的舞蹈机器人四路步进电机控制仿真 |
您所在的位置:网站首页 › 机器人跳舞代码程序 › 基于51单片机的舞蹈机器人四路步进电机控制仿真 |
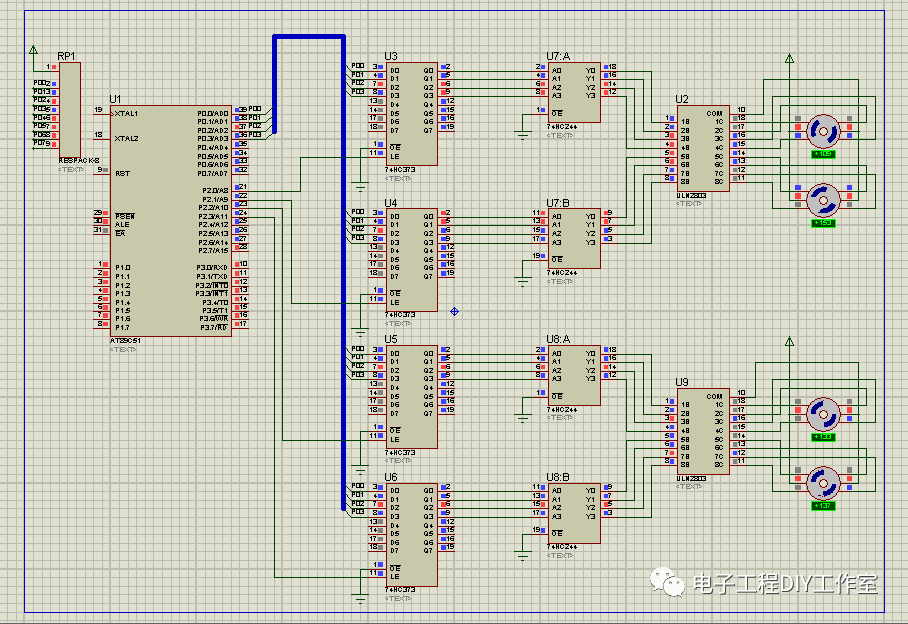
基于51单片机的舞蹈机器人四路步进电机控制仿真
|
资料编号:091 下面是相关功能视频演示: 91-基于51单片机的舞蹈机器人四路步进电机控制仿真(源码+仿真+全套资料) 功能介绍:通过51单片机控制4个步进电机旋转,模拟出机器人的四肢动作,全套资料齐全:程序采用C语言,并且有中文注释,新手容易看懂,仿真采用Proteus,编程工具采用keil5
下面是部分程序展示: void InitTimer(void) //初始化计数器 { TH0 = 0xFA; //设置触发周期:1000次 TL0 = 0x24; TMOD = TMOD |0x01; //select mode 1 TR0 = 1; //start timer0 ET0 = 1; //enable timer 0 interrupt EA =1; //global interrupt enable } void SetAllSpeeds(void) //设置各电机的速度,并让它运动起来 { char delta; //旋转方向 1:正 -1:反 0:停 for(i=0;i speed_tickers[i] = 0; delta = 1; } else if(speed_tickers[i] unsigned char j; SetAllSpeeds(); InitTimer(); time_t++; if(time_t==200) //每200次触发读取一次新舞步数据 { for(j=0;j |
【本文地址】