光学基础知识:焦点、弥散圆、景深:概念与计算 |
您所在的位置:网站首页 › 景深与拍摄距离的关系 › 光学基础知识:焦点、弥散圆、景深:概念与计算 |
光学基础知识:焦点、弥散圆、景深:概念与计算
|
来源丨新机器视觉 点击进入—>3D视觉工坊学习交流群 先介绍几个概念: 1、焦点(focus) 与光轴平行的光线射入凸透镜时,理想的镜头应该是所有的光线聚集在一点后,再以锥状的扩散开来,这个聚集所有光线的一点,就叫做焦点。
2、弥散圆(circle of confusion) 在焦点前后,光线开始聚集和扩散,点的影象变成模糊的,形成一个扩大的圆,这个圆就叫做弥散圆。 在现实当中,观赏拍摄的影象是以某种方式(比如投影、放大成照片等等)来观察的,人的肉眼所感受到的影象与放大倍率、投影距离及观看距离有很大的关系,如果弥散圆的直径小于人眼的鉴别能力,在一定范围内实际影象产生的模糊是不能辨认的。这个不能辨认的弥散圆就称为容许弥散圆(permissible circle of confusion)。
不同的厂家、不同的胶片面积都有不同的容许弥散圆直径的数值定义。一般常用的是: 画幅 24mm x 36mm 6cm x 9cm 4" x 5" 弥散圆直径 0.035mm 0.0817mm 0.146mm 35mm照相镜头的容许弥散圆,大约是底片对角线长度的1/1000~1/1500左右。前提是画面放大为5x7英寸的照片,观察距离为25~30cm。 3、景深(depth of field) 在焦点前后各有一个容许弥散圆,这两个弥散圆之间的距离就叫景深,即:在被摄主体(对焦点)前后,其影像仍然有一段清晰范围的,就是景深。换言之,被摄体的前后纵深,呈现在底片面的影象模糊度,都在容许弥散圆的限定范围内。 
景深随镜头的焦距、光圈值、拍摄距离而变化。对于固定焦距和拍摄距离,使用光圈越小,景深越大。
示意图1
示意图2 以持照相机拍摄者为基准,从焦点到近处容许弥散圆的的距离叫前景深,从焦点到远方容许弥散圆的距离叫后景深。 4、景深的计算 下面是景深的计算公式。其中: δ ―― 容许弥散圆直径 f ―― 镜头焦距 F ―― 镜头的拍摄光圈值 L ―― 对焦距离 ΔL1 ―― 前景深 ΔL2 ―― 后景深 ΔL ―― 景深 FδL2 前景深 ΔL1= ―――――― (1) f2 + FδL FδL2 后景深 ΔL2= ―――――― (2) f2 - FδL 2f2FδL2 景深 ΔL = ΔL2 + ΔL2 = ―――――― f4 - F2δ2L2 从公式(1)和(2)可以看出,后景深 > 前景深。 由景深计算公式可以看出,景深与镜头使用光圈、镜头焦距、拍摄距离以及对像质的要求(表现为对容许弥散圆的大小)有关。这些主要因素对景深的影响如下(假定其他的条件都不改变): (1)、镜头光圈: 光圈越大,景深越小;光圈越小,景深越大; (2)、镜头焦距 镜头焦距越长,景深越小;焦距越短,景深越大; (3)、拍摄距离 距离越远,景深越大;距离越近,景深越小。 5、一些计算实例 网上有些在线计算器,有兴趣的网友可以参考: 摄影光学计算器 Windows版本的可下载的计数器在 f/Calc (1)、200/2.8对焦在5m时,f/2.8的景深: δ = 0.035mm f = 200mm F = 2.8 L = 5000mm ΔL1 = 60mm ΔL2 = 62mm ΔL = 122mm 结论 : 该镜头在用f/2.8拍摄时,清晰范围是从4.94m~5.062m,景深很浅。 (2)、200/2.8+2X=400/5.6对焦在5m时,f/5.6的景深: δ = 0.035mm f = 400mm F = 5.6 L = 5000mm ΔL1 = 30mm ΔL2 = 31mm ΔL = 61mm 结论 : 该镜头在配合2X增距镜后,主镜头用f/2.8拍摄时,景深是(1)的一半。 景深的实际拍摄照片 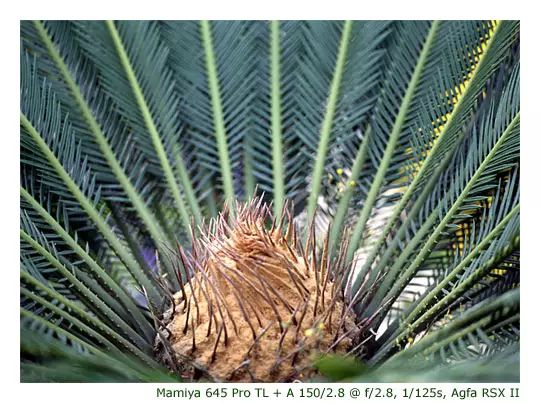 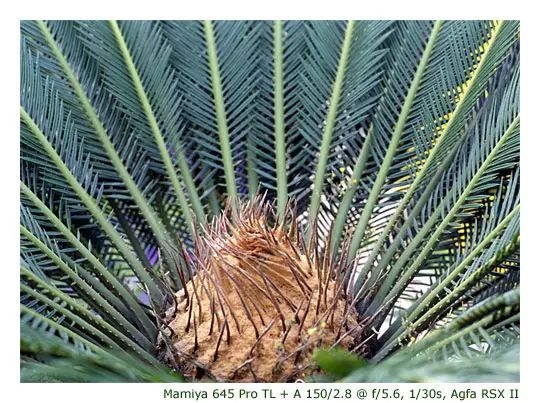 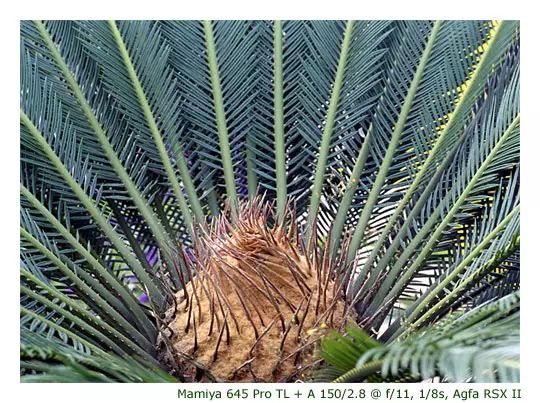 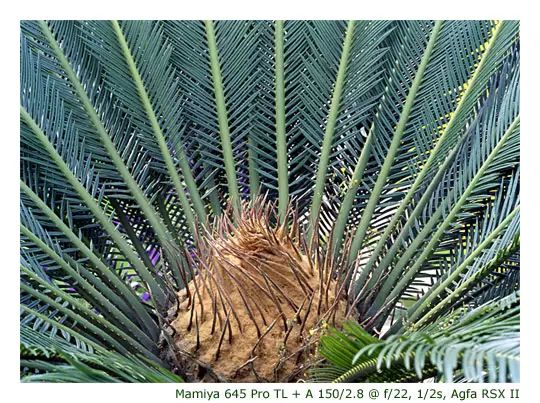
来源:光学人生 本文仅做学术分享,如有侵权,请联系删文。 点击进入—>3D视觉工坊学习交流群 干货下载与学习 后台回复:巴塞罗那自治大学课件,即可下载国外大学沉淀数年3D Vison精品课件 后台回复:计算机视觉书籍,即可下载3D视觉领域经典书籍pdf 后台回复:3D视觉课程,即可学习3D视觉领域精品课程 3D视觉工坊精品课程官网:3dcver.com 1.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)2.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进3.国内首个面向工业级实战的点云处理课程4.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解5.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦6.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化7.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM) 8.从零搭建一套结构光3D重建系统[理论+源码+实践] 9.单目深度估计方法:算法梳理与代码实现 10.自动驾驶中的深度学习模型部署实战 11.相机模型与标定(单目+双目+鱼眼) 12.重磅!四旋翼飞行器:算法与实战 13.ROS2从入门到精通:理论与实战 14.国内首个3D缺陷检测教程:理论、源码与实战 15.基于Open3D的点云处理入门与实战教程 16.透彻理解视觉ORB-SLAM3:理论基础+代码解析+算法改进 重磅!粉丝学习交流群已成立 交流群主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、ORB-SLAM系列源码交流、深度估计、TOF、求职交流等方向。 扫描以下二维码,添加小助理微信(dddvisiona),一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。
▲长按加微信群或投稿,微信号:dddvisiona 3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口: 学习3D视觉核心技术,扫描查看,3天内无条件退款
高质量教程资料、答疑解惑、助你高效解决问题 觉得有用,麻烦给个赞和在看~ |


【本文地址】
今日新闻 |
推荐新闻 |