2022年电子设计竞赛C题设计报告(小车题)+测评现场 |
您所在的位置:网站首页 › 智能循迹小车设计报告 › 2022年电子设计竞赛C题设计报告(小车题)+测评现场 |
2022年电子设计竞赛C题设计报告(小车题)+测评现场
|
2022年全国大学生电子设计竞赛 小车跟随行驶系统(C题) 【本科组】
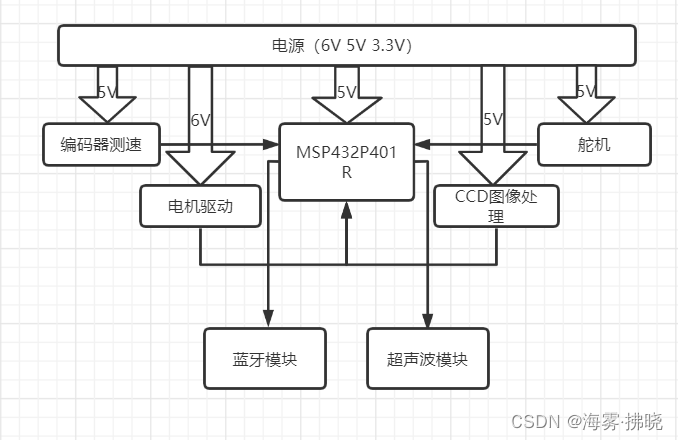
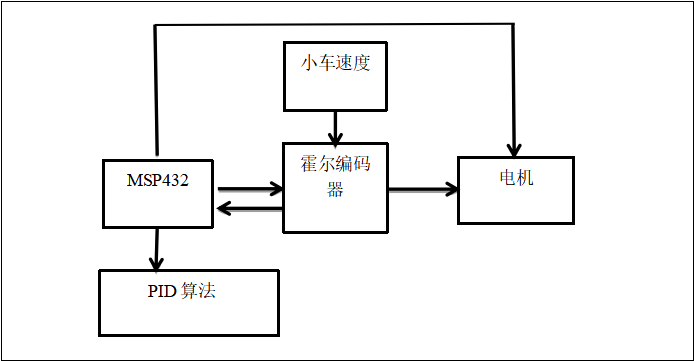
目录 小车跟随行驶系统(C题) 摘 要 Abstract 1系统方案 1.1 控制系统的论证与选择 1.2 舵机控制模块论证与选择 1.3 超声波测距模块的论证与选择 1.4 蓝牙通信模块方案的论证与选择 2系统理论分析与计算 2.1控制方案的设计与分析 2.2 参数的计算 3电路与程序设计 3.1电路的设计 3.2程序的设计 1、程序功能描述 2、 程序设计思路 3.2.2程序流程图 4测试方案与测试结果 4.1测试方案 4.2 测试结果及改进 5参考文献 附录1:电路原理图 摘 要 本设计以MSP432P401R为主控芯片,协调各个模块共同工作驱动双车以实现题设中的小车跟随系统。通过四路PWM驱动电机使小车完成启动和制动,驱动舵机转动来实现小车转向,行驶过程中循迹和内外圈识别以及特定停车标记点识别通过CCD摄像头完成,双车间距离通过超声波模块测量实时数据回传到MCU上进行PID算法调整,领头小车和跟随小车间的通信通过蓝牙模块进行通信和协同完成本次赛题的相关任务,跟随小车的行驶完全由领头小车指挥控制,一键启动并完成每项任务的行驶过程。 关键词:MSP432P401R 小车跟随系统 超声波测距 PID算法 蓝牙模块 Abstract This design uses MSP432P401R as the main control chip to coordinate each module to work together to drive the double car to realize the car following system in the design. The four-channel PWM motor is used to drive the car to start and brake, and the steering engine is driven to rotate to realize the car steering. The tracking, inner and outer ring identification and specific parking mark identification in the driving process are completed through the CCD camera. The distance between the two workshops is measured by the ultrasonic module and the real-time data is sent back to the MCU for PID algorithm adjustment. The communication between the lead car and the following workshop is carried out through the Bluetooth module and the relevant tasks of this competition are completed in cooperation. The driving of the following car is completely controlled by the lead car, and the driving process of each task is started and completed with one click. Key words: MSP432P401R , car following system , ultrasonic ranging PID algorithm ,Bluetooth modul 1系统方案本系统主要由总控制模块、舵机控制模块、超声波测距模块、蓝牙通信模块组成,其系统框图如图所示。 图1小车跟随系统设计框图 1.1 控制系统的论证与选择方案一:MSP430系列单片机是一种16位超低功耗、具有精简指令集(RISC)的混合信号处理器,该系列单片机多应用于需要电池供电的便携式仪器仪表中。 方案二:MSP432E4 具有以太网和有线连接,适合做物联网系统和通信方面使用。 方案三:MSP432P4 具有高性能 ADC 和低功 耗,MSP432系列使用Cortex -M4F内核具有超低功耗、应用设计方便、扩展性好等特点,兼具MSP430的性能和MSP432的部分通信方面功能的同时很适合用来做智能小车的控制。 综上三种方案,按照本次赛题要求,控制系统芯片选用方案三芯片型号为MSP432P401R作为主控芯片来控制小车循迹及双车通信。 1.2 舵机控制模块论证与选择方案一:SG90舵机,它的优点是比较便宜,缺点是质量不太好,因为它使用的是塑料减速齿轮,因此它易受损,同时它的扭距也小 方案二:MG990舵机,它的扭距很大,近乎于SG90的十倍,因此它的体积也要大一些,不适合小车驱动的长度和宽度设计要求(15*25cm) 方案三:MG90舵机,它可以看作是SG90舵机的升级版,它使用的是金属齿轮并且它的质量和使用寿命都比SG90要好,但是价格也相对贵一点。 综合以上三种方案,选择方案三的金属齿轮类型舵机。 1.3 超声波测距模块的论证与选择方案一:采用HC-SR04超声波传感器测量小车间距。这种传感器在较近距离测距误差较小,但高速行驶过程中可能出现延迟。 方案二:采用逐飞科技的有来有去摄像头,适应于双车间距运动中的测量和调整,之前做过相关的程序可移植性较强。 综合以上两种方案,选择方案二。 1.4 蓝牙通信模块方案的论证与选择方案一:HC-02蓝牙模块,采用AT指令进行调整蓝牙的相关参数信息,连接不稳定,经常出现无法连接的情况,很多APP搜索不到蓝牙或者无法传输数据 方案二:HC-05蓝牙,采用CSR主流蓝牙芯片,蓝牙V2.0协议标准,可以和笔记本,手机等设备无缝连接,适合进行软件通信。 方案三:逐飞科技CH9141蓝牙透传模块,带流控位引脚,发射功率8档可调,设备一对一进行配对,主机模式下可以上电自动连接已绑定过的从机设备,连接后会自动跳频(FHSS),避免与其他设备相互干扰。 综上三种方案分析比较,逐飞科技蓝牙模块性能更强,更适合本次赛题的双车通信系统且之前做智能车比赛有使用过的经验,故此选择方案三 2系统理论分析与计算 2.1控制方案的设计与分析 2.1.1 小车运控总设计由于题目中要求小车可以在指定位置一键启动并按要求刹车减速制动,因此小车控制方案中需要去考虑电机正反转的问题,我们决定采用四路PWM驱动四个电机来实现电机的正转加速和反转减速的过程,两辆小车在行驶过程中会进行蓝牙通信以实现自动调整PWM输出的占空比达到调速使两个小车不会发生碰撞和完成题目中指定的三圈任务,小车通过CCD完成循迹,内外车道的判断和特征停车点的识别。 2.1.2 小车巡线控制设计题目要求小车沿着白底黑线行驶即巡线的要求,小车识别黑线通过CCD摇头循迹完成,CCD是一种电荷耦合元件,可以让循迹小车能够按照指定的轨迹行进,因此,必须保证CCD循迹小车上的CCD摄像头能够精准识别轨迹路线,进而准确传达控制命令.我们本次比赛所用的CCD循迹小车主要是将CCD摄像头固定在循迹小车的正前方来进行循迹。在小车沿着路径行进的过程中,当遇到弯道并且行驶速度过快时,很容易偏离路径甚至会冲出路径。当遇到这种情况时,我们本次比赛所用的小车由于采用了固定CCD摄像头的方式,CCD视野有限而无法找到原来的路径,因此通常采用的解决办法是通过程序去估测小车的偏离量并调节小车到原来的位置,所以需要程序去估测并不断尝试调节小车的位置,由于小车偏离路径不大,调整数据便可实现循迹。 2.1.3 小车特定标记位的停车及内外圈控制 特定标记位的停车和内外圈的控制都需要特征点的识别判断,通过摄像头的拍摄特定点识别进入条件语句进行特定功能进行——停车,内外圈更换,加速超车和反超等任务。 2.1.4 小车间通信模式分析 领头小车和跟随小车之间采用逐飞科技蓝牙模块进行通信,领头小车CCD识别内外圈和特殊停车点做出相应的换圈和停车制动并将信息通过蓝牙传递给跟随小车,跟随小车接收到信号后做出应答并保持与领头小车同样的动作或者特殊超车动作。超声波模块测距信息也通过蓝牙互传进行双车PID调速以达到要求。 2.2 参数的计算 2.2.1 小车速度的PID计算MSP432最小系统板通过霍尔编码器,利用检测脉冲的方式来计算转速及位置,输出有关旋转轴运动的信息进一步转换为速度、距离、每分钟转速等信息。 MCU对数据进行PID算法处理可以调节小车当前的速度。PID是比例、积分、微分的缩写。比例调节是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。积分调节是使系统消除稳态误差,提高无差度。因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强。反之Ti大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。几者结合从而保持小车运行的稳定。 2.2.2 双车距离控制的PID计算在双车的前后都装上超声波测距模块,采用之前使用过的逐飞科技的有来有去,该超声波测距传感器能测量出发出声波到接收到声波之间的时间长度,设这个值为X,则X/340/2即为所测量距离的长度,将这个经计算所得的值与所需要的距离进行对比,再对MSP432进行反馈从而实现调速定制,来达到控制两车距离固定范围满足题目要求的目的。 3电路与程序设计 3.1电路的设计 3.1.1系统总体框图设计控制系统框图
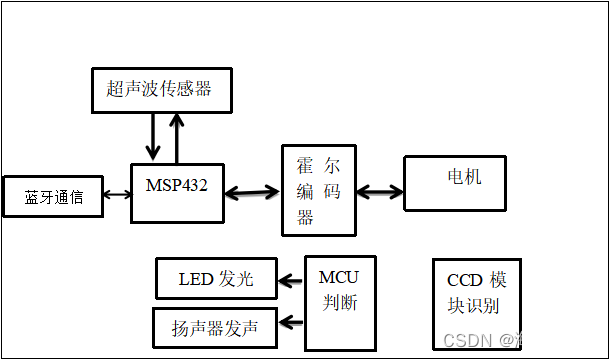
图2 控制系统框图 3.1.3 小车运控设计框图小车运控设计框图
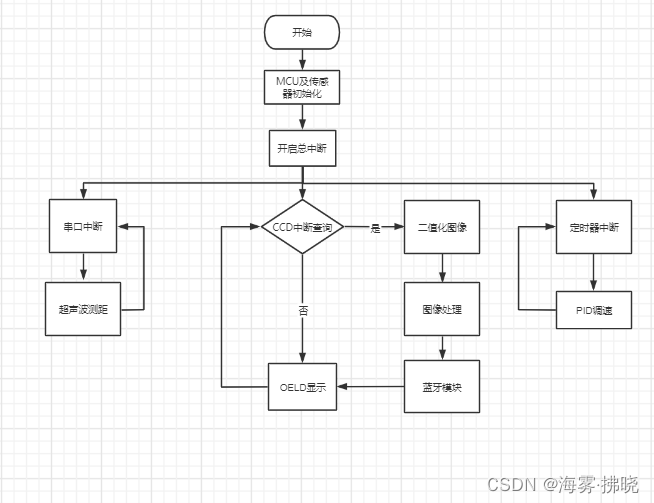
图3 小车运控设计框图 3.2程序的设计 3.2.1程序功能描述与设计思路1、程序功能描述 模式一:一键启动领头小车和跟随小车,完成一圈行驶后领头小车到达 A 点处停车,跟随小车应及时停止; 模式二:将领小车放在路径轨迹的起始位置 ,跟随小车放在路径上 E 点所在边的直线区域,随机指定的位置,设定领头小车速度为 0.5m/s,沿着外圈 路径行驶两圈停止且跟随小车能快速追上领头小车,然后按 20cm 间距跟随领头小车行驶,全程不能发生小车碰撞。 模式三:第一圈领头小车和跟随小车都沿着 外圈路径行驶。第二圈领头小车沿着外圈路径行驶,跟随小车沿着内圈路径行驶, 实现超车领跑。第三圈跟随小车沿着外圈路径行驶,领头小车沿着内圈路径行驶, 实现反超和再次领跑。 程序设计思路先设计出每种功能中相同的程序部分方便在各个步骤中调用,再设计出各个步骤中特有的部分加上之前的公共部分进而完成整个步骤。 3.2.2程序流程图
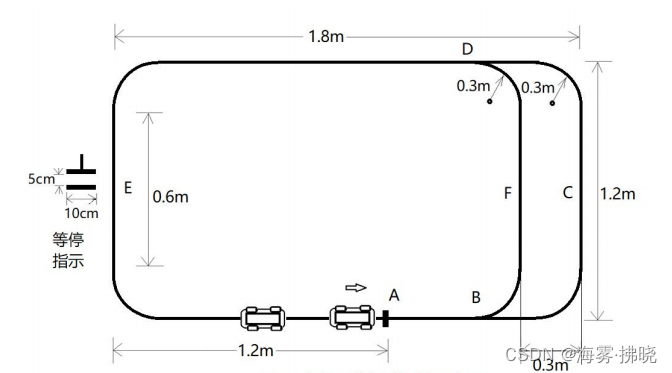
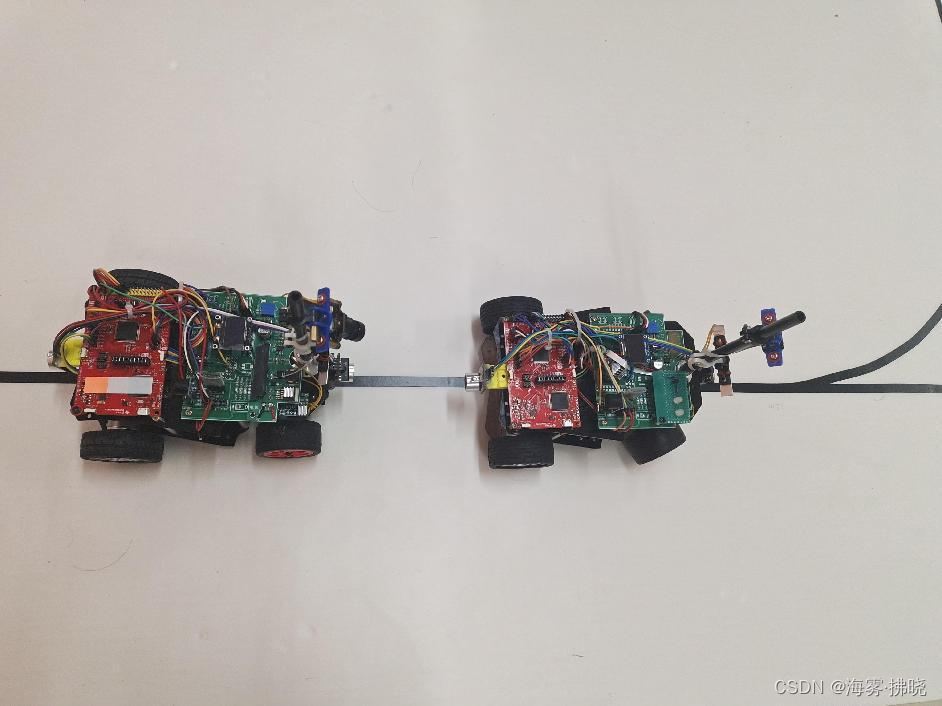
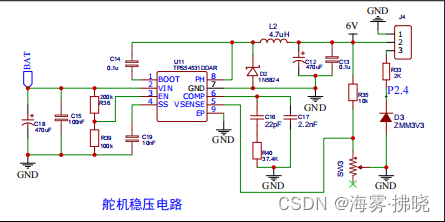
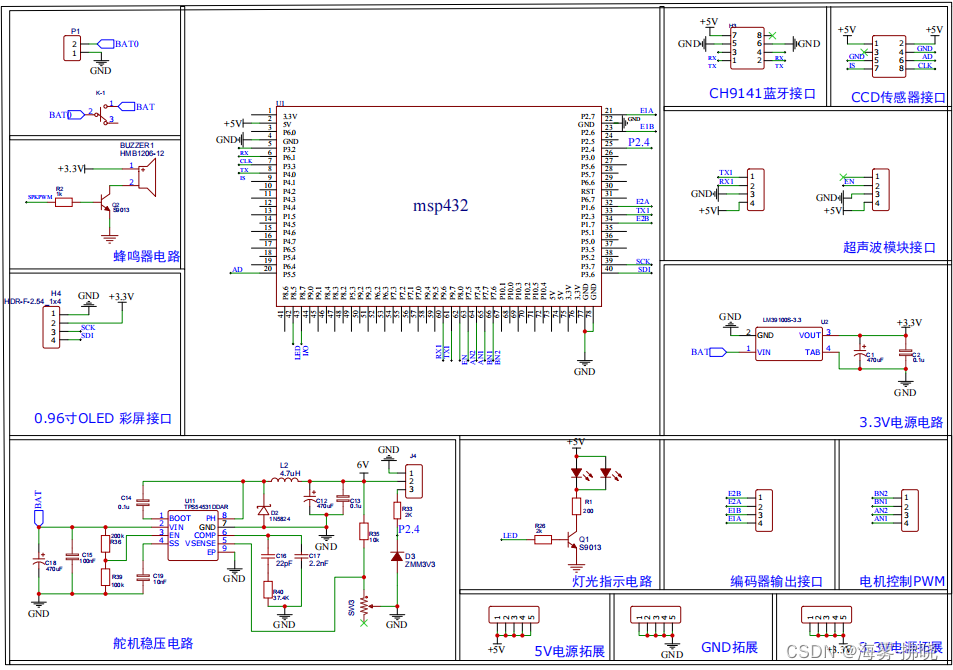
图 4 程序流程图 4测试方案与测试结果 4.1测试方案对程序进行分块测试,先公共部分后独立部分,测试均无误后针对要求的需要进行测试。分模块测试完毕后搭建小车,在领头小车搭建测试完成后再搭建跟随小车,然后将两辆小车在实验室自主搭建按照题目所给出的赛道进行整体测试,包括一键双车起动绕外圈赛道一周,后车超车,前车反超等题目要求的测试。 图 5 赛道框图 4.2 测试结果及改进经过测试,将不稳定区间过大的部分进行了多次优化,使其能高效稳定地完成每步的运作。尤其对PWM信号控制电机转速这一方面做了较大改进,在不断的调试中,使小车行驶更加稳定、准确,减小了许多外界因素造成的干扰。 综上所述,本设计达到要求。 图6 赛道上小车实物 5参考文献[1] 李晓莹.传感器与测试技术.高等教育出版社,2005.1 [2] 禹帆.蓝牙技术.清华大学出版社,2002年 [3] 杨代强.基于单片机的智能玩具电动车的设计与实现.电子科技大学 [4] 刘彩虹.智能小车跟踪技术的研究。浙江大学硕士论文,2007.6 [5] 碰新荣.基于智能小车多平台的多车协作研究.上海交通大学硕士论文,2010.2 [6] 高峰.单片微机应用系统设计及实用技术.北京:机械工业出版社,2004.4 附录1:电路原理图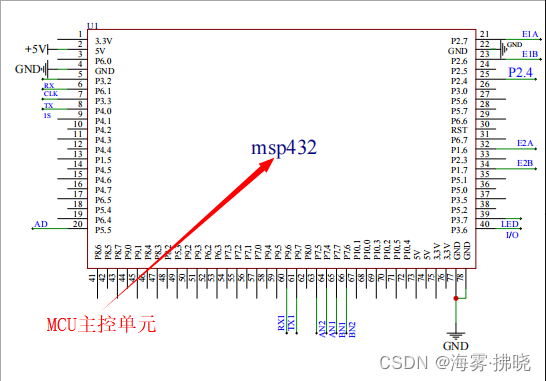
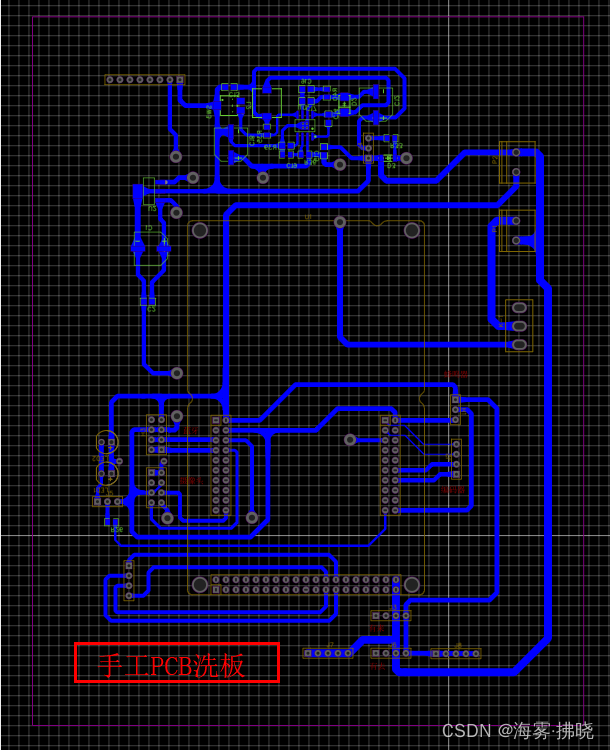
电赛期间没有充足时间进行PCB打板,借用学校内部的洗板设备可以进行手工洗板 这一年参赛证没有去年国赛好看湖南省的在这里
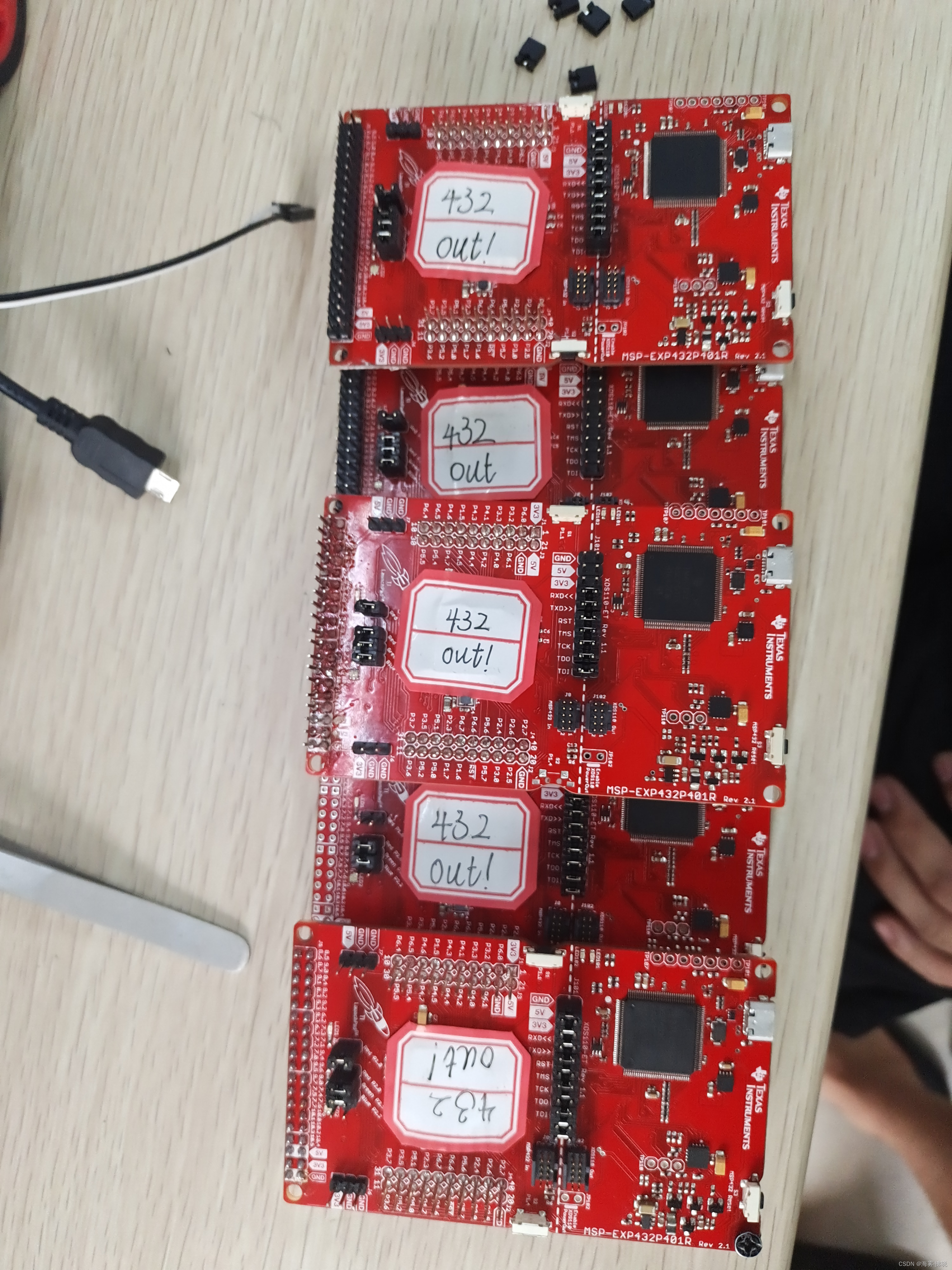
当时烧了很多MSP432芯片,确实这种低功耗就是比较容易烧
单车帅照(带夜灯)晚上也可以跑圈,效果很燃!
双车图片(双宿双飞)
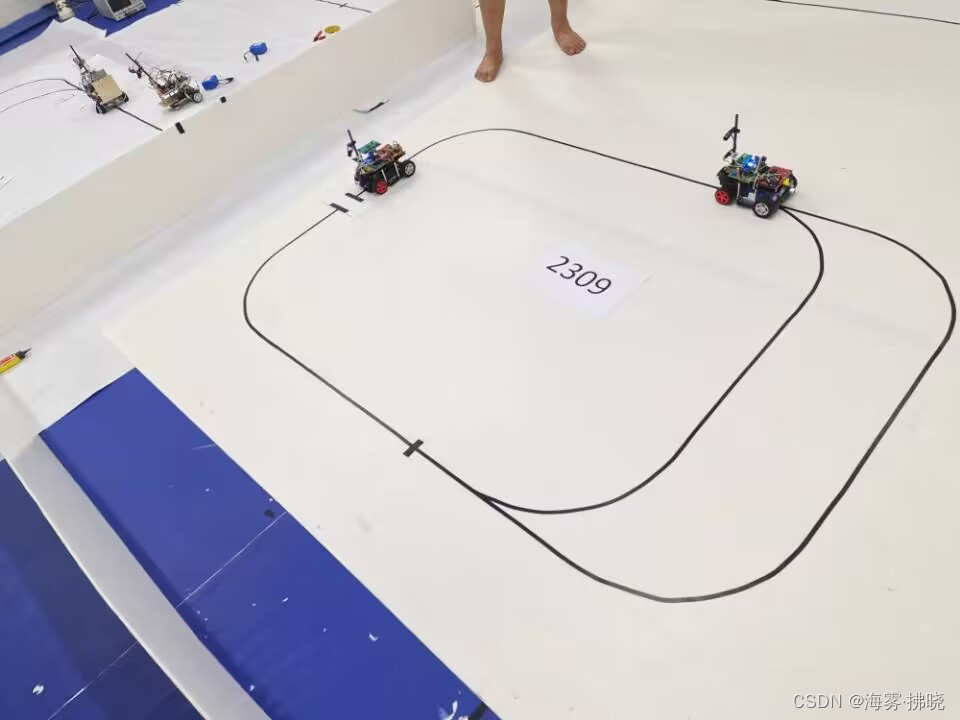
现场测评照片:题组2309
测评的时候,别的组在旁边准备 这里是进行定点停车的测评
|




 跑圈完成之后对于停车时间距进行测量
跑圈完成之后对于停车时间距进行测量 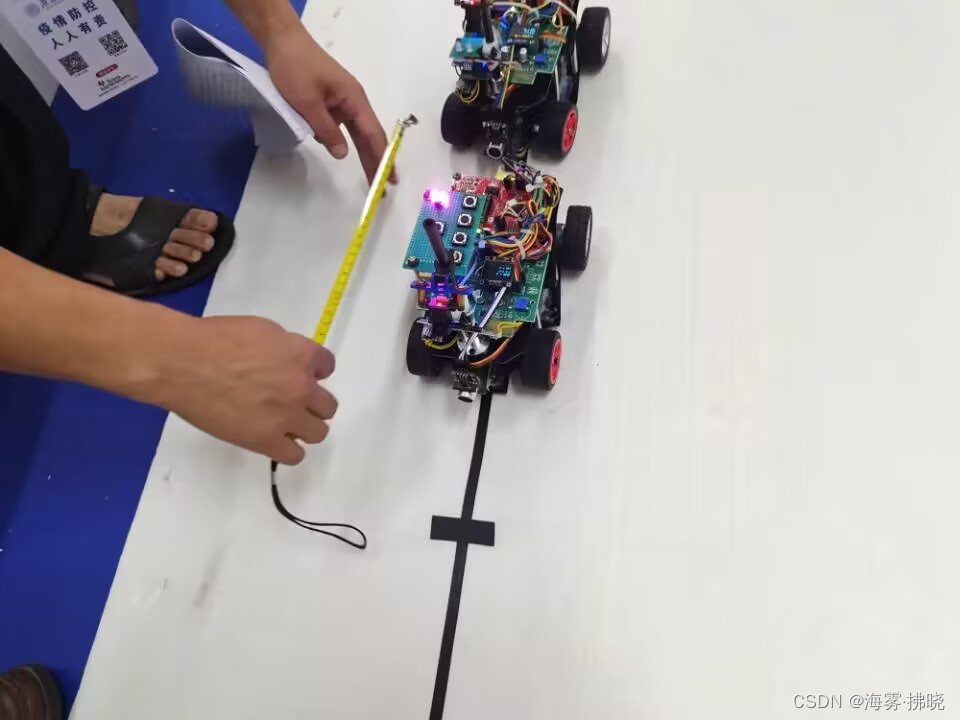 带评委牌子的就是评委
带评委牌子的就是评委 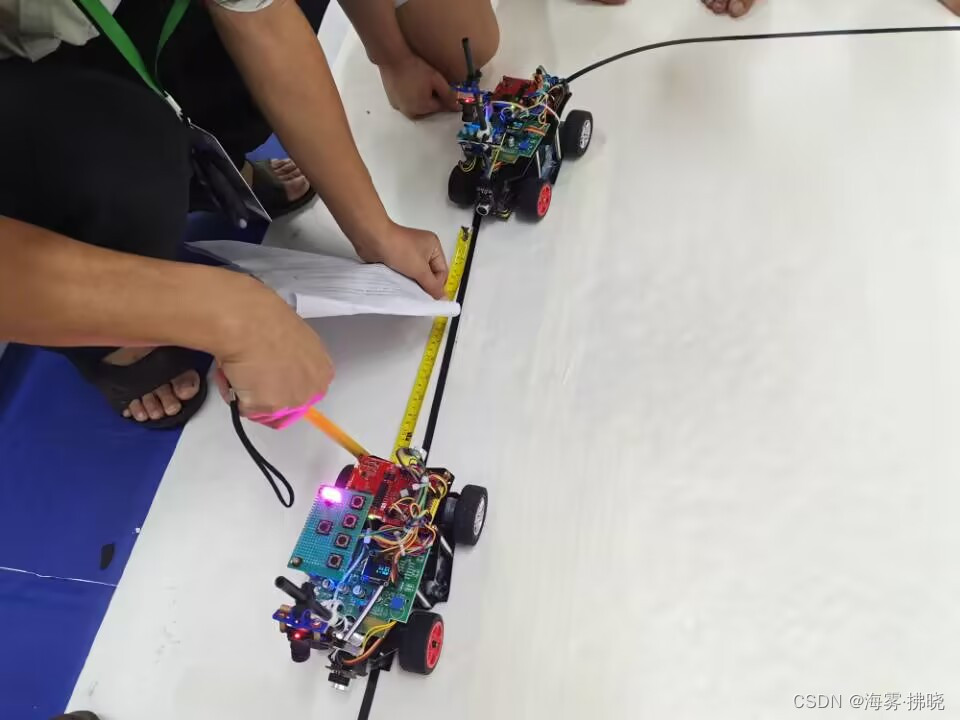
【本文地址】
今日新闻 |
推荐新闻 |