生活中软件易用性的例子 |
您所在的位置:网站首页 › 易学易用创新的例子 › 生活中软件易用性的例子 |
生活中软件易用性的例子
前言:人机协作是协作机器人显著特点和优势,安全性则是人机协作的前提,易用性则是其迅速发展的必备条件。 编辑| 符号 整理| Sunny 机器人大讲堂直播间 045期 近年来,协作机器人发展迅猛,成为机器人研究及研发的热点之一,主要得益于其易用性、灵活性、安全性等三个方面。与传统工业机器人相比,协作机器人体现了人机协作概念,使其具有一定自主及与人协作的能力。 协作机器人将人的智力、经验与机器人的速度、力量以及准确性相结合,突破了传统工业机器人工作区域,实现人机协作在同一工作区域,使其真正成为人类合作的伙伴。人机协作是协作机器人显著特点和优势,安全性则是人机协作的前提,易用性则是其迅速发展的必备条件。 虽然协作机器人的拖动示教功能特性使其易用性大大提高,但目前市场上的一些协作机器人产品,它们提供的图形界面只能完成一些简单的拣选/取放任务,仍在易用性上存在问题。 我们特邀艾利特机器人算法研发工程师王珂博士做客「机器人大讲堂直播间」,分享协作机器人安全易用性的全新探索。 本期分享要点如下 协作机器人简介协作机器人的安全性协作机器人的易用性协作机器人软件的平台化以下内容根据王珂博士直播分享实录整理 一、协作机器人简介在国际标准化组织工业标准ISO10218中协作区域是指机器人和人类可以同时工作的区域,那么协作机器人是指能够在协作区域内与人直接交互协作的机器人。2005年,欧盟提出了SMEs(Smalland Medium Enterprises)项目计划,旨在通过机器人技术增强中小企业的劳动力水平,降低成本,提高竞争力,避免劳动力外包,将制造业和工作机会留在欧洲。 从中可以看出,中小企业具有小批量、多品种、个性化的产品制造需求,要求机器人更低成本、更安全、更易用,部署更灵活。因此,协作机器人应运而生。同传统工业机器人对比,协作机器人有着很多不同点: 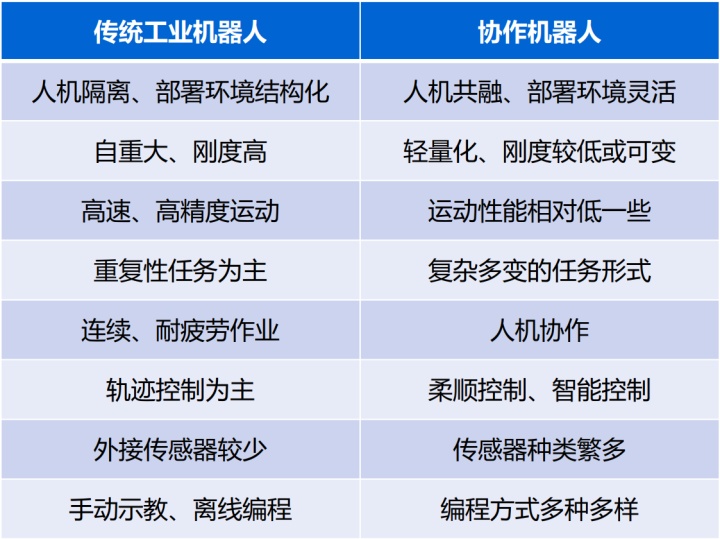
国外常见的协作机器人类型: 
总的来说,协作机器人产品具有三个特点: 集成部署成本较低 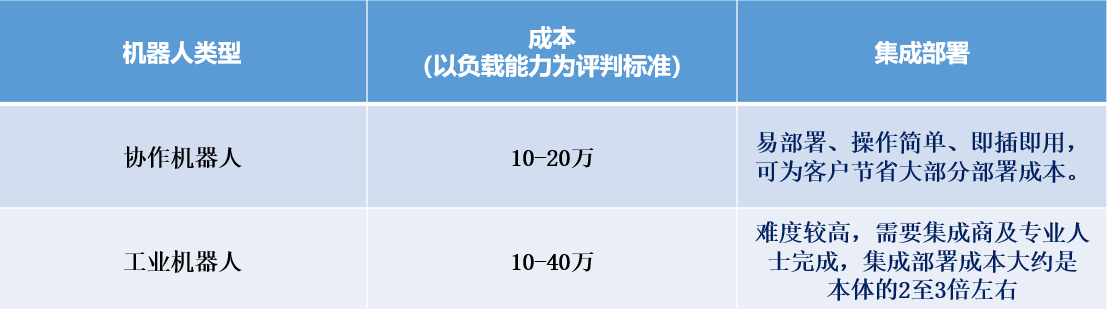
操作简单、更适应柔性化生产 协作机器人轻量化、占地小、结构紧凑,可安装在产线的任何位置,非常适合混线、小批次、定制化生产的需求。 安全性更高、满足人机协作的需求 协作机器人采用特殊机械设计以及限制运行速度、电机功率、关节力矩等安全措施,使其具备碰撞力最小化的功能,满足人机协作的需求。 二、协作机器人的安全性提及协作机器人的安全性就不得不先考虑其安全标准,协作机器人的安全标准是在工业机器人的基础上发展而来的。 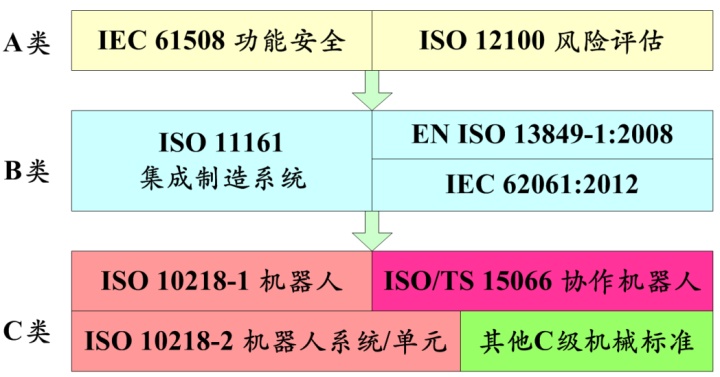
ISO10218为C级标准,由A级标准和B级标准演化而来,ISO10218-1为机器人本体设计与制造中的安全保证提供指导与规范, ISO 10218-2为机器人系统集成、安装、功能测试、编程、维护和修理等提供安全指导与规范。 协作机器人安全规范ISO/TS 15066是传统工业机器人标准的补充。主要解决危害判定、风险评估以及降低风险的措施等问题。我国的GB11291中5.10.1-5.10.6也定义了协作机器人的协同操作安全标准。具体来说,ISO/TS 15066定义了四种人机协同的操作: 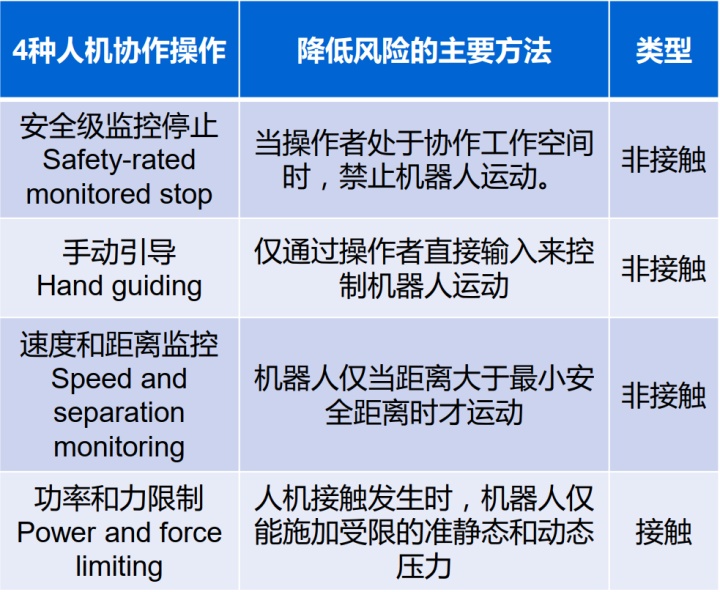
前3种协作操作不允许机器人与人直接接触,传统工业机器人经改造后也能实现。功率和力限制是从更底层和根本上限制机器人对人的伤害程度,也是真正让协作机器人区别于传统工业机器人的更本质、更高级和更安全的协作方式。 机器人与人体碰撞的限制参数可由人类疼痛阈值计算,研究表明:人体各部位对压力造成的疼痛的耐受度不同,一般取平均值150N左右,但该结果局限性较大。 碰撞检测:动力学模型的建立 根据牛顿欧拉法进行动力学建模,考虑关节柔性、摩擦力、减速器等。 
关节柔性模型:刚度系数为 K 的扭簧(可单独辨识)。 
摩擦力模型:粘性库伦模型、改进Stribeck模型、 LuGre模型、Leuven模型等。 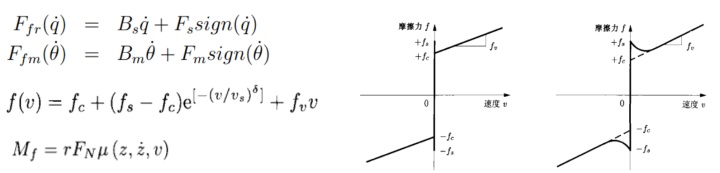
碰撞检测:动力学模型的辨识 通过采集关节位置和力矩数据,基于最小惯性参数集的动力学方程和最小二乘法,可计算出动力学模型参数。 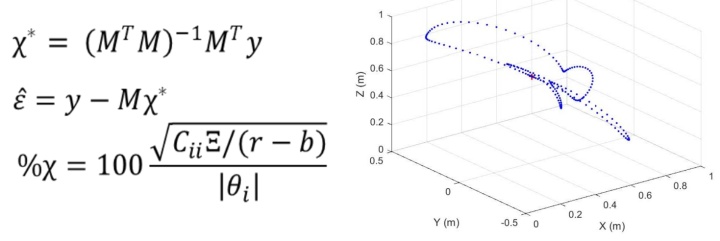
需要注意的是在线辨识使用滤波器引入相位延迟的处理;辨识轨迹的设计与优化影响观测矩阵是否满秩以及辨识参数的误差。 碰撞检测功能展示 常见的碰撞检测功能实现依据模型不同对应的有几种方式,其特点也不尽相同: 
艾利特机器人碰撞检测功能是基于关节电流-力矩模型的,其具有以下优势: 1)基于更精准的动力学模型,包括优化的关节摩擦模型、关节柔性模型、温度模型、负载参数模型等;可选择预设动力学模型参数、在线模型辨识两种模式。 2)碰撞检测灵敏度可调节。 3)除低成本解决方案外,后续还会推出带有力矩传感器的版本。 除此之外,还具有多方案安全参数配置与监测功能,其采用了多项原创专利技术提升安全性,设计符合ISO 10218-1、 ISO 13849 cat3 PLd、TS/ISO 15066标准。 硬件、软件算法均双通道冗余设计,多级别安全配置方案可灵活切换,包含18项安全功能,其中运动功能13项:工具位姿、工具速度、工具力、肘部位置、肘部速度、肘部力、关节位置、关节速度、关节转矩、停止时间、停止距离、动量、功率。 IO和状态功能5项:紧急停止(输入、输出)、安全停止(输入、复位输入)、缩减模式(输入、正逻辑输出、负逻辑输出)、运动状态(正逻辑输出、负逻辑输出)、回零(输出)。  艾利特CS系列多方案安全参数配置与监测
三、协作机器人的易用性
艾利特CS系列多方案安全参数配置与监测
三、协作机器人的易用性
协作机器人的易用性相对传统工业机器人也有了很大的提升,主要体现在五个方面: 示教器与图形化用户交互界面 示教器样式多种多样:传统按钮式、全触屏式、无线平板式、手机操控等。用户交互界面的设计更加注重用户体验以及交互性。 
编程方式的改变 传统工业机器人采用代码式编程,G代码或类似C语言,用户编程门槛较高,需要进行专门的课时培训。协作机器人编程趋势为图形化编程方式,像流程图式、树形图式等,更加直观且与用户交互性更强,简单易学、灵活易用,是更通用的脚本语言编程。 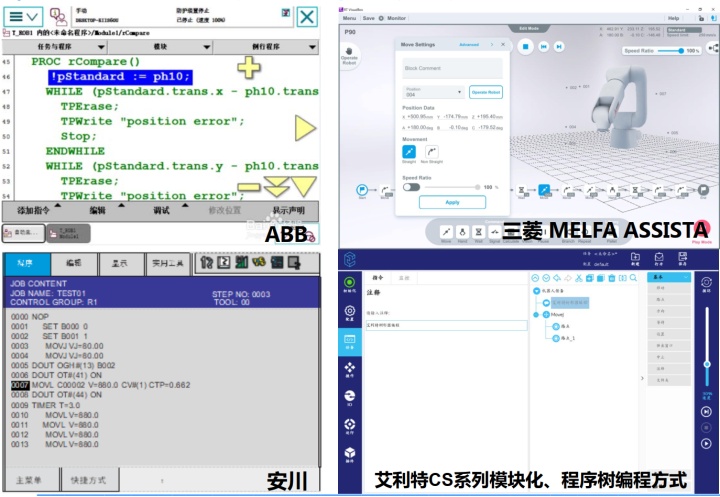
拖动示教与轨迹复现功能协作机器人具有更灵敏、更顺滑的拖动示教功能:轻按末端拖动按钮,即可拖动示教点位,进行交互式编程,更便捷;拖动示教及轨迹复现功能:可记录机械臂的运动轨迹,并以原速度或者可调节的速度进行轨迹复现;约束拖动功能:可拖动机器人延着用户指定的方向运动。 
自动化部署、自动轨迹规划与避障 随着机器人应用领域的不断扩展,人们需要更加强大、简便和快速的机器人自动化部署方式。自动轨迹规划与避障成为自动化部署的关键技术之一。 自动轨迹规划算法核心框架: 
案例:拆零和拣选两种模式自循环 首先将混合箱中的药盒分类到4个药箱,然后系统随机生成若干订单,机械臂按照订单拣选药品;真实环境模型重建并通过视觉算法更新,实时自动轨迹规划生成机械臂抓取药盒的无碰撞运动轨迹;多拍照位置,每个拍照位置使用不同的ROI和过滤盒,提高识别准确度和抓取可靠性;直接计算抓取姿态的运动学逆解,预览机械臂抓取时的实际位形;单次轨迹规划时间约100至200ms。 
部署灵活、扩展性强部署简单灵活,可部署于各个行业生产线上的任何位置,甚至可以部署在AGV上进行协同作业;通用末端IO接口,实现夹爪等工具的即插即用。 知乎视频www.zhihu.com目前协作机器人软件开放性不足,终端用户的应用创新空间有限,机器人厂商针对各类应用场景开发种类繁多的工艺包,终端用户针对新应用的研发、时间成本高的问题。 所以目前要推广协作机器人软件平台化,期望机器人厂商可以专注于机器人技术的研发,用户、集成商针对细分行业的应用场景开拓更为多样化的应用,可以助力用户、集成商基于软件平台快速开发部署解决方案,增强软件的开放性,构建机器人软件生态圈以及增强扩展性,面向未来,无缝对接物联网、云计算、大数据分析等前沿技术。 
针对软件的二次开发与第三方插件系统方面,艾利特CS系列推出了第三方插件系统,该系统具有的优势有: 1)模块化的软件平台与框架 2)具有高开放性、强扩展性的第三方插件系统,方便各个行业的客户或集成商 进行二次开发,编写自己的软件和应用(如焊接、物流等) 3)助力用户加快开发和部署解决方案的周期 4)针对各垂直行业和应用场景 5)增加集成商方案产品的附加值 6)绑定客户并提供增值服务,形成更健康的销售模式和商业模式。  艾利特CS系列基于JAVA的第三方插件系统
艾利特CS系列基于JAVA的第三方插件系统
该系统使用python作为脚本编程语言,Python脚本语言作为一种通用的脚本语言,相对于传统的工业脚本语言来说更具开放性,覆盖范围更广,让使用者不受限制。通用的Python脚本语言使机器人编程更具扩展性、灵活性更强。 
案例分析1 视觉识别分拣螺钉展示,可以作为第三方插件进行移植: 知乎视频www.zhihu.com案例分析2 视觉识别拆码垛展示: 知乎视频www.zhihu.com案例分析3 协作机器人行业和工艺应用: 
对于未来的协作机器人,艾利特CS系列并不是终极形态,协作机器人本质安全性仍需努力,需要与多种感知能力相结合进行冗余设计,人机高效、便捷交互仍有提升的空间,协作机器人更多的应用场景有待挖掘,人机协作共融技术智能化、云端化。 - END - 私信我即可获得完整版PDF、直播回放链接以及“协作机器人”交流群入群方式。 |
【本文地址】