单目视觉标定(1)原理解析 |
您所在的位置:网站首页 › 无人机视觉标定的作用和目的 › 单目视觉标定(1)原理解析 |
单目视觉标定(1)原理解析
|
标题:单目视觉标定(1)原理解析
一、相机标定目的
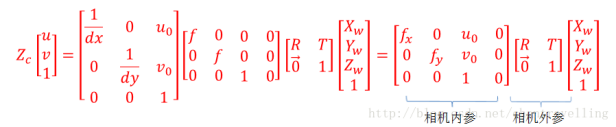
一、相机标定目的 为什么重要? 在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。 无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。因此,做好相机标定是做好后续工作的前提,提高标定精度是科研工作的重点所在。 标定目的: 第一,要还原摄像头成像的物体在真实世界的位置就需要知道世界中的物体到计算机图像平面是如何变换的,相机标定的目的之一就是为了搞清楚这种变换关系,求解内外参数矩阵。 第二,摄像机的透视投影有个很大的问题——畸变。摄像头标定的另一个目的就是求解畸变系数,然后用于图像矫正。 二、相机标定原理 2.1坐标系转换二、相机标定原理 2.1四大坐标系转换: 相机标定涉及四大坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。 (1)世界坐标系转换至相机坐标系: (2)相机坐标系转换至图像坐标系: (3)图像坐标系转换至像素坐标系: (4)得出坐标转换最后公式 2.2坐标系旋转与其次坐标的理解: (5)坐标系旋转原理: 2.3畸变参数影响 : 2.2畸变参数 (1)畸变一般可以分为:径向畸变、切向畸变,其他畸变影响相对较小一般不考虑。 ps:畸变是相机本身的固有特性,和相机内参相同。 畸变相当于转换过程中增加了一步:
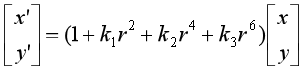
常见的畸变模型有一阶和二阶畸变模型,还有考虑了切向畸变的四阶和八阶模型。 (2)畸变类型 径向畸变:(桶形畸变和枕形畸变) 产生原因是在相机制造过程中,很难保证镜头的厚度完全均匀,由于制造工艺的原因,通常为这种情况为中间厚、边缘薄,因而光线在远离透镜中心的地方,会发生更大程度的扭曲。 切向畸变:(薄透镜畸变和离心畸变) 切向畸变原因:在于相机在制造过程中,成像平面与透镜平面不平行。 (3)畸变校正函数:一般采用泰勒展开来描述 径向畸变: 切向畸变: 所以得到5个畸变参数: r 为曲率半径,有 r2=x2+y^2 —x,y 为发生畸变后像点的坐标,也就是我们实际看到的; —x’,y’ 为畸变矫正,也就是去除畸变后的正确像点坐标; —k1,k2,k3为径向畸变系数, 对于畸变较小的图像中心区域,主要是k1在起作用; 对于畸变较大的图像边缘区域,主要是k2在起作用; 而对于广角相机,才会用k3去校正相机的畸变。 —p1,p2为切向畸变系数 参考: 四大坐标系变换: https://blog.csdn.net/qq_36537774/article/details/81604481? 一文图解相机标定: https://blog.csdn.net/Yong_Qi2015/article/details/108332697? 三维坐标旋转矩阵: https://blog.csdn.net/Nr0315/article/details/89813587? 齐次坐标的理解:https://www.cnblogs.com/csyisong/archive/2008/12/09/1351372.html |



 (6)其次坐标理解:
(6)其次坐标理解:






【本文地址】
今日新闻 |
推荐新闻 |